FreeRtos快速入门
堆和栈
堆
- 堆即为一块空闲的内存,从这块内存中来取出一部分用完之后再把它释放回去
//此时heap_buf就相当于一块空闲的内存
//我们只需要在它上面实现内存的分配和释放,那么它就是一个堆
char heap_buf[1024];
int pos = 0; //指针(指向空闲内存的位置)
//分配空间
void * my_malloc(int size)
{
int old_pos = pos; //旧的下标
pos += size; //下标更新
return &heap_buf[old_pos]; //分配空间(返回首地址)
}
//释放分配出去的某一块内存(因为此时是没法释放的,所以就没写代码,意识一下即可)
void my_free(void * size)
{
/* err */
}
int main(void)
{
int i;
char * buf = my_malloc(100); //分配100个字节的空间
unsigned char uch = 200;
for(i=0;i<26;i++)
{
buf[i] = 'A' + i;
}
}
此时heap_buf就有数据了,并且下一次分配空间的时候,是从地址100开始分配的,因为pos指向100
栈
- 栈(stack)又名堆栈,它是一种运算受限的线性表。限定仅在表尾进行插入和删除操作的线性表。这一端被称为栈顶,相对地,把另一端称为栈底。向一个栈插入新元素又称作进栈、入栈或压栈,它是把新元素放到栈顶元素的上面,使之成为新的栈顶元素;从一个栈删除元素又称作出栈或退栈,它是把栈顶元素删除掉,使其相邻的元素成为新的栈顶元素。
void c_fun(void)
{
;
}
void b_fun(void)
{
;
}
int a_fun(int val)
{
int a = 8;
a += val;
b_fun();
c_fun();
return a;
}
int main(void)
{
a_fun(40);
return 0;
}
基本知识:
- 返回地址:可以理解为返回地址就是该函数执行结束后的下一条指令
在main函数中,a函数执行完之后将会返回到return 0中
a函数中调用函数b,当b函数执行之后将会返回到c函数调用前,c函数执行完之后返回到return a中
在c语言中,上面过程我们一目了然就知道了它返回的地址是谁,但这个返回地址保存在哪里呢?
1、返回地址保存在哪?
- 返回地址保存在栈中
- main在调用a_fun前会做两两件事情:
- 将a的返回地址(return 0的地址)保存到一个寄存器里面LR(link Register)
- 调用a_fun
- 那么a_fun里面调用b_fun之前,就要先把b_fun的返回地址(c_fun)保存到LR里面,之后在调用b_fun
2.那么在a_fun里面保存的LR会不会覆盖之前LR的数据呢?如果不会,LR里面是如何处理的?
- LR并不会被覆盖
- 在a_fun内部会做一件事情:
- 把LR的值(main里面的return 0的地址)存入栈中
- 同样道理,b_fun的内部也会将LR的值(c_fun的地址)存入栈中,b_fun执行完就会开始执行c_fun
- 当c_fun执行完,就会取出c_fun保存的LR值,并跳过去执行(return a),a函数也一样,最终跳到main函数的return 0
C函数开头:
- 划分栈(LR等寄存器、局部变量)
- 将LR等寄存器存入栈
- 执行代码
- 如代码里面有a = 8的话,会先把a在栈里面划分空间,之后再把8这个值写到栈中
官方精简的第1个FreeRtos程序
-
下载
-
删减目录
-
编译、执行
-
添加串口打印功能
- 去掉无关的代码:如LCD等
- 增加串口打印功能
- 初始化串口
- 实现fputc
serial.c
#include "FreeRTOS.h"
#include "queue.h"
#include "semphr.h"
#include main.c
int main( void )
{
#ifdef DEBUG
debug();
#endif
prvSetupHardware();
printf("Hello World\r\n");
/* Start the scheduler. */
vTaskStartScheduler();
/* Will only get here if there was not enough heap space to create the
idle task. */
return 0;
}
static void prvSetupHardware( void )
{
/* Start with the clocks in their expected state. */
RCC_DeInit();
/* Enable HSE (high speed external clock). */
RCC_HSEConfig( RCC_HSE_ON );
/* Wait till HSE is ready. */
while( RCC_GetFlagStatus( RCC_FLAG_HSERDY ) == RESET )
{
}
/* 2 wait states required on the flash. */
*( ( unsigned long * ) 0x40022000 ) = 0x02;
/* HCLK = SYSCLK */
RCC_HCLKConfig( RCC_SYSCLK_Div1 );
/* PCLK2 = HCLK */
RCC_PCLK2Config( RCC_HCLK_Div1 );
/* PCLK1 = HCLK/2 */
RCC_PCLK1Config( RCC_HCLK_Div2 );
/* PLLCLK = 8MHz * 9 = 72 MHz. */
RCC_PLLConfig( RCC_PLLSource_HSE_Div1, RCC_PLLMul_9 );
/* Enable PLL. */
RCC_PLLCmd( ENABLE );
/* Wait till PLL is ready. */
while(RCC_GetFlagStatus(RCC_FLAG_PLLRDY) == RESET)
{
}
/* Select PLL as system clock source. */
RCC_SYSCLKConfig( RCC_SYSCLKSource_PLLCLK );
/* Wait till PLL is used as system clock source. */
while( RCC_GetSYSCLKSource() != 0x08 )
{
}
/* Enable GPIOA, GPIOB, GPIOC, GPIOD, GPIOE and AFIO clocks */
RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOA | RCC_APB2Periph_GPIOB |RCC_APB2Periph_GPIOC
| RCC_APB2Periph_GPIOD | RCC_APB2Periph_GPIOE | RCC_APB2Periph_AFIO, ENABLE );
/* SPI2 Periph clock enable */
RCC_APB1PeriphClockCmd( RCC_APB1Periph_SPI2, ENABLE );
/* Set the Vector Table base address at 0x08000000 */
NVIC_SetVectorTable( NVIC_VectTab_FLASH, 0x0 );
NVIC_PriorityGroupConfig( NVIC_PriorityGroup_4 );
/* Configure HCLK clock as SysTick clock source. */
SysTick_CLKSourceConfig( SysTick_CLKSource_HCLK );
SerialPortInit(); //初始化串口1
}
第1个FreeRtos程序及引申
1.创建两个打印任务
- FreeRtos是多任务系统,这个多任务在我们人类感觉上来说是同时执行的,但其实是交叉执行的
void task1Function(void * Parameters)
{
while(1)
{
printf("1");
}
}
void task2Function(void * Parameters)
{
while(1)
{
printf("2");
}
}
/*-----------------------------------------------------------*/
