opencv LSD直线算法的实战 c++
网上c++的opencv教程太少了
刚好我今天花了一下午部署了opencv环境,用上了LSD算法,效果不错,故分享给大家
核心流程:下载源码,外挂contrib后编译opencv。再使用里面的LSD库
问:contrib是什么?
答:contrib是opencv的附加第三方库,有很多先进的算法
LSD直线检测算法的介绍:
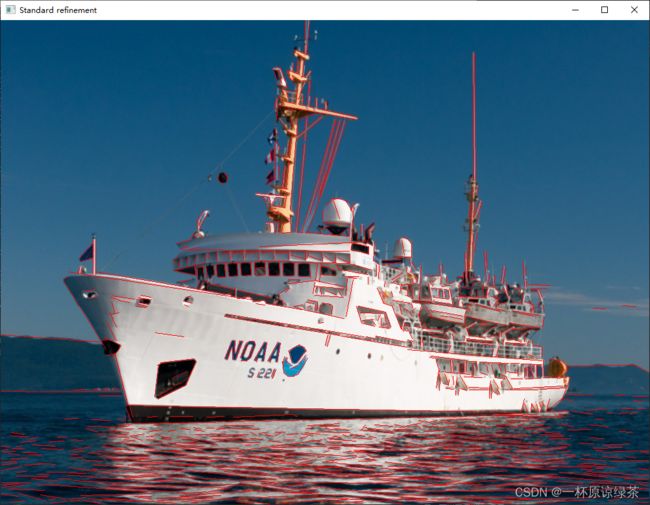
LSD是2010年新推出的算法,相比起1962年的Hough霍夫检测算法,它先进一大截,有成功率高,可以检测出直线的长度的优点
可以参考这个文章:OpenCV直线检测算法汇总
https://blog.csdn.net/weixin_46838716/article/details/125492966
直线检测汇总
效果展示:
contrib编译安装
参考这个链接:
VS编译OpenCV + Contrib
预计花费时间:2小时
最后只需要那个install文件夹就行
我把那个文件夹传到网盘了 网盘链接
重点在于添加这两个库的地址


(如果还有错误,我也不会。。)
示例程序
#include如果你想调参,也可以用以下代码
调参代码:
double scale = 0.8,
double sigma_scale = 0.6, double quant = 2.0, double ang_th = 22.5,
double log_eps = 0, double density_th = 0.7, int n_bins = 1024;
Ptr<LineSegmentDetector> lsd = createLineSegmentDetector(LSD_REFINE_NONE,
scale,
sigma_scale,
quant, ang_th,
log_eps,
density_th,
n_bins);
vector<Vec4f> lines;
//进入检测直线算法
lsd->detect(grayImage, lines);
参考链接:https://blog.csdn.net/thequitesunshine007/article/details/116382216
其他优化方法
推荐使用局部直方图均衡,
参考链接
再推荐下我使用的模糊算法,用来消除瑕疵
//我称之为模糊的三明治结构,效果很好
blur(image, image, Size(5, 5)); //平均模糊用来平滑边缘
GaussianBlur(image, image, Size(5, 5), 0, 0);//高斯模糊用来消除瑕疵点
blur(image, image, Size(5, 5));