net1. Reactor关键结构——EventLoop事件循环类
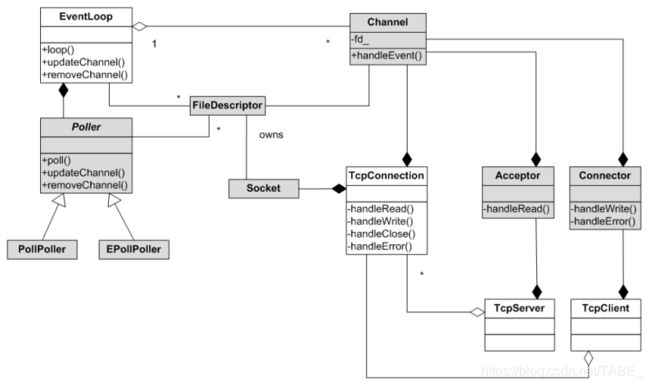
muduo的简化类图
时序图:

EventLoop类
- EventLoop事件循环类,是对事件循环的抽象。
- one loop per thread意思是说每个线程最多只能有一个EventLoop对象。
- EventLoop对象构造的时候,会检查当前线程是否已经创建了其他EventLoop对象,如果已创建,终止程序(LOG_FATAL)。
- EventLoop构造函数会记住本对象所属线程(threadId_)。
- 创建了EventLoop对象的线程称为IO线程,其功能是通过EventLoop::loop()运行事件循环(while循环)。
- 一个EventLoop可以有多个Channel和FileDescriptor。
- EventLoop::loop()主要有四个作用,按顺序处理定时器事件,IO多路复用检测,处理检测返回的活动通道事件,处理自己的额外消息事件
数据成员:
当前是否处于循环状态即是否在loop()函数中
bool looping_:当前是否处于循环状态即是否在loop()函数中 atomic
bool quit_:当前是否退出循环状态即是否退出loop()函数 atomic
bool eventHandling_:当前是否处于事件处理的状态 atomic
bool callingPendingFunctors_:当前是否处于调用pending函数的状态atomic
const pid_t threadId_:当前对象所属线程ID
Timestamp pollReturnTime_:调用poll()函数时所返回的时间戳
boost::scoped_ptr
boost::scoped_ptr
int wakeupFd_:用于eventfd所创建的文件描述符,线程间事件通知
boost::scoped_ptr
ChannelList activeChannels_:Poller返回的活动通道列表activeChannels_
Channel* currentActiveChannel_:当前正在处理的活动通道
MutexLock mutex_:互斥量mutex_
std::vector pendingFunctors_:该IO线程的任务队列,pending函数集合pendingFunctors_
typedef
typedef std::vector
成员函数:
EventLoop():构造函数,调用Poller::newDefaultPoller(this)初始化poller_对象
~EventLoop():析构函数
void loop():事件循环函数loop()该函数不能跨线程调用,只能在创建该对象的线程中调用
void quit():事件循环终止函数quit(),可以跨线程调用
Timestamp pollReturnTime() const :返回时间戳pollReturnTime_
void runInLoop(const Functor& cb):runInLoop()在I/O线程中执行某个回调函数,该函数可以跨线程调用,loop对象在其他线程中异步调用runInThread,则会调用queueInLoop将cb添加到该loop对象所属的IO线程
void queueInLoop(const Functor& cb):当调用者并非当前EventLoop所在线程时,将Functor存入EventLoop的任务队列
从而保证Functor由IO线程执行,这是线程安全的保证之一
TimerId runAt(const Timestamp& time, const TimerCallback& cb):在某个时刻运行定时器
TimerId runAfter(double delay, const TimerCallback& cb):过一段时间运行定时器
TimerId runEvery(double interval, const TimerCallback& cb):每隔一段时间运行定时器
void cancel(TimerId timerId):取消定时器
void wakeup():唤醒等待的线程
void updateChannel(Channel* channel):在Poller中添加或者更新通道
void removeChannel(Channel* channel):从Poller中移除通道
void assertInLoopThread():断言当前处于创建该对象的线程中
bool isInLoopThread() const :判断是否处于创建该EventLoop对象的线程
bool eventHandling() const:判断当前是否处于事件处理的状态
static EventLoop* getEventLoopOfCurrentThread():返回线程局部存储的当前线程指向的EventLoop对象的指针
void abortNotInLoopThread():终止程序
void handleRead():wakeupChannel_的ReadCallback()回调函数
void doPendingFunctors():调用pendingFunctors_里面的所有函数
void printActiveChannels() const:打印活动通道列表activeChannels_里的通道
EventLoop.h
// This is a public header file, it must only include public header files.
#ifndef MUDUO_NET_EVENTLOOP_H
#define MUDUO_NET_EVENTLOOP_H
#include EventLoop.cc
#include