int main( void )
{
//句柄(可以理解为一个任务的唯一标识)
TaskHandle_t xTaskHandle1; //创建任务1的句柄
#ifdef DEBUG
debug();
#endif
prvSetupHardware();
printf("Hello World\r\n");
/*
* pxTaskCode:函数
* pcName:任务名字
* usStackDepth:栈深度
* pvParameters:参数(给pxTaskCode函数用的)
* uxPriority:优先级
* pxCreatedTask:句柄
*/
//xTaskCreate(pxTaskCode,pcName,usStackDepth,pvParameters,uxPriority,pxCreatedTask);
//倘若任务1和任务2是在同一个串口输出的,那么就会交叉使用串口
//下面结果为:222222222222111111111112222222222221111111111122222222222211111111111
xTaskCreate(task1Function,"Task1",100,NULL,1,&xTaskHandle1); //创建任务1
xTaskCreate(task2Function,"Task2",100,NULL,1,NULL); //创建任务2
//FreeRtos是多任务系统,这个多任务在我们人类感觉上来说,是同时执行的,但其实是交叉执行的
//倘若任务1和任务2是不同的串口输出的,那么就会发现任务1和任务2“好像”是在同时执行的
//再比如添加一个LED闪烁任务,那么串口输出和LED闪烁“好像是同时执行的”
/* Start the scheduler. */
vTaskStartScheduler();
/* Will only get here if there was not enough heap space to create the
idle task. */
return 0;
}
2.FreeRtos源码结构
结构
以Keil工具下STM32F103芯片为例,它的FreeRTOS的目录如下:
主要涉及2个目录:
-
Demo
-
Demo目录下是工程文件,以"芯片和编译器"组合成一个名字
-
比如:CORTEX_STM32F103_Keil
-
-
Source
- 根目录下是核心文件,这些文件是通用的
- portable目录下是移植时需要实现的文件
- 目录名为:[compiler]/[architecture]
- 比如:RVDS/ARM_CM3,这表示cortexM3架构在RVDS工具上的移植文件
核心文件
FreeRTOS的最核心文件只有2个:
- FreeRTOS/Source/tasks.c
- FreeRTOS/Source/list.c
其他文件的作用也一起列表如下:
| FreeRTOS/Source/下的文件 | 作用 |
|---|---|
| tasks.c | 必需,任务操作 |
| list.c | 必须,列表 |
| queue.c | 基本必需,提供队列操作、信号量(semaphore)操作 |
| timer.c | 可选,software timer |
| event_groups.c | 可选,提供event group功能 |
| croutine.c | 可选,过时了 |
3.编程规范
数据类型
每个移植的版本都含有自己的 portmacro.h 头文件,里面定义了2个数据类型:
- TickType_t:
- FreeRTOS配置了一个周期性的时钟中断:Tick Interrupt
- 每发生一次中断,中断次数累加,这被称为tick count
- tick count这个变量的类型就是TickType_t
- TickType_t可以是16位的,也可以是32位的
- FreeRTOSConfig.h中定义configUSE_16_BIT_TICKS时,TickType_t就是uint16_t
- 否则TickType_t就是uint32_t
- 对于32位架构,建议把TickType_t配置为uint32_t
- BaseType_t:
- 这是该架构最高效的数据类型
- 32位架构中,它就是uint32_t
- 16位架构中,它就是uint16_t
- 8位架构中,它就是uint8_t
- BaseType_t通常用作简单的返回值的类型,还有逻辑值,比如 pdTRUE/pdFALSE
变量名
变量名有前缀:
| 变量名前缀 | 含义 |
|---|---|
| c | char |
| s | int16_t,short |
| l | int32_t,long |
| x | BaseType_t,其他非标准的类型:结构体、task handle、queue handle等 |
| u | unsigned |
| p | 指针 |
| uc | uint8_t,unsigned char |
| pc | char指针 |
函数名
函数名的前缀有2部分:返回值类型、在哪个文件定义
| 函数名前缀 | 含义 |
|---|---|
| vTaskPrioritySet | 返回值类型:void 在task.c中定义 |
| xQueueReceive | 返回值类型:BaseType_t 在queue.c中定义 |
| pvTimerGetTimerID | 返回值类型:pointer to void 在tmer.c中定义 |
宏的名
宏的名字是大小,可以添加小写的前缀。前缀是用来表示:宏在哪个文件中定义。
| 宏的前缀 | 含义:在哪个文件里定义 |
|---|---|
| port (比如portMAX_DELAY) | portable.h或portmacro.h |
| task (比如taskENTER_CRITICAL()) | task.h |
| pd (比如pdTRUE) | projdefs.h |
| config (比如configUSE_PREEMPTION) | FreeRTOSConfig.h |
| err (比如errQUEUE_FULL) | projdefs.h |
通用的宏定义如下:
| 宏 | 值 |
|---|---|
| pdTRUE | 1 |
| pdFALSE | 0 |
| pdPASS | 1 |
| pdFAIL | 0 |
创建任务详解
动态_静态创建任务
-
对于每个任务都会有一个TCB_t结构体,对于TCB_t结构体我们可以选择动态分配或者静态分配
-
使用xTaskCreate函数创建的任务和栈都是动态分配的
-
一个任务可以简单的理解为是一个函数,在xTaskCreate函数中,我们还指定了栈的大小,因为在函数中有各种局部变量,以及各种调用,所以每一个任务的栈应该都不一样的,否则它们的栈会互相冲突,并且这个栈我们还可以静态分配
代码
void task1Function(void * Parameters)
{
while(1)
{
printf("1");
}
}
void task2Function(void * Parameters)
{
while(1)
{
printf("2");
}
}
void task3Function(void * Parameters)
{
while(1)
{
printf("3");
}
}
/*-----------------------------------------------------------*/
//创建一个栈空间
StackType_t xTask3Stack[100]; //这里100的话深度(usStackDepth)也得写100
//创建TCB
StaticTask_t xTask3TCB;
//创建一个空闲任务
StackType_t xIdleTaskStack[100];
StaticTask_t xIdleTaskTCB;
//想要调用xTaskCreateStatic的话得要实现vApplicationGetIdleTaskMemory函数
void vApplicationGetIdleTaskMemory( StaticTask_t ** ppxIdleTaskTCBBuffer,
StackType_t ** ppxIdleTaskStackBuffer,
uint32_t * pulIdleTaskStackSize )
{
*ppxIdleTaskTCBBuffer = &xIdleTaskTCB;
*ppxIdleTaskStackBuffer = xIdleTaskStack;
*pulIdleTaskStackSize = 100;
}
