C++并发编程(第二版)笔记
2章节 线程管控
class background_task
{
public:
void operator()() const
{
do_something();
do_something_else();
}
};
background_task f;
std::thread my_thread(f);
//这里的疑惑是为什么f是调用oprator()(),我知道他重载了(),那正常不应该是代入()
//std::thread my_thread(f())Error;
std::thread my_thread((background_task ()));//Correct
std::thread my_thread{background_task()};//Correct 初始化列表
//std::thread my_thread(background_task() ); Error
//参数带入了临时变量,编译器误以为是为声明函数
//返回值为std::thread 函数名为 my_thread 参数为background **这里注意写法**
**这里需要注意的是background_task f 传入的实参和形参是不一样的地址 **
#include在2.1.3中有讲叙到用try/catch 来进行一个异常保护的机制。但是此机制显得有点冗余。有点不太优雅。如下图
struct func;
void f{
int some_local_state=0;
func my_func(some_local_state);
std::thread t(my_func);
try{ //此处加了一个try保护,防止在当前线程的时候出现异常。然后t线程没join执行。
do_something_in_current_thread();
}
catch(...){
t.join();
throw;
}
t.join();
}
还有另外一种较为优雅点的方法就是使用RAII机制,即类资源回收。运用析构来进行join。
class thread_gurad
{
std::thread& t;
public:
explicit thread_guard(std::thread& _t):t(_t){};
~thread_guard(){
if(t.joinable()) //判断此函数是否能join 因为一个线程只能进行一次合并(join)
t.join;
}
thread_guard(thread_guard const&)=delete;
thread_guard& operator=(thread_guard const&)=delete;
}
struct func;
void f(){
int some_local_state=0;
func my_func(some_local_state);
std::thread t(my_func); //传入线程函数然后供线程进行回调。
thread_guard g(t); //创建一个RAII 的线程类,进行管理,当此f函数走完的时候。g类析构自动调用join
do_something_in_current_thread(); //执行当前所在线程需要操作的事情。
}
此方法即便do_something_in_current_thread 抛出异常,函数f()退出,以上行为仍会发生。
这里有个细节性的需注意一下,例下图:
void f(int i,std::string const& s); //这里的线程回调函数需要的是一个string 类型
void oops(int some_param)
{
char buffer[1024]; // 1
sprintf(buffer, "%i",some_param);
std::thread t(f,3,buffer); // 2 //这里传入的是一个指针,指向一个局部变量,很可能会出现
//当oops函数运行完成时,buff指向的局部变量会销毁,从而导致一些未定义的行为。
t.detach();
}
向线程函数传递参数的错误细节
void f(int i, std::string const& s) {
cout << s << endl;
};
void oops(int some_param)
{
char buffer[1024]; // 1
sprintf_s(buffer, "%i", some_param);
std::thread t(f, 3, string(buffer)); // 2
std::thread t(f, 3,buffer); // 2 ERROR 这里需要注意一个错误点就是这里传入了一个指针,然后oopes 结束的时候地址内的信息已经回收
// 线程回调f函数的时候已经拷贝不到buff指针内的值了,所以这个时候程序能运行但是并不能得到想要的结果。
//我们需要先提前转换成string(buffer);
t.detach();
