经纬度坐标转平面直角坐标——高斯投影python/c#实现
高斯投影正算公式来自《大地测量学第二版》,作者孔祥元

公式中各个参数的含义,详见博客:https://blog.csdn.net/du12300/article/details/109307386
实现代码如下,为了避免出现负的横坐标,可在Y上加上500000m
import numpy as np
import pandas as pd
import math
class Point:
def __init__(self, type=0):
self.B = 0
self.L = 0
self.H = 0
##### 椭球参数
# CGCS2000
if type == 1:
self.a = 6378137
self.f = 1 / 298.257222101
## 西安80
elif type == 2:
self.a = 6378140
self.f = 1 / 298.257
## 北京54
elif type == 3:
self.a = 6378245
self.f = 1 / 298.3
## WGS-84
else:
self.a = 6378137
self.f = 1 / 298.257223563
self.b = self.a * (1 - self.f)
self.e = math.sqrt(self.a * self.a - self.b * self.b) / self.a ##第一偏心率
self.e2 = math.sqrt(self.a * self.a - self.b * self.b) / self.b ##第二偏心率
self.d2r = math.pi / 180
def SetBLH_DMS(self, degree_L=0.0, minutes_L=0.0, second_L=0.0, degree_B=0.0, minutes_B=0.0, second_B=0.0, H_=0.0):
## 度分秒化为 度.度
self.L = (degree_L + minutes_L / 60.0 + second_L / 3600.0)
self.B = (degree_B + minutes_B / 60.0 + second_B / 3600.0)
self.H = H_
def SetBLH_D(self, B, L, H=0):
## 经纬度格式是 度.度
self.L = L
self.B = B
self.H = H
def GaussProjection(self):
L0 = 114 ##中央子午线,这里是3度带的取法,6度带注意修改这里
rho = 180 / math.pi # 单位是度.度
l = (self.L - L0) / rho ## 公式中的参数 l
cB = math.cos(self.B * self.d2r)
sB = math.sin(self.B * self.d2r)
self.N = self.a / math.sqrt(1 - self.e * self.e * sB * sB) ## 卯酉圈曲率半径
self.t = math.tan(self.B * self.d2r) ##tanB 对应公式中的参数t
self.eta = self.e2 * cB ## 对应公式中的参数 eta
m0 = self.a * (1 - self.e * self.e)
m2 = 3.0/2.0 * self.e * self.e * m0
m4 = 5.0/4.0 * self.e * self.e * m2
m6 = 7.0/6.0 * self.e * self.e * m4
m8 = 9.0/8.0 * self.e * self.e * m6
a0 = m0 + 1.0/2.0 * m2 + 3.0/8.0 * m4 + 5.0/16.0 * m6 + 35.0/128.0 * m8
a2 = 1.0/2.0 * m2 + 1.0/2.0 * m4 + 15.0/32.0 * m6 + 7.0/16.0 * m8
a4 = 1.0/8.0 * m4 + 3.0/16.0 * m6 + 7.0/32.0 * m8
a6 = 1.0/32.0 * m6 + 1.0/16.0 * m8
a8 = 1.0/128.0 * m8
s2b = math.sin(self.B * self.d2r * 2)
s4b = math.sin(self.B * self.d2r * 4)
s6b = math.sin(self.B * self.d2r * 6)
s8b = math.sin(self.B * self.d2r * 8)
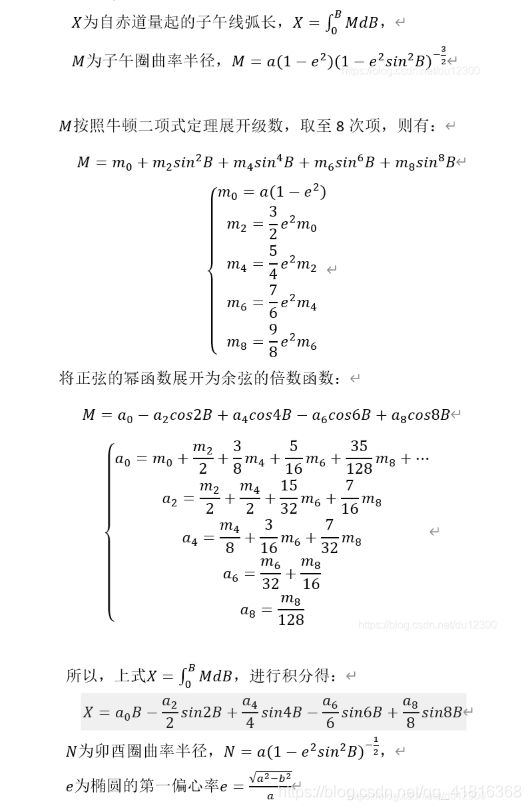
## X为自赤道量起的子午线弧长
self.X = a0 * (self.B * self.d2r) - 1.0/2.0 * a2 * s2b + 1.0/4.0 * a4 * s4b - 1.0/6.0 * a6 * s6b + 1.0/8.0 * a8 * s8b
## 坐标X
self.xs = self.X + self.N / 2 * self.t * cB * cB * l * l + self.N / 24 * self.t * (5 - self.t * self.t + 9 * math.pow(self.eta, 2) + 4 * math.pow(self.eta, 4)) * math.pow(cB, 4) * math.pow(l, 4) \