int main( void )
{
//句柄(可以理解为一个任务的唯一标识)
TaskHandle_t xTaskHandle1; //创建句柄
#ifdef DEBUG
debug();
#endif
prvSetupHardware();
printf("Hello World\r\n");
//动态创建任务
xTaskCreate(task1Function,"Task1",100,NULL,1,&xTaskHandle1); //创建任务1
xTaskCreate(task2Function,"Task2",100,NULL,1,NULL); //创建任务2
/*
* 前面5个参数都跟xTaskCreate一样
* puxStackBuffer:传入一个栈,所谓栈就是一个空闲的内存,所以我们可以传一个数组
*/
//静态创建任务
xTaskCreateStatic(task3Function,"Task3",100,NULL,1,xTask3Stack,&xTask3TCB);
/* Start the scheduler. */
vTaskStartScheduler();
/* Will only get here if there was not enough heap space to create the
idle task. */
return 0;
}
运行结果
总结
动态内存的使用
- 怎么表示任务?
- 以面向对象的思想:任务控制块
- 可以动态分配
- 多任务的核心:栈,可以动态分配
静态创建任务
- 事先分配好任务控制块
- 事先提供栈
进一步实验
优先级实验
高优先级的任务先执行,同优先级的任务交替执行
- 定义任务标记用来表示任务是否运行
- 将变量添加到逻辑分析仪中
- 首先运行到main函数中
- 变量名右键 ——> add ‘变量名’ to ——> logic Analyzer
- 逻辑分析仪中右键变量名改为Bit
同优先级实验
在下面逻辑分析仪中可以看出同优先级的任务他们的交叉执行
代码
//用来标记任务是否运行
static int task1flagrun = 0;
static int task2flagrun = 0;
static int task3flagrun = 0;
/*-----------------------------------------------------------*/
void task1Function(void * Parameters)
{
while(1)
{
task1flagrun = 1;
task2flagrun = 0;
task3flagrun = 0;
printf("1");
}
}
void task2Function(void * Parameters)
{
while(1)
{
task1flagrun = 0;
task2flagrun = 1;
task3flagrun = 0;
printf("2");
}
}
void task3Function(void * Parameters)
{
while(1)
{
task1flagrun = 0;
task2flagrun = 0;
task3flagrun = 1;
printf("3");
}
}
/*-----------------------------------------------------------*/
//创建一个栈空间
StackType_t xTask3Stack[100]; //这里100的话深度(usStackDepth)也得写100
//创建TCB
StaticTask_t xTask3TCB;
//创建一个空闲任务
StackType_t xIdleTaskStack[100];
StaticTask_t xIdleTaskTCB;
//想要调用xTaskCreateStatic的话得要实现vApplicationGetIdleTaskMemory函数
void vApplicationGetIdleTaskMemory( StaticTask_t ** ppxIdleTaskTCBBuffer,
StackType_t ** ppxIdleTaskStackBuffer,
uint32_t * pulIdleTaskStackSize )
{
*ppxIdleTaskTCBBuffer = &xIdleTaskTCB;
*ppxIdleTaskStackBuffer = xIdleTaskStack;
*pulIdleTaskStackSize = 100;
}
int main( void )
{
//句柄(可以理解为一个任务的唯一标识)
TaskHandle_t xTaskHandle1; //创建句柄
#ifdef DEBUG
debug();
#endif
prvSetupHardware();
printf("Hello World\r\n");
//动态创建任务
xTaskCreate(task1Function,"Task1",100,NULL,1,&xTaskHandle1); //创建任务1
xTaskCreate(task2Function,"Task2",100,NULL,1,NULL); //创建任务2
/*
* 前面5个参数都跟xTaskCreate一样
* puxStackBuffer:传入一个栈,所谓栈就是一个空闲的内存,所以我们可以传一个数组
*/
//静态创建任务
xTaskCreateStatic(task3Function,"Task3",100,NULL,1,xTask3Stack,&xTask3TCB);
/* Start the scheduler. */
vTaskStartScheduler();
/* Will only get here if there was not enough heap space to create the
idle task. */
return 0;
}
运行结果
不同优先级实验
将上面代码中task3Function改为优先级2,其他两个任务的优先级均为1
可以看出只有taskFunction在运行
高优先级的任务先执行,如果高优先级的任务没有主动放弃执行的话,其他低优先级的任务将不能执行
删除任务实验
我们创建一个任务,并且传入了一个xTaskHandle1,让我们可以引用这个任务
想要删除任务,即必须要通过xTaskHandlex
vTaskDelete
- 功能:删除xTaskCreate和xTaskCreateStatic创建的任务
- 参数:传入一个TaskHandle_t(句柄)
代码
//句柄(可以理解为一个任务的唯一标识)
TaskHandle_t xTaskHandle1; //创建句柄
TaskHandle_t xTaskHandle3; //创建句柄
//用来标记任务是否运行
static int task1flagrun = 0;
static int task2flagrun = 0;
static int task3flagrun = 0;
/*-----------------------------------------------------------*/
void task1Function(void * Parameters)
{
while(1)
{
task1flagrun = 1;
task2flagrun = 0;
task3flagrun = 0;
printf("1");
}
}
void task2Function(void * Parameters)
{
int i;
while(1)
{
task1flagrun = 0;
task2flagrun = 1;
task3flagrun = 0;
printf("2");
if(i++ == 100)
{
vTaskDelete(xTaskHandle1); //将任务1删除
}
if(i == 200)
{
vTaskDelete(xTaskHandle3); //将任务3删除
}
if(i == 300)
{
vTaskDelete(NULL); //将任务2删除(自杀)
}
}
}
void task3Function(void * Parameters)
{
while(1)
{
task1flagrun = 0;
task2flagrun = 0;
task3flagrun = 1;
printf("3");
}
}
/*-----------------------------------------------------------*/
//创建一个栈空间
StackType_t xTask3Stack[100]; //这里100的话深度(usStackDepth)也得写100