}
int main() {
oops(3);
system("pause");
return 1;
}}
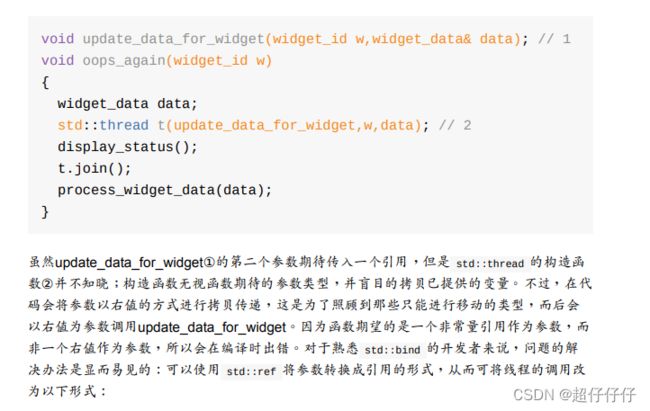
关于std::ref ,主要讲述的是在某些场景, 代入线程函数的时候线程需盲目的拷贝下列 int&a
但是const int&a 不允许拷贝,这个时候就需要用到std::ref了,这个就是将数值转换成引用类型
引用文中一句话:
#include如何传递参数为成员函数到线程中以及std::move 讲解也称作 移交线程归属权
#include个人小结:
这一章中主要是对于thread 的启动,等待的介绍。
3章节 线程间共享数据
3.1 互斥量
最基础的数据保存方式:互斥量
C++中通过实例化 std::mutex 创建互斥量实例,通过成员函数lock()对互斥量上锁,unlock() 进行解锁。。C++标准库为互斥量提供了一个RAII语法 的模板类 std::lock_guard,简单的互斥如下图
#include
#include some_list; 读写进行保护
std::mutex some_mutex; // 2
void add_to_list(int new_value) {
std::lock_guard<std::mutex> guard(some_mutex);
some_list.push_back(new_value);
}
bool list_contains(int value_to_find) {
std::lock_guard<std::mutex> guard(some_mutex);// 4 return
//std::lock_guard guard(some_mutex); 也可以写成这样,因为C++17上添加了类推导特性。
std::find(some_list.begin(),some_list.end(),value_to_find) != some_list.end(); }
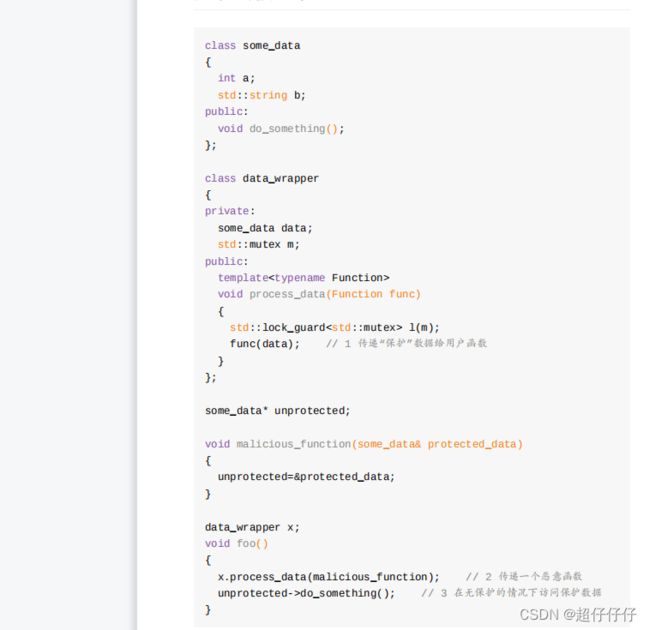
3.2 互斥保护,注意接口和指针破坏保护
3.3 定位接口间的条件竞争
互斥也会存在接口漏洞。看下列代码
template<typename T,typename Container=std::deque<T> >
class stack
{
public:
explicit stack(const Container&);
explicit stack(Container&& = Container());
template <class Alloc> explicit stack(const Alloc&);
template <class Alloc> stack(const Container&, const Alloc&); template <class Alloc> stack(Container&&, const Alloc&); template <class Alloc> stack(stack&&, const Alloc&);
bool empty() const;
size_t size() const;
T& top();
T const& top() const;
void push(T const&);
void push(T&&);
void pop();
void swap(stack&&);
template <class... Args> void emplace(Args&&... args);
};
也讲述到 智能上锁和解锁。std::unique_lock 以及std::lock_guard 的用法,unique_lock 相较于lock_guard 灵活。能自行进行加锁解锁的运行。
下列这段代码中大概讲解了移动构造传递mutex 给lk的过程,可以大概了解下。
#include这里穿插下移动构造的概念:我自已暂时的理解是把临时对象内的东西,拷贝给另外一个新对象。

详解:https://blog.csdn.net/sinat_25394043/article/details/78728504
下列代码展示的是双重检查锁。但是此方法会存在一定问题。
void undefined_behaviour_with_double_checked_locking()
{
if(!resource_ptr) // 1
{
std::lock_guard<std::mutex> lk(resource_mutex);
//多线程情况下,很容易产生问题,因为线程A获得所有权,执行new未完成时。
//线程B,这个时候知道resource_ptr不为nullptr ,然后直接执行do_something ,
//但是这个时候由于线程A并未new完成,所以do_something 执行的时候会出现问题。
//!!!!!!!!!!!!!!!!!!!!!!!!!!
