车载以太网介绍
Contents
目录
1 Preface
1.1 Purposeof the document
2 缩略词
3 简介
3.1 驱动力
3.2 车载以太网使用案例
3.2.1 高级驾驶员辅助系统 (ADAS)
3.2.2 主干网架构:
3.2.3 诊断
3.2.4 全球通信
3.2.5 信息娱乐系统:
3.3 车载以太网发展过程
3.3.1 量产车案例
3.3.2 以太网推进的动力:高带宽
3.3.3 物理层
4 和CAN的对比
4.1 网络拓扑结构
4.2 为什么以太网和传统的车载网络不同?
4.2.1 网络类型
4.2.2 介质访问控制
4.2.3 数据传输服务
4.2.4 吞吐量throughput
4.2.5 寻址
4.2.6 监控
4.2.7 基于服务的通信方式
4.2.8 错误帧
5 标准化机构
5.1 IEEE 802 制定 LAN/MAN 技术标准(自1980起生效)
5.2 互联网工程任务组——IETF (InternetEngineering Task Force)
5.3 AUTOSAR
联盟——AVnu Alliance
联盟——OPEN Alliance
5.6 JASPAR – 下一代高速局域网组织
6 物理层标准概述
6.1 IEEE P802.3BW: 100BASE-T1 100M Single-Pair Ethernet (1TPCE)
6.2 IEEE P802.3BP: 1000BASE-T1 Reduced Twisted Pair Gigabit Ethernet (RTPGE)
6.3 IEEE P802.3BU: power over data lines (“PODL”)
6.4 IEEE P802.3BV: Gigabit Ethernet over POF (Plastic Optional Fiber)
1.1 Purpose of thedocument
2 缩略词
3 简介
3.1 驱动力
3.2 车载以太网使用案例
3.2.1 高级驾驶员辅助系统 (ADAS)
3.2.2 主干网架构:
3.2.3 诊断
3.2.4 全球通信
3.2.5 信息娱乐系统:
3.3 车载以太网发展过程
3.3.1 量产车案例
3.3.2 以太网推进的动力:高带宽
3.3.3 物理层
4 和CAN的对比
4.1 网络拓扑结构
4.2 为什么以太网和传统的车载网络不同?
4.2.1 网络类型
4.2.2 介质访问控制
4.2.3 数据传输服务
4.2.4 吞吐量throughput
4.2.5 寻址
4.2.6 监控