//创建TCB
StaticTask_t xTask3TCB;
//创建一个空闲任务
StackType_t xIdleTaskStack[100];
StaticTask_t xIdleTaskTCB;
//想要调用xTaskCreateStatic的话得要实现vApplicationGetIdleTaskMemory函数
void vApplicationGetIdleTaskMemory( StaticTask_t ** ppxIdleTaskTCBBuffer,
StackType_t ** ppxIdleTaskStackBuffer,
uint32_t * pulIdleTaskStackSize )
{
*ppxIdleTaskTCBBuffer = &xIdleTaskTCB;
*ppxIdleTaskStackBuffer = xIdleTaskStack;
*pulIdleTaskStackSize = 100;
}
int main( void )
{
#ifdef DEBUG
debug();
#endif
prvSetupHardware();
printf("Hello World\r\n");
xTaskCreate(task1Function,"Task1",100,NULL,1,&xTaskHandle1); //创建任务1
xTaskCreate(task2Function,"Task2",100,NULL,1,NULL); //创建任务2
//xTaskCreateStatic执行完之后会返回一个TaskHandle_t(句柄)类型的对象,我们可以通过这个来删除静态任务
xTaskHandle3 = xTaskCreateStatic(task3Function,"Task3",100,NULL,1,xTask3Stack,&xTask3TCB);
/* Start the scheduler. */
vTaskStartScheduler();
/* Will only get here if there was not enough heap space to create the
idle task. */
return 0;
}
运行结果
Hello World
3333333333331111111111122222222222233333333333111111111111222222222223333333333331111111111122222222222233333333333111111111111222222222223333333333331111111111122222222222233333333333111111111111222222222223333333333331111111111122222222222233333333333111111111111222222222223333333333331111111111122222222222233333333333222222222222333333333332222222222223333333333322222222222233333333333222222222222333333333332222222222223333333333322222222222233333333333222222222222333333333332222222222222222222222222222222222222222222222222222222222222222222222222222222222222222222222222222222222222222

使用同一个任务函数创建多个任务
代码
//句柄(可以理解为一个任务的唯一标识)
TaskHandle_t xTaskHandle1; //创建句柄
TaskHandle_t xTaskHandle3; //创建句柄
//用来标记任务是否运行
static int task1flagrun = 0;
static int task2flagrun = 0;
static int task3flagrun = 0;
/*-----------------------------------------------------------*/
void task1Function(void * Parameters)
{
while(1)
{
task1flagrun = 1;
task2flagrun = 0;
task3flagrun = 0;
printf("1");
}
}
void task2Function(void * Parameters)
{
int i;
while(1)
{
task1flagrun = 0;
task2flagrun = 1;
task3flagrun = 0;
printf("2");
if(i++ == 100)
{
vTaskDelete(xTaskHandle1); //将任务1删除
}
if(i == 200)
{
vTaskDelete(xTaskHandle3); //将任务3删除
}
if(i == 300)
{
vTaskDelete(NULL); //将任务2删除(自杀)
}
}
}
void task3Function(void * Parameters)
{
while(1)
{
task1flagrun = 0;
task2flagrun = 0;
task3flagrun = 1;
printf("3");
}
}
//创建通用函数
void taskGenericFunction(void * Para)
{
int val = (int)Para;
while(1)
{
printf("%d",val);
}
}
/*-----------------------------------------------------------*/
//创建一个栈空间
StackType_t xTask3Stack[100]; //这里100的话深度(usStackDepth)也得写100
//创建TCB
StaticTask_t xTask3TCB;
//创建一个空闲任务
StackType_t xIdleTaskStack[100];
StaticTask_t xIdleTaskTCB;
//想要调用xTaskCreateStatic的话得要实现vApplicationGetIdleTaskMemory函数
void vApplicationGetIdleTaskMemory( StaticTask_t ** ppxIdleTaskTCBBuffer,
StackType_t ** ppxIdleTaskStackBuffer,
uint32_t * pulIdleTaskStackSize )
{
*ppxIdleTaskTCBBuffer = &xIdleTaskTCB;
*ppxIdleTaskStackBuffer = xIdleTaskStack;
*pulIdleTaskStackSize = 100;
}
int main( void )
{
#ifdef DEBUG
debug();
#endif
prvSetupHardware();
printf("Hello World\r\n");
xTaskCreate(task1Function,"Task1",100,NULL,1,&xTaskHandle1); //创建任务1
xTaskCreate(task2Function,"Task2",100,NULL,1,NULL); //创建任务2
//xTaskCreateStatic执行完之后会返回一个TaskHandle_t(句柄)类型的对象,我们可以通过这个来删除静态任务
xTaskHandle3 = xTaskCreateStatic(task3Function,"Task3",100,NULL,1,xTask3Stack,&xTask3TCB);
//使用同一个任务函数创建多个任务
xTaskCreate(taskGenericFunction,"Task4",100,(void *)4,1,NULL);
xTaskCreate(taskGenericFunction,"Task5",100,(void *)5,1,NULL);
/* Start the scheduler. */
vTaskStartScheduler();
/* Will only get here if there was not enough heap space to create the
idle task. */
return 0;
}
运行结果
为什么同一个函数能够创建不同的任务呢?