if(!resource_ptr) // 2
{
resource_ptr.reset(new some_resource); // 3
}
}
resource_ptr->do_something(); // 4
}
详解:https://blog.csdn.net/qq_32907195/article/details/108714662
4章节 同步并发操作
4.1 等待一个事件(std::this_thread::sleep_for)
bool flag;
std::mutex m;
void wait_for_flag()
{
std::unique_lock<std::mutex> lk(m);
while(!flag)
{
lk.unlock();
std::this_thread::sleep_for(std::chrono::milliseconds(100));
lk.lock();
}
//代码片段中主要是讲述了 std::this_thread::sleep_for 线程休眠的用法。
4.1.1 等待条件达成 条件变量(std::condition_variable)
std::mutex mut;
std::queue<data_chunk> data_queue;
std::condition_variable data_cond;
void data_preparation_thread()
{
while(more_data_to_prepare())
{
data_chunk const data=prepare_data();
std::lock_guard<std::mutex> lk(mut);
data_queue.push(data);
data_cond.notify_one();
}
}
void data_processing_thread()
{
while(true)
{
std::unique_lock<std::mutex> lk(mut);
data_cond.wait(
lk,[]{return !data_queue.empty();});
data_chunk data=data_queue.front();
data_queue.pop();
lk.unlock();
process(data);
if(is_last_chunk(data))
break;
}
}
这里可以记录下condition_variable的流程主要看wait 这个函数。
wait()成员函数 这里第二个参数缺省参数为false。
第二个参数为false时。wait对互斥量进行解锁,然后该段函数一直阻塞,等待notify_one 的唤醒。唤醒wait之后,会重新一直拿锁(mutex)如果拿不到则一直卡再wait()处拿锁,若拿到了,则继续往下执行。
第二个参数为true时,流程继续往下走,等该段程序结束时,再解锁。
4.21 后台任务的返回值(future,async)
async 大概意思是重新开辟一条异步线程。内部加载了std::promise、std::packaged_task加上std::thread。
#include std::async 传参的方法
#include 4.2.2 任务与期望值关联(std::packaged_task<>)
std::packaged_task 的简单理解的话就是用来包装于一个函数,然后返回一个future 对象,里面有函数的返回值。文中示例如下:
#include 4.2.3 使用(std::)promises
这个的理解是能作为一个储存的容器供线程使用
//参考别人的代码进行理解。
#include 4.2.4 将异常存与期望值中
没太看明白,~~~~~
4.2.5 多个线程的等待( std::shared_future)
我的理解是shard_future 和futute 的区别在于,future 是移动语义,只能wait调用一次,调用两次会抛异常,shard_future 是拷贝的,wait()可以多次调用。然后具体其他的区别暂时没分析到。
4.3 限定等待时间
C11 中提供了 时间函数用法内有三个函数。
std::chrono::steady_clock () 只记录时间增长,相当于一个教练的秒表
system_clock () 系统的时钟可以修改;甚至可以网络对时; 所以用系统时间计算时间差可能不准。
high_resolution_clock () 是当前系统能够提供的最高精度的时钟;它也是不可以修改的。相当于 steady_clock 的高精度版本。
#include 工作中我们可以写到宏上作为一个预处理指令,简化程序,
#define _CRT_SECURE_NO_WARNINGS
#include 4.31 时钟( std::chrono::high_resolution_clock ::now())
介绍now 的用法,,获取当前时钟 now(),返回一个 std::chrono::time_point类型。;
4.32 时延( std::chrono::duration<>)
**第一个参数是变量类型,第二个参数是 用的是std::ratio 模板,缺省为std::ratio <1> 1s

https://blog.csdn.net/t114211200/article/details/78029553**
4.4 使用同步操作简化代码
FP模式快排
#include
#include FP并行模式的快排 这里暂未理解:https://blog.csdn.net/clh01s/article/details/78631369
//并发版本快排
/*
* FP_sort.cpp
*
* Created on: Nov 23, 2017
* Author: [email protected]
* FP模式的快速排序以及使用future的并发快速排序
*/
#include
#include l;
l.push_back(1);
l.push_back(2);
l.push_back(5);
l.push_back(8);
l.push_back(3);
l.push_back(9);
l.push_back(11);
l.push_back(4);
l.push_back(6);
l.push_back(10);
l.push_back(7);
l.push_back(12);
std::list sort = parallel_quick_sort_future(l);
for(auto it = sort.begin();it != sort.end();++it)
{
std::cout<<*it<
5章 C++内存模型和原子类型操作
前面有些过于啰嗦的就没去记录
5.2.2 std::atomic_flag的相关操作
atomic_flag 简单的例程。 而且在工程种用得相对较少
主要是test_and_set() 和 clear()这两个函数
#include 5.2.3 std::atomic 的相关操作
std::atomic<bool> b; //默认为false
bool x = b.load(std::memory_order_acquire); //加载操作,给bool x 加载原子操作b
b.store(true); //b读取 true;
x = b.exchange(true, std::memory_order_acq_rel); //读写加载,返回原来的值
5.2.4 std::atomic :指针运算
class Foo {}; //空类字节大小为1
Foo some_array[5];
std::atomic<Foo*> p(some_array);
Foo* x = p.fetch_add(2); // p加2,并返回原始值
assert(x == some_array);
assert(p.load() == &some_array[2]);
x = (p -= 1); // p减1,并返回原始值
assert(x == &some_array[1]);
assert(p.load() == &some_array[1]);
5.3.1 同步发生
5.3.2 先行发生
#include 5.3.3 原子操作的内存顺序
//内存模型中的同步模式】 memory model synchronization modes
typedef enum memory_order {
memory_order_relaxed, // 【宽松模式】 不对执行顺序做保证
memory_order_acquire, // 【获得模式】本线程中,所有后续的读操作必须在本条原子操作完成后执行
memory_order_release, // 【释放模式】本线程中,所有之前的写操作完成后才能执行本条原子操作
memory_order_acq_rel, // 【获得/释放模式】 同时包含 memory_order_acquire 和 memory_order_release
memory_order_consume, // 【消费模式】本线程中,所有后续的有关本原子类型的操作,必须在本条原子操作完成之后执行
memory_order_seq_cst // 【顺序一致模式】 sequentially consistent,全部存取都按顺序执行
} memory_order;
上文6种内存模式从书本中不好理解。下面结合代码历程测试。
1- memory_order_relaxed
有点没想通先跳过。