4.2.7 基于服务的通信方式
4.2.8 错误帧
5 标准化机构
5.1 IEEE 802 制定 LAN/MAN 技术标准(自1980起生效)
5.2 互联网工程任务组——IETF (Internet Engineering Task Force)
5.3 AUTOSAR
5.4 AVnu 联盟——AVnu Alliance
5.5 OPEN联盟——OPEN Alliance
5.6 JASPAR – 下一代高速局域网组织
6 物理层标准概述
6.1 IEEE P802.3BW: 100BASE-T1 100M Single-Pair Ethernet(1TPCE)
6.2 IEEE P802.3BP: 1000BASE-T1 Reduced Twisted Pair Gigabit Ethernet (RTPGE)
6.3 IEEE P802.3BU: power over data lines (“PODL”)
6.4 IEEE P802.3BV: Gigabit Ethernet over POF (PlasticOptional Fiber)
更多精彩内容可关注微信公众号“激活未来”

1 Preface
1.1 Purposeof the document
细致地了解车载以太网协议。
2 缩略词
| 缩写 |
全称 |
描述 |
| ADAS |
Advanced Driver Assistance Systems |
高级驾驶员辅助系统 |
| IEEE |
Institute of Electrical and Electronics Engineers |
电气与电子工程师协会 |
| IEEE 802(又称LMSC) |
LAN/MAN Standards Committee |
局域网/城域网标准委员会 |
| LAN |
Local Area Network |
局域网 |
| MAN |
Metropolitan Area Network |
城域网 |
| WAN |
Wide Area Network |
广域网 |
| V2X |
vechicle to everything |
|
| IETF |
Internet Engineering Task Force |
互联网工程任务组 |
| TSN |
Time-Sensitive Networking |
时间敏感网络 |
| BRR |
BroadR-Reach |
博通汽车以太网互联技术 |
| OABR |
Open Alliance BroadR-R |
|