- 因为它们的栈是不一样的
- 执行任务时传入不同的参数,首先它们的参数就不一样,其次,每个任务有自己的栈,这些局部变量都保存到不同的栈中,使得它们在运行的时候互不影响
栈大小实验
栈的分配操作:(具体细节在内存管理章节)
- 如下图,heap是一块空闲的内存
- 假设分配了一块空间长度为len
- 那么,在free的时候并没有传入长度,是怎么释放掉的呢?
- free传入了buff,知道了buff的首地址
- 在buff首地址前面有一个结构体,这个结构体至少存了buff的len信息
- 当使用free函数来释放buff的时候,就可以反过来知道buff的长度是多少
- 使用malloc(len)分配内存的时候,首先会分配一个头部,再去分配len字节的buff,最终返回头部后一个(Site)地址给buff
- 当我们释放内存时,从buff地址往前推,找出头部,获得头部的长度信息,从而就可以释放掉buff
- xTaskCreate(task1Function,“Task1”,100,NULL,1,&xTaskHandle1);
- xTaskCreate创建任务时会分配一个TCB结构体,还会分配栈
- 先分配TCB1的栈和头部
- 之后分配Task1的栈(100 * 4)和头部
- 同样道理,创建Tsak2时也是一样的
我们知道栈里面会保存各种寄存器和局部变量,我们知道栈是从高地址往下增长的(绿色线),当我们使用大量的局部变量之后就会破坏掉头和TCB1以及TCB1的头部,此时就会出现不可预计的后果
代码
void task1Function(void * Parameters)
{
//volatile:确保本条指令不会因编译器的优化而省略,且要求每次直接读值
//因为创建任务1的时候传入的栈值是100( 100*4 = 400),这里故意写大一点,让buf把占空间耗尽
volatile char buf[500];
int i;
while(1)
{
task1flagrun = 1;
task2flagrun = 0;
task3flagrun = 0;
printf("1");
for (i=0; i<500; i++)
buf[i] = 0; //把栈空间的值清零,此时会把TCB也破坏掉
}
}
void task2Function(void * Parameters)
{
while(1)
{
task1flagrun = 0;
task2flagrun = 1;
task3flagrun = 0;
printf("2");
}
}
void task3Function(void * Parameters)
{
while(1)
{
task1flagrun = 0;
task2flagrun = 0;
task3flagrun = 1;
printf("3");
}
}
//创建通用函数
void taskGenericFunction(void * Para)
{
int val = (int)Para;
while(1)
{
printf("%d",val);
}
}
/*-----------------------------------------------------------*/
//创建一个栈空间
StackType_t xTask3Stack[100]; //这里100的话深度(usStackDepth)也得写100
//创建TCB
StaticTask_t xTask3TCB;
//创建一个空闲任务
StackType_t xIdleTaskStack[100];
StaticTask_t xIdleTaskTCB;
//想要调用xTaskCreateStatic的话得要实现vApplicationGetIdleTaskMemory函数
void vApplicationGetIdleTaskMemory( StaticTask_t ** ppxIdleTaskTCBBuffer,
StackType_t ** ppxIdleTaskStackBuffer,
uint32_t * pulIdleTaskStackSize )
{
*ppxIdleTaskTCBBuffer = &xIdleTaskTCB;
*ppxIdleTaskStackBuffer = xIdleTaskStack;
*pulIdleTaskStackSize = 100;
}
int main( void )
{
#ifdef DEBUG
debug();
#endif
prvSetupHardware();
printf("Hello World\r\n");
xTaskCreate(task1Function,"Task1",100,NULL,1,&xTaskHandle1); //创建任务1
xTaskCreate(task2Function,"Task2",100,NULL,1,NULL); //创建任务2
//xTaskCreateStatic执行完之后会返回一个TaskHandle_t(句柄)类型的对象,我们可以通过这个来删除静态任务
xTaskHandle3 = xTaskCreateStatic(task3Function,"Task3",100,NULL,1,xTask3Stack,&xTask3TCB);
//使用同一个任务函数创建多个任务
xTaskCreate(taskGenericFunction,"Task4",100,(void *)4,1,NULL);
xTaskCreate(taskGenericFunction,"Task5",100,(void *)5,1,NULL);
/* Start the scheduler. */
vTaskStartScheduler();
/* Will only get here if there was not enough heap space to create the
idle task. */
return 0;
}
运行结果
HardFault_Handler硬件错误

任务管理
任务状态理论
- 任务切换的基础:tick中断
- 定时器,每隔1毫秒产生中断
- tick中断处理函数中会判断是否需要切换任务,若需要切换的话则会切换
- 这个1毫秒的时间是在FreeRTOSConfig.h文件中定义的,若想要更改时间的话可以更改configTICK_RATE_HZ宏
- 在FreeRtos中我们可以指定任务的tick次数,如Task1执行10次tick,Task2执行5次Tick
- 有哪些任务状态?状态切换图
- Running:正在运行状态
- Ready:准备状态(可随时运行)
- Blocked:阻塞状态(等待某些事情发生,才可以继续运行)
- suspended:暂停状态(主动休息 / 被命令去休息)
- 状态转换图:
- 怎么管理不同状态的任务:放在不同链表里
- 阻塞状态(Blocked)举例:vTaskDelay函数
- 暂停状态(Suspended)举例:vTaskSuspend / vTaskResume
任务状态实验
代码
- 创建三个任务,分别是:Task1、Task2、Task3
- 让Task1调用vTaskSuspend( Task3 )函数,让Task3进入到暂停状态(Suspend)
- 等待一段时间让Task1调用vTaskResume( Task3 )函数,让Task3从暂停状态进入准备状态(Ready)
- 注意:Task3必须要让其他正在运行的任务来调用vTaskResume函数来解除暂停状态
- 让Task2调用vTaskDelay函数(等待某个时间),主动进入阻塞状态(Blocked)
注意:
-
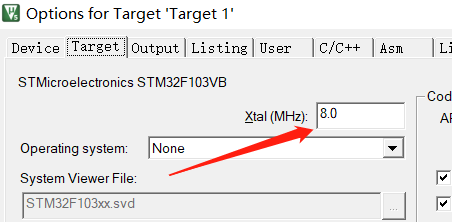
这里的时钟是72MHz,并且PLLCLK9倍频,所以要把外部晶振设置为8MHz
-
设置方法:
- 点击魔术棒 --> Target --> 在STMicroelectronics STM32F13VB处改为8.0