+ self.N / 720 * self.t * (61 - 58 * self.t * self.t + math.pow(self.t, 4)) * math.pow(cB, 6) * math.pow(l, 6)
## 坐标Y
self.ys = self.N * cB * l + self.N / 6 * (1 - self.t * self.t + self.eta * self.eta) * math.pow(cB, 3) * math.pow(l, 3) \
+ self.N / 120 * (5 - 18 * self.t * self.t + math.pow(self.t, 4) + 14 * math.pow(self.eta, 2) - 58 * self.eta * self.eta * self.t * self.t) * math.pow(cB, 5) * math.pow(l, 5) + 500000
self.hs = self.H
self.xyh_vector = [[self.xs],
[self.ys],
[self.hs]]
self.xyh_vector = np.array(self.xyh_vector)
if __name__ == "__main__":
rawData = pd.read_csv(r"2020.csv")
numberOfPoint = 10 # 选取多少个点计算
for i in range(numberOfPoint):
L_txt = str(rawData.iat[i, 4])
L_degree = float(L_txt[:3])
L_minute = float(L_txt[4:6])
L_second = float(L_txt[6:8] + "." + L_txt[8:])
B_txt = str(rawData.iat[i, 3])
B_degree = float(B_txt[:3])
B_minute = float(B_txt[3:5])
B_second = float(B_txt[5:7] + "." + B_txt[7:])
H = float(rawData.iat[i, 5])
p = Point(type=1)
p.SetBLH_DMS(L_degree, L_minute, L_second, B_degree, B_minute, B_second, H)
p.GaussProjection()
print(p.xyh_vector[0], p.xyh_vector[1])
print(" ")
C#实现,C#矩阵运算库
using MathNet.Numerics.LinearAlgebra;
using MathNet.Numerics.LinearAlgebra.Double;
using System;
using System.Collections.Generic;
using System.Linq;
using System.Text;
using System.Threading.Tasks;
using MathNet.Numerics.LinearAlgebra;
using MathNet.Numerics.LinearAlgebra.Double;
namespace BLHToLocal
{
public class Point
{
//纬度 经度 高度
public double B, L, H;
// 长半轴 短半轴 扁率 第一偏心率 第二偏心率
public double a, b, f, e, e2, d2r = Math.PI / 180;
//中央子午线
public double L0 = 114;
public double rho = 180 / Math.PI;
public double l;
//平面坐标系X1 Y1 H
public double xs, ys, hs;
// 椭球参数设置
public void EllipsoidParam(string type = "WGS-84", double L0_ = 114)
{
// CGCS2000 椭球参数
if (type == "CGCS2000")
{
this.a = 6378137;
this.f = 1 / 298.257222101;
this.L0 = L0_;
}
// 西安 80
else if (type == "西安80")
{
this.a = 6378140;
this.f = 1 / 298.257;
this.L0 = L0_;
}
// 北京 54
else if (type == "北京54")
{
this.a = 6378245;
this.f = 1 / 298.3;
this.L0 = L0_;
}
// WGS-84
else
{
this.a = 6378137;
this.f = 1 / 298.257223563;
this.L0 = L0_;
}
this.b = this.a * (1 - this.f);
this.e = Math.Sqrt(this.a * this.a - this.b * this.b) / this.a; //第一偏心率