| PHY |
physical layer |
物理层 |
| MAC |
Media Access Control |
媒体存取控制 |
3 简介
-
车载以太网增长前景
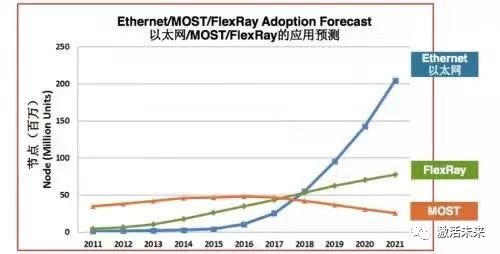
2018: 65 百万Ethernet-Sockets, 2021: > 200 百万
3.1 驱动力
· 信息娱乐系统
· 高级驾驶员辅助系统 (ADAS)
· 诊断
3.2 车载以太网使用案例
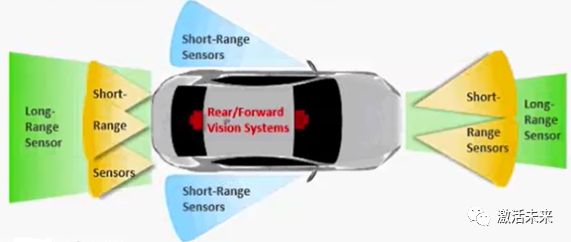
3.2.1 高级驾驶员辅助系统 (ADAS)
- 传感器数量增加
- 高带宽传感器(短/长距离雷达、激光雷达、摄像头等)
3.2.2 主干网架构:
- 可快速连接的域控制器
- 车内ECU之间的支持更高的带宽
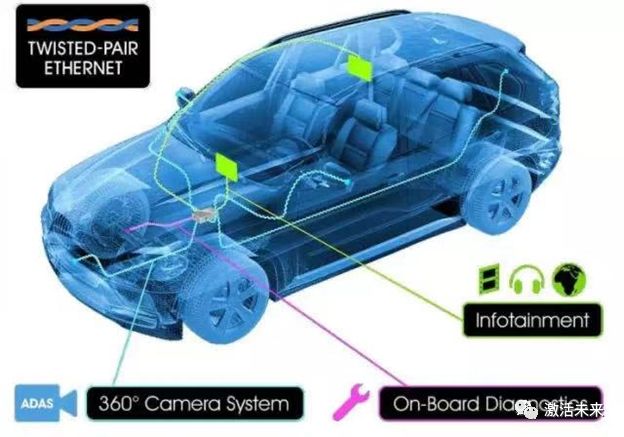
3.2.3 诊断
- 用于诊断的高速区域访问(通过网关更新软件,比如单ECU形式)
- 直接的快速的刷写 (直接更新软件,比如,更新多个支持Eth的ECU)
3.2.4 全球通信
- 智能的充电管理(单ECU形式,电力线/无线,IPv6)
- 网络互联(V2V,V2I,V2X,单ECU形式,无线,IPv6)
3.2.5 信息娱乐系统:
- 后座娱乐系统
- 使用网络替代昂贵的专用音频/视频电缆或点对点链接(如LVDS)
3.3 车载以太网发展过程
3.3.1 量产车案例
- BMW量产车:以太网用于快速刷写
目标:通过以太网快速并行地刷写ECU,最大刷写时间小于15分钟(无以太网更新软件需16小时)
- SOP 2013, BMW:以太网作为一个子系统(摄像头用于辅助系统,X5)
- SOP 2015, BMW:以太网作为车载总线(信息娱乐系统和高级驾驶员辅助系统)
- SOP 2015, JLR:以太网用于信息娱乐系统
- 其他的主机厂也将以太网应用于自己的产品中: Daimler, VW, GM, Renault…
BMW以太网搭载
3.3.2 以太网推进的动力:高带宽
| 总线类型 |
相比于CAN的带宽比例 |
带宽 (Mbit/s) |
网络拓扑结构 |
传输介质 |
应用领域 |
优势 |
缺陷 |
描述 |
| Eth |
100x – 1000x |
100 - 1000 |
星型/树型 |
双绞线 |
车联网/ADAS |
高带宽 |
全双工 每个链路、每个方向的带宽都同时可用 |
|
| MOST |
150x |
150 |
环形 |