//句柄(可以理解为一个任务的唯一标识) TaskHandle_t xTaskHandle1; //创建句柄 TaskHandle_t xTaskHandle3; //创建句柄 //用来标记任务是否运行 static int task1flagrun = 0; static int task2flagrun = 0; static int task3flagrun = 0; /*-----------------------------------------------------------*/ void task1Function(void * Parameters) { //每次进入中断TickCount就会+1 TickType_t tStart = xTaskGetTickCount(); //记录开始时间 TickType_t t; int flag = 0; //标记是否进入暂停 printf("打印了1次\r\n"); while(1) { t = xTaskGetTickCount(); //记录当前时间 task1flagrun = 1; task2flagrun = 0; task3flagrun = 0; printf("1"); if( !flag && (t >= tStart + 10) ) { //如果时间大于10的话,就让Task3进入暂停状态 vTaskSuspend(xTaskHandle3); flag = 1; } if( t >= tStart + 20) { //让Task从暂停状态回到准备状态 vTaskResume( xTaskHandle3 ); } } } void task2Function(void * Parameters) { while(1) { task1flagrun = 0; task2flagrun = 1; task3flagrun = 0; printf("2"); //进入等待状态(Blocked) ,等待10个Tick的时间 vTaskDelay(10); } } void task3Function(void * Parameters) { while(1) { task1flagrun = 0; task2flagrun = 0; task3flagrun = 1; printf("3"); } } /*-----------------------------------------------------------*/ //创建一个栈空间 StackType_t xTask3Stack[100]; //这里100的话深度(usStackDepth)也得写100 //创建TCB StaticTask_t xTask3TCB; //创建一个空闲任务 StackType_t xIdleTaskStack[100]; StaticTask_t xIdleTaskTCB; //想要调用xTaskCreateStatic的话得要实现vApplicationGetIdleTaskMemory函数 void vApplicationGetIdleTaskMemory( StaticTask_t ** ppxIdleTaskTCBBuffer, StackType_t ** ppxIdleTaskStackBuffer, uint32_t * pulIdleTaskStackSize ) { *ppxIdleTaskTCBBuffer = &xIdleTaskTCB; *ppxIdleTaskStackBuffer = xIdleTaskStack; *pulIdleTaskStackSize = 100; } int main( void ) { #ifdef DEBUG debug(); #endif prvSetupHardware(); printf("Hello World\r\n"); xTaskCreate(task1Function,"Task1",100,NULL,1,&xTaskHandle1); //创建任务1 xTaskCreate(task2Function,"Task2",100,NULL,1,NULL); //创建任务2 //xTaskCreateStatic执行完之后会返回一个TaskHandle_t(句柄)类型的对象,我们可以通过这个来删除静态任务 xTaskHandle3 = xTaskCreateStatic(task3Function,"Task3",100,NULL,1,xTask3Stack,&xTask3TCB); /* Start the scheduler. */ vTaskStartScheduler(); /* Will only get here if there was not enough heap space to create the idle task. */ return 0; }
运行结果

-
当Task1累加到10次tick的时候,下一次运行将会把Task3变为暂停状态(Suspend)
-
对于Task2会在第一次运行的时候就进入阻塞状态(Blocked),当等待10个tick的时候重新返回准备状态(Ready)
VTaskDelay和vTaskDelayUntil
有两个Delay函数:
- vTaskDelay:至少等待指定个数的Tick Interrupt才能变为就绪状态。
- vTaskDelayUntil:等待到指定的绝对时刻,才能变为就绪状态。
如图,vTaskDelay是固定等待时间 N * Tick,如前面有一个不固定时间的程序,那么t1 到 t2 的时间就不是固定的
如图,从t1 到 t2 的时间称为△t ,当调用vTaskDelayUntil时传入t1 和 △t(终点),那么无论vTaskDelayUntil在t1的什么时候调用,t1 到 t2的时间都是不变的,变得只是阻塞时间(Blocked)
总结:
- vTaskDelay:固定Blocked等待时间,动态Tick中断时间
- vTaskDelayUntil:动态Blocked时间,固定Tick中断时间
代码
//句柄(可以理解为一个任务的唯一标识)
TaskHandle_t xTaskHandle1; //创建句柄
TaskHandle_t xTaskHandle3; //创建句柄
//用来标记任务是否运行
static int task1flagrun = 0;
static int task2flagrun = 0;
static int task3flagrun = 0;
/*-----------------------------------------------------------*/
//随机值,用来让Task1的执行时间不固定
static int radns[] = {3,53,45,110,12};
/*-----------------------------------------------------------*/
void task1Function(void * Parameters)
{
//每次进入中断TickCount就会+1
TickType_t tStart = xTaskGetTickCount(); //记录T1(此代码只会执行一次)
int i,j=0;
while(1)
{
task1flagrun = 1;
task2flagrun = 0;
task3flagrun = 0;
for(i=0; i<radns[j]; i++)
printf("1");
j++;
if(j == 5)
j = 0;
#if 0
vTaskDelay(8); //阻塞(等待)8个Tick
#else
/*
vTaskDelayUntil( pxPreviousWakeTime, xTimeIncrement )
1、直到*pxPr + △T时刻,该函数才会从Blocked状态退出
2、更新*pxPr:*pxPr(之前的T) + △T
*/
vTaskDelayUntil(&tStart,8);
#endif
}
}
void task2Function(void * Parameters)
{
while(1)
{