this.e2 = Math.Sqrt(this.a * this.a - this.b * this.b) / this.b; //第二偏心率
}
// 以度分秒的形式输入经纬度
public void SetBLH_DMS(double degree_L=0.0, double minutes_L=0.0, double second_L=0.0, double degree_B=0.0, double minutes_B=0.0, double second_B=0.0, double H_=0.0)
{
this.L = (degree_L + minutes_L / 60.0 + second_L / 3600.0);
this.B = (degree_B + minutes_B / 60.0 + second_B / 3600.0);
this.H = H_;
}
//以 度.度 的形式输入经纬度
public void SetBLH_Degree(double B_, double L_, double H_=0.0)
{
this.L = L_;
this.B = B_;
this.H = H_;
}
//高斯投影
public void GaussProjection(string type = "WGS-84", double L0_ = 114)
{
this.EllipsoidParam(type, L0_);
double l = (this.L - this.L0) / this.rho;
double cB = Math.Cos(this.B * this.d2r);
double sB = Math.Sin(this.B * this.d2r);
double s2b = Math.Sin(this.B * this.d2r * 2);
double s4b = Math.Sin(this.B * this.d2r * 4);
double s6b = Math.Sin(this.B * this.d2r * 6);
double s8b = Math.Sin(this.B * this.d2r * 8);
double N = this.a / Math.Sqrt(1 - this.e * this.e * sB * sB); // 卯酉圈曲率半径
double t = Math.Tan(this.B * this.d2r);
double eta = this.e2 * cB;
double m0 = this.a * (1 - this.e * this.e);
double m2 = 3.0 / 2.0 * this.e * this.e * m0;
double m4 = 5.0 / 4.0 * this.e * this.e * m2;
double m6 = 7.0 / 6.0 * this.e * this.e * m4;
double m8 = 9.0 / 8.0 * this.e * this.e * m6;
double a0 = m0 + 1.0 / 2.0 * m2 + 3.0 / 8.0 * m4 + 5.0 / 16.0 * m6 + 35.0 / 128.0 * m8;
double a2 = 1.0 / 2.0 * m2 + 1.0 / 2.0 * m4 + 15.0 / 32.0 * m6 + 7.0 / 16.0 * m8;
double a4 = 1.0 / 8.0 * m4 + 3.0 / 16.0 * m6 + 7.0 / 32.0 * m8;
double a6 = 1.0 / 32.0 * m6 + 1.0 / 16.0 * m8;
double a8 = 1.0 / 128.0 * m8;
// X1为自赤道量起的子午线弧长
double X1 = a0 * (this.B * this.d2r) - 1.0 / 2.0 * a2 * s2b + 1.0 / 4.0 * a4 * s4b - 1.0 / 6.0 * a6 * s6b + 1.0 / 8.0 * a8 * s8b;
this.xs = X1 + N / 2 * t * cB * cB * l * l + N / 24 * t * (5 - t * t + 9 * Math.Pow(eta, 2) + 4 * Math.Pow(eta, 4)) * Math.Pow(cB, 4) * Math.Pow(l, 4)
+ N / 720 * t * (61 - 58 * t * t + Math.Pow(t, 4)) * Math.Pow(cB, 6) * Math.Pow(l, 6);
this.ys = N * cB * l + N / 6 * (1 - t * t + eta * eta) * Math.Pow(cB, 3) * Math.Pow(l, 3)
+ N / 120 * (5 - 18 * t * t + Math.Pow(t, 4) + 14 * Math.Pow(eta, 2) - 58 * eta * eta * t * t) * Math.Pow(cB, 5) * Math.Pow(l, 5) + 500000;
this.hs = this.H;
}
// 添加偏差补偿