光纤 |
娱乐系统 |
高带宽 |
成本高,仅有限个摄像头 |
所有节点共享带宽 |
| FlexRay |
10x (20x) |
2*10 |
总线型/星型/混合型 |
双绞线/光纤 |
实时控制 |
高带宽 |
成本高 共享传输介质 |
双通道操作(每个通道有单独的电缆) |
| CANFD |
6x |
8 |
总线型 |
双绞线 |
实时控制、通信 |
成本低,可靠 |
带宽低 共享传输介质 |
1 Mbit/s 仲裁段,8 Mbit/s数据段,64字节帧长 |
| CAN |
1x |
1 |
总线型 |
双绞线 |
实时控制、通信 |
成本低,可靠 |
带宽低 共享传输介质 |
比较参考值(1 Mbit/s) |
| LIN |
0.02x |
19.2 Kbit/s |
总线型 |
单缆 |
低带宽控制 |
成本更低 |
成本低 共享传输介质 |
用于智能传感器,低带宽 |
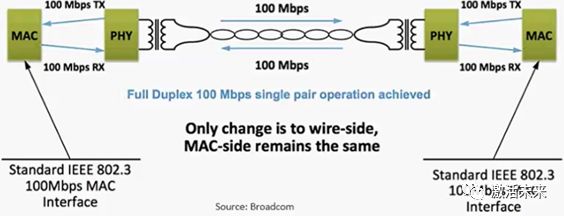
3.3.3 物理层
· 实现
- 汽车环境中专用物理层
目前: 100Mbit/s全双工非屏蔽双绞线——和CAN一样的线
4 和CAN的对比
4.1 网络拓扑结构
车载以太网
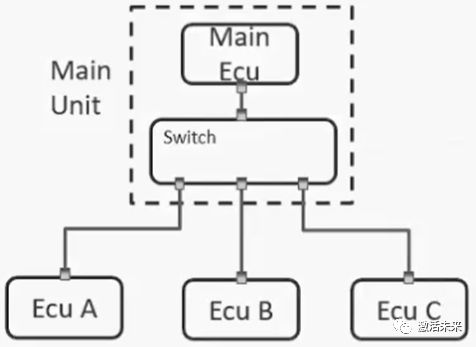
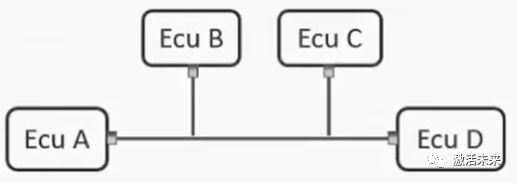
CAN
4.2 为什么以太网和传统的车载网络不同?
4.2.1 网络类型
车载以太网:交换网络(星型或树型拓扑结构)
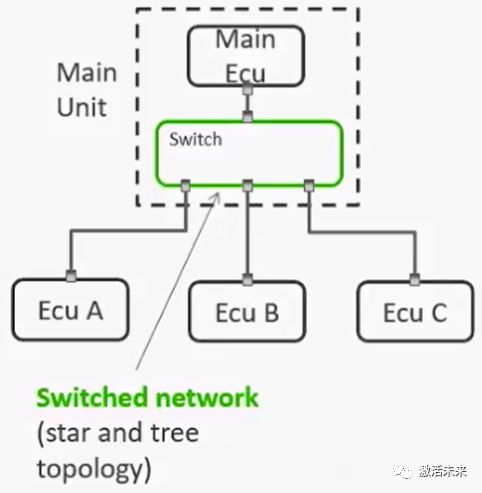
CAN:总线型

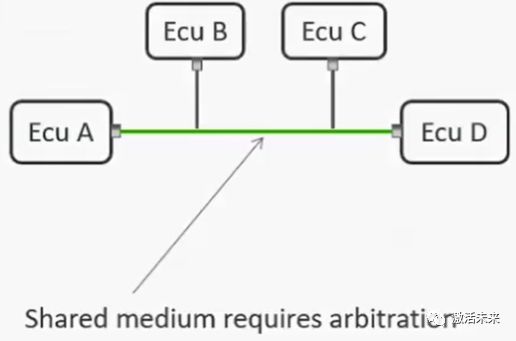
4.2.2 介质访问控制
车载以太网:无竞争的点对点连接
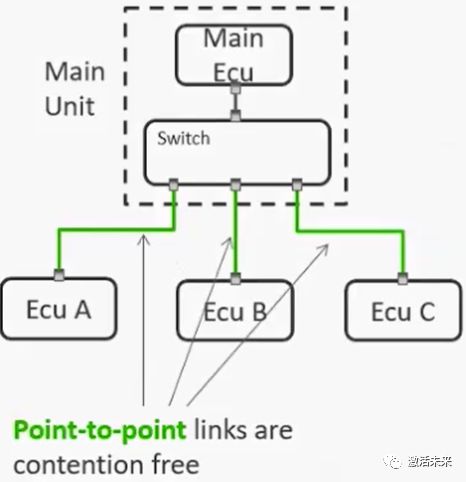
CAN:共享介质,需要仲裁。
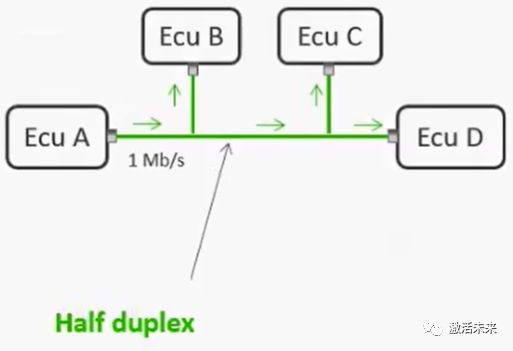
4.2.3 数据传输服务
车载以太网:全双工
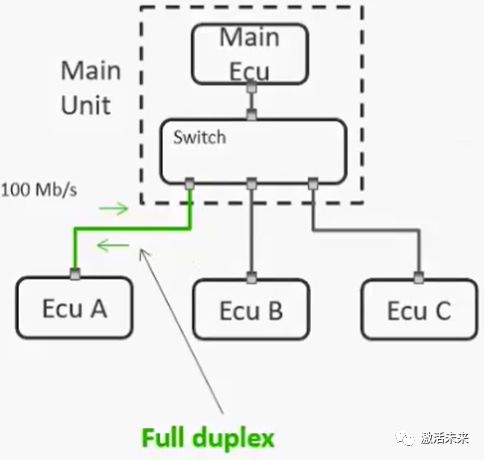
CAN:半双工
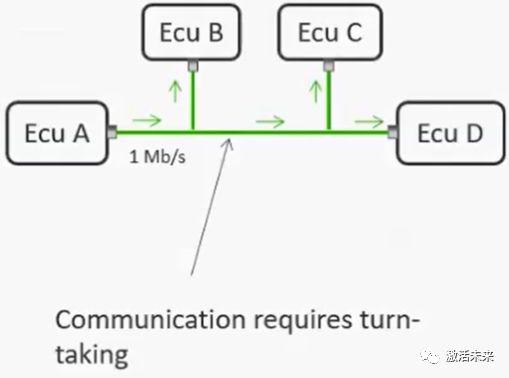
4.2.4 吞吐量throughput
车载以太网:支持多个同时发生的数据流。
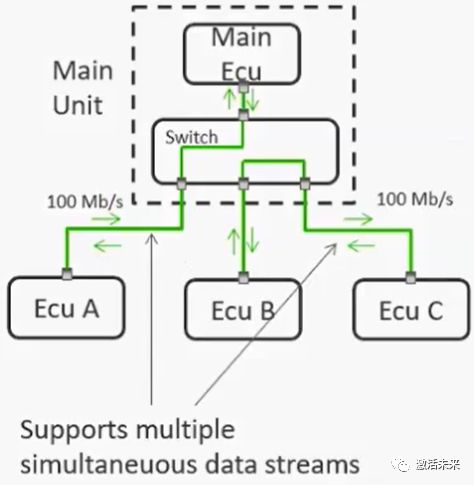
CAN:轮流通信