task1flagrun = 0;
task2flagrun = 1;
task3flagrun = 0;
printf("2");
}
}
void task3Function(void * Parameters)
{
while(1)
{
task1flagrun = 0;
task2flagrun = 0;
task3flagrun = 1;
printf("3");
}
}
/*-----------------------------------------------------------*/
//创建一个栈空间
StackType_t xTask3Stack[100]; //这里100的话深度(usStackDepth)也得写100
//创建TCB
StaticTask_t xTask3TCB;
//创建一个空闲任务
StackType_t xIdleTaskStack[100];
StaticTask_t xIdleTaskTCB;
//想要调用xTaskCreateStatic的话得要实现vApplicationGetIdleTaskMemory函数
void vApplicationGetIdleTaskMemory( StaticTask_t ** ppxIdleTaskTCBBuffer,
StackType_t ** ppxIdleTaskStackBuffer,
uint32_t * pulIdleTaskStackSize )
{
*ppxIdleTaskTCBBuffer = &xIdleTaskTCB;
*ppxIdleTaskStackBuffer = xIdleTaskStack;
*pulIdleTaskStackSize = 100;
}
int main( void )
{
#ifdef DEBUG
debug();
#endif
prvSetupHardware();
printf("Hello World\r\n");
//任务1的优先级最高
xTaskCreate(task1Function,"Task1",100,NULL,2,&xTaskHandle1); //创建任务1
xTaskCreate(task2Function,"Task2",100,NULL,1,NULL); //创建任务2
xTaskHandle3 = xTaskCreateStatic(task3Function,"Task3",100,NULL,1,xTask3Stack,&xTask3TCB);
/* Start the scheduler. */
vTaskStartScheduler();
/* Will only get here if there was not enough heap space to create the
idle task. */
return 0;
}
运行结果
当调用vTaskDelay函数时:
- 可以看到Task1的高电平时间(运行时间)是不一样的,但是休眠时间是一样的
当调用vTaskDelayUntil函数时:
- 此时t1在1.04ms时刻调用 --> t2:6.38 --> t3:11.71
- 从t1到t2,t2到t3的的间隔时间都差不多为5.34
空闲任务
- 删除任务后的清理工作,是在空闲任务(Idle,优先级为0)中完成的,比如释放任务的内存
- 空闲任务何时才能执行?
- 空闲任务只能处于这2个状态之一:Running、Ready
实验一
代码
- 在main函数里面创建Task1
- 在Task1里面创建Task2,并且删除Task2
void task2Function(void * Parameters);
void task1Function(void * Parameters)
{
TaskHandle_t xTaskHandle2; //Task2的Handle,用来删除Task2
BaseType_t xReturn;
while(1)
{
printf("1");
//当xTaskCreate创建成功后,会返回pdPASS
xReturn = xTaskCreate(task2Function,"Task2",1024,NULL,2,&xTaskHandle2);
if( xReturn != pdPASS ) //创建失败,唯一原因只有内存不够(堆不够)
printf("xTaskCreate err");
//因为Task2刚创建完,就会立马执行(优先级高),所以在这里调用删除函数,Task2也会执行至少一次的
vTaskDelete(xTaskHandle2); //干掉Task2
}
}
void task2Function(void * Parameters)
{
while(1)
{
printf("2");
//因为Task2的优先级比较高,所以想要在Task1中删除Task2就必须让Task2进入阻塞或者暂停状态
vTaskDelay(2); //休息2个Tick
}
}
/*-----------------------------------------------------------*/
int main( void )
{
//句柄(可以理解为一个任务的唯一标识)
TaskHandle_t xTaskHandle1; //创建句柄
#ifdef DEBUG
debug();
#endif
prvSetupHardware();
printf("Hello World\r\n");
xTaskCreate(task1Function,"Task1",100,NULL,1,&xTaskHandle1);
/* Start the scheduler. */
vTaskStartScheduler();
/* Will only get here if there was not enough heap space to create the
idle task. */
return 0;
}
运行结果
理论:
- Task1会不断的创建和删除Task2,但是Task1在不断的运行,导致Idle(空闲任务,优先级为0)没办法执行
- 也就是说没办法去清理Task2,意味着在Task1里面会不断地消耗内存,但是清理工作没办法执行,从而导致创建Task2失败
事实:
- 但是,运行结果并没有打印 “xTaskCreate err”,也就是说在空闲任务里面执行清理工作,那么这个结论需要修正一下
实验二 *
- 在main函数里面创建Task1
- 在Task1里面创建Task2
- 在Task2中将Task2删除(自杀)
代码
void task2Function(void * Parameters);
void task1Function(void * Parameters)
{
TaskHandle_t xTaskHandle2; //Task2的Handle,用来删除Task2
BaseType_t xReturn;
while(1)
{
printf("1");
//当xTaskCreate创建成功后,会返回pdPASS
xReturn = xTaskCreate(task2Function,"Task2",1024,NULL,2,&xTaskHandle2);
if( xReturn != pdPASS ) //创建失败,唯一原因只有内存不够
printf("xTaskCreate err");
//因为Task2刚创建完,就会立马执行(优先级高),所以在这里调用删除函数,Task2也会执行至少一次的
//vTaskDelete(xTaskHandle2); //干掉Task2 (不会出现内存不够)
}
}
void task2Function(void * Parameters)
{
while(1)
{
printf("2");
//因为Task2的优先级比较高,所以想要在Task1中删除Task2就必须让Task2进入阻塞或者暂停状态
//vTaskDelay(2); //休息2个Tick (不会出现内存不够)
/*
内存不够原因:
如果一个任务删除自己,它就不能完成一些清理工作,必须由空闲任务来完成清理工作
*/
vTaskDelete(NULL); //自杀(会出现内存不够)
}
}
/*-----------------------------------------------------------*/
int main( void )
{
//句柄(可以理解为一个任务的唯一标识)
TaskHandle_t xTaskHandle1; //创建句柄
#ifdef DEBUG
debug();
#endif
prvSetupHardware();
printf("Hello World\r\n");
xTaskCreate(task1Function,"Task1",100,NULL,1,&xTaskHandle1);
/* Start the scheduler. */
vTaskStartScheduler();
/* Will only get here if there was not enough heap space to create the
idle task. */
return 0;
}
运行结果
可以看到程序很快就出现了内存不够的情况
- 使用这种自杀的方式,应由空闲任务帮你释放内存
钩子函数
空闲任务钩子函数
- 执行一些低优先级的、后台的、需要连续执行的函数
- 测量系统的空闲时间:空闲任务能被执行就意味着所有的高优先级任务都停止了,所以测量空闲任务占据的时间,就可以算出处理器占用率
- 让系统进入省电模式:空闲任务能被执行就意味着没有重要的事情要做,当然可以进入省电模式了
- 绝对不能导致任务进入Blocked、Suspended状态
- 如果你会使用vTaskDelete()来删除任务,那么钩子函数要非常高效地执行。如果空闲任务移植卡在钩子函数里的话,它就无法释放内存
使用钩子函数的前提:
- 把这个宏定义为1:configUSE_IDLE_HOOK
- 实现 vApplicationIdleHook 函数
代码
static int task1Flagrun = 0;
static int task2Flagrun = 0;
static int taskidleFlagrun = 0;
void task2Function(void * Parameters);
void task1Function(void * Parameters)
{
TaskHandle_t xTaskHandle2; //Task2的Handle,用来删除Task2
BaseType_t xReturn;
while(1)
{
task1Flagrun = 1;
task2Flagrun = 0;
taskidleFlagrun = 0;
printf("1");
xReturn = xTaskCreate(task2Function,"Task2",1024,NULL,2,&xTaskHandle2);
if( xReturn != pdPASS ) //创建失败,唯一原因只有内存不够
printf("xTaskCreate err\r\n");
}
}
void task2Function(void * Parameters)
{
while(1)
{
task1Flagrun = 0;
task2Flagrun = 1;
taskidleFlagrun = 0;
printf("2");
vTaskDelete(NULL); //自杀(会出现内存不够)
}
}
void vApplicationIdleHook( void )
{
task1Flagrun = 0;
task2Flagrun = 0;
taskidleFlagrun = 1;
printf("0");
}
/*-----------------------------------------------------------*/
int main( void )
{
//句柄(可以理解为一个任务的唯一标识)
TaskHandle_t xTaskHandle1; //创建句柄
#ifdef DEBUG
debug();
#endif
prvSetupHardware();
printf("Hello World\r\n");
xTaskCreate(task1Function,"Task1",100,NULL,0,&xTaskHandle1);
/* Start the scheduler. */
vTaskStartScheduler(); //此处会创建空闲任务
/* Will only get here if there was not enough heap space to create the
idle task. */
return 0;
}
运行结果
- 此时空闲任务是有机会执行的,它一旦有机会执行就会去做清理工作,内存就不会被耗尽

任务调度算法
状态与事件
正在运行的任务,被称为"正在使用处理器",它处于运行状态。在单处理器系统中,任何时间里只能有一个任务处于运行状态。
非运行状态的任务,它处于这3种状态之一:
- 阻塞(Blocked)
- 暂停(Suspended)
- 就绪(Ready)
就绪态的任务,可以被调度器挑选出来切换为运行状态,调度器永远都是挑选最高优先级的就绪态任务并让它进入运行状态。
阻塞状态的任务,它在等待"事件",当事件发生时任务就会进入就绪状态。
事件分为两类:
- 时间相关的事件
- 所谓时间相关的事件,就是设置超时时间:在指定时间内阻塞,时间到了就进入就绪状态。
- 使用时间相关的事件,可以实现周期性的功能、可以实现超时功能。
- 同步事件
- 同步事件就是:某个任务在等待某些信息,别的任务或者中断服务程序会给它发送信息。
- 怎么"发送信息"?方法很多
- 任务通知(task notification)
- 队列(queue)
- 事件组(event group)
- 信号量(semaphoe)
- 互斥量(mutex)等
- 这些方法用来发送同步信息,比如表示某个外设得到了数据。
调度算法
从3个角度统一理解多种调度算法:
- 可否抢占?高优先级的任务能否优先执行(配置项: configUSE_PREEMPTION)
- 可以:被称作"可抢占调度"(Pre-emptive),高优先级的就绪任务马上执行,下面再细化。
- 不可以:不能抢就只能协商了,被称作"合作调度模式"(Co-operative Scheduling)
- 当前任务执行时,更高优先级的任务就绪了也不能马上运行,只能等待当前任务主动让 出CPU资源。
- 其他同优先级的任务也只能等待:更高优先级的任务都不能抢占,平级的更应该老实点
- 可抢占的前提下,同优先级的任务是否轮流执行(配置项:configUSE_TIME_SLICING)
- 轮流执行:被称为"时间片轮转"(Time Slicing),同优先级的任务轮流执行,你执行一个时间 片、我再执行一个时间片
- 不轮流执行:英文为"without Time Slicing",当前任务会一直执行,直到主动放弃、或者被 高优先级任务抢占
- 在"可抢占"+"时间片轮转"的前提下,进一步细化:空闲任务是否让步于用户任务(配置项: configIDLE_SHOULD_YIELD)
- 空闲任务低人一等,每执行一次循环,就看看是否主动让位给用户任务
- 空闲任务跟用户任务一样,大家轮流执行,没有谁更特殊
列表如下:
| 配置项 | A | B | C | D | E |
|---|---|---|---|---|---|
| configUSE_PREEMPTION | 1 | 1 | 1 | 1 | 0 |
| configUSE_TIME_SLICING | 1 | 1 | 0 | 0 | x |
| configIDLE_SHOULD_YIELD | 1 | 0 | 1 | 0 | x |
| 说明 | 常用 | 很少用 | 很少用 | 很少用 | 几乎不用 |
注:
- A:可抢占+时间片轮转+空闲任务让步
- B:可抢占+时间片轮转+空闲任务不让步
- C:可抢占+非时间片轮转+空闲任务让步
- D:可抢占+