public void DeviationCompensate(double x_devi, double y_devi)
{
this.xs += x_devi;
this.ys += y_devi;
}
//坐标转换
public double[] CoordinateTranfer(NanaParam nnp)
{
Matrix R = DenseMatrix.OfArray(new double[,] {
{ 1, nnp.omigaZ, -nnp.omigaY },
{ -nnp.omigaZ, 1, nnp.omigaX },
{ nnp.omigaY, -nnp.omigaX, 1 } });
var deltaMove = new DenseVector(new[] { nnp.deltaX, nnp.deltaY, nnp.deltaZ });
var coor1 = new DenseVector(new[] { this.xs, this.ys, this.hs });
var coor2 = (1 + nnp.m) * R * coor1 + deltaMove;
double[] result = new double[3] { coor2[0], coor2[1], coor2[2] };
return result;
}
}
public class NanaParam
{
//X1 Y1 Z1 表示坐标系1中坐标 X2 Y2 Z2 表示坐标系2中坐标
public List X1 = new List();
public List Y1 = new List();
public List Z1 = new List();
public List X2 = new List();
public List Y2 = new List();
public List Z2 = new List();
//七参数 三个平移参数 三个旋转参数 一个尺度参数m
public double deltaX, deltaY, deltaZ, omigaX, omigaY, omigaZ, m;
public void Add(double x1, double y1, double z1, double x2, double y2, double z2)
{
this.X1.Add(x1);
this.Y1.Add(y1);
this.Z1.Add(z1);
this.X2.Add(x2);
this.Y2.Add(y2);
this.Z2.Add(z2);
}
public void Solve()
{
var G = new DenseMatrix(X2.Count * 3, 7);
var P = new DenseMatrix(X2.Count * 3, 1);
for (int i = 0; i < X2.Count; i++)
{
G[3 * i, 0] = 1;
G[3 * i, 1] = 0;
G[3 * i, 2] = 0;
G[3 * i, 3] = X1[i];
G[3 * i, 4] = 0;
G[3 * i, 5] = -Z1[i];
G[3 * i, 6] = Y1[i];
G[3 * i + 1, 0] = 0;
G[3 * i + 1, 1] = 1;
G[3 * i + 1, 2] = 0;
G[3 * i + 1, 3] = Y1[i];
G[3 * i + 1, 4] = Z1[i];
G[3 * i + 1, 5] = 0;
G[3 * i + 1, 6] = -X1[i];
G[3 * i + 2, 0] = 0;
G[3 * i + 2, 1] = 0;
G[3 * i + 2, 2] = 1;
G[3 * i + 2, 3] = Z1[i];
G[3 * i + 2, 4] = -Y1[i];
G[3 * i + 2, 5] = X1[i];
G[3 * i + 2, 6] = 0;
P[3 * i, 0] = X2[i];
P[3 * i + 1, 0] = Y2[i];
P[3 * i + 2, 0] = Z2[i];
}
var G_T = G.Transpose();
var K = G_T * G;
var X = K.Inverse() * (G_T * P);
this.deltaX = X[0, 0];
this.deltaY = X[1, 0];
this.deltaZ = X[2, 0];
this.m = X[3, 0] - 1;
this.omigaX = X[4, 0] / X[3, 0];
this.omigaY = X[5, 0] / X[3, 0];
this.omigaZ = X[6, 0] / X[3, 0];
}
public void SetNanaParam(double deltaX_, double deltaY_, double deltaZ_, double omigaX_, double omigaY_, double omigaZ_, double m_)
{
this.deltaX = deltaX_;
this.deltaY = deltaY_;
this.deltaZ = deltaZ_;
this.omigaX = omigaX_;
this.omigaY = omigaY_;
this.omigaZ = omigaZ_;
this.m = m_;
}
}
}