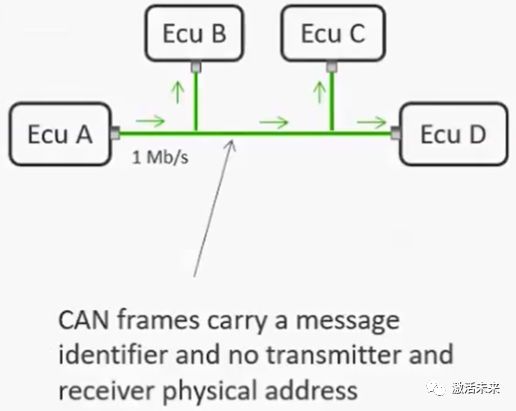
4.2.5 寻址
车载以太网:以太网帧携带发送方和接收方的物理地址。
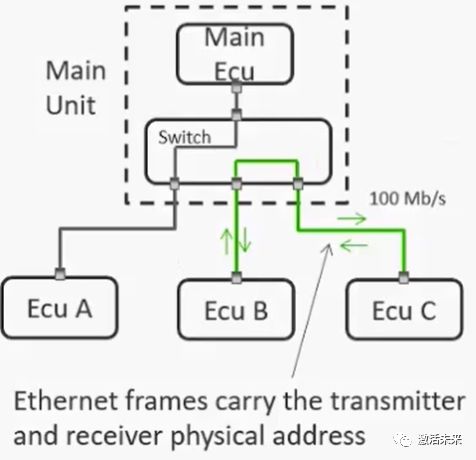
CAN:CAN帧携带一个报文标识符,没有发送方和接收方的物理地址。
4.2.6 监控
车载以太网:同网络中,不需要通信的节点收不到其他节点发给其他节点的报文。
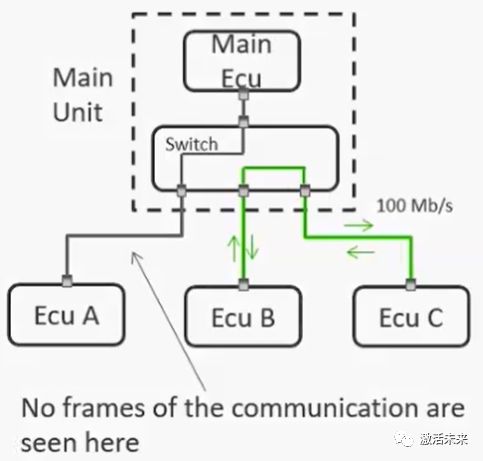
CAN:广播式的通信,同网络中所有的接收方都能接收到。

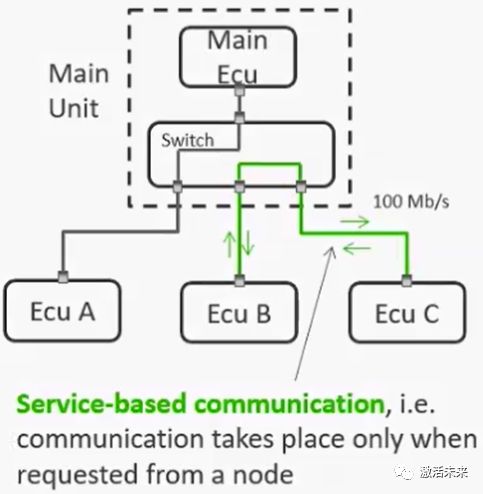
4.2.7 基于服务的通信方式
车载以太网:基于服务的通信方式,比如:只有当一个节点请求时,报文才会发送。
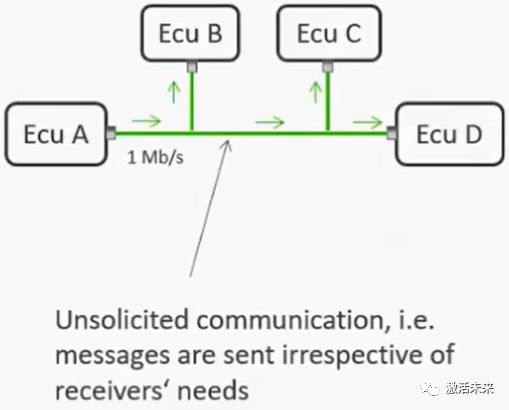
CAN:主动通信,发送报文时不考虑接收方是否需要。
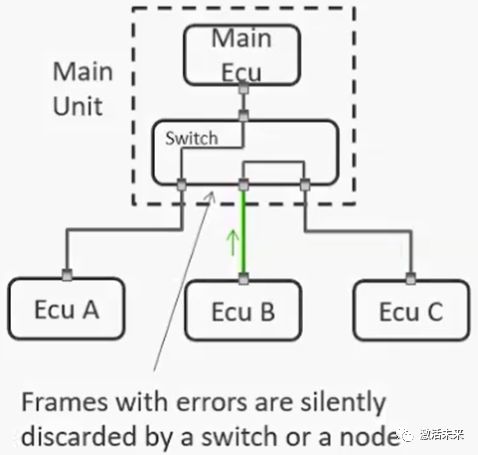
4.2.8 错误帧
车载以太网:有问题的帧会被交换机或者某个节点丢弃。
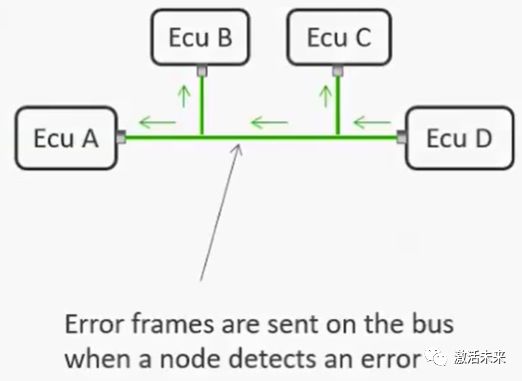
CAN:当一个节点监测到错误时,会往总线上发送错误帧。
5 标准化机构

5.1 IEEE 802 制定 LAN/MAN 技术标准(自1980起生效)
· 主要用于网络栈的链路层和物理层
- 所有的出版的标准都能在他们的官网上下载
· 802.1:更高层的局域网协议调查委员会(TSN,安全等):L2/>L2
- 例如:802.1AS(TimeSync), 802.1CB (Frame Replication and Elimination for Reliabilty)
· 802.3以太网调查委员会(指定以太网标准):L1/L2
· 两者“共享”第2层:“项目可以从一个工作组开始,在另一个工作组产生第二个项目,以提供完整的解决方案”
5.2 互联网工程任务组——IETF (InternetEngineering Task Force)
· 发布RFC(Request for Comments请求评议)—— 设置和维护互联网协议基础技术标准的论坛(软件,而非硬件)。
- 例如:RFC#1122(因特网对主机的要求 —— 通信层communication layer)、RFC#768(用户数据报协议UserDatagram Protocol – UDP)
5.3 AUTOSAR
-
车载以太网协议栈automotiveEthernet Stack (定义的协议与IETF规范深度链接,定义的API:非阻塞AUTOSAR API)
-
联盟——AVnu Alliance
-
在以下行业推广AVB/TSN标准:汽车、消费、专业音频/视频、工业
-
特点:一致性、互联互通性、需认证
-
联盟——OPEN Alliance
(One-Pair Ether-Net)单对以太网联盟
· 促进基于以太网的汽车互联的广泛应用
· 目标:
- 把BroadR-Reach®技术建设为开放的标准
- 互通性测试(TC8)、解决标准化差异(TC5)和发起活动,以减少标准化组织间的分歧等
5.6 JASPAR – 下一代高速局域网组织
· 目标:为日本主机厂引进汽车以太网提供支持
· 范围:物理层、线束
6 物理层标准概述
6.1 IEEE P802.3BW: 100BASE-T1 100M Single-Pair Ethernet (1TPCE)
单对双绞线实现100Mbit/s数据传输
· 100Mbit/s 全双工
· 通过单个非屏蔽双绞线电缆通信(最长15米)
· 适应汽车环境(如:EMC:地发射/高抗干扰、适应高低温)
· 与已有的100Mbit/s的OABR的物理层互通
· IEEEP802.3bw 100BASE-T1 工作组于 2015年10月27日完成工作
· 标准发布于2016年1月
6.2 IEEE P802.3BP: 1000BASE-T1 Reduced Twisted Pair Gigabit Ethernet (RTPGE)
· 1000 Mbit/s 全双工
· 通过单个非屏蔽双绞线电缆通信(最长15米)
· 适应汽车环境(如:EMC:地发射/高抗干扰、适应高低温
· IEEEP802.3bp 1000BASE-T1 PHY 工作组于2016年6月30日完成工作
· 标准发布于2016年9月
6.3 IEEE P802.3BU: power over data lines (“PODL”)
· 目标:在100BASE-T1和1000BASE-T1上为终端设备供电
· 供电功率:0.5W到50W,依赖于供电电压(如,12V、48V)
· 标准发布于2017年1月
6.4 IEEE P802.3BV: Gigabit Ethernet over POF (Plastic Optional Fiber)
基于光纤的千兆以太网通信
· 目标:使用与MOST使用相同的光纤、LED和连接器实现1000Mbit/s通信
· 标准发布于2017年1月
更多精彩内容可关注微信公众号“激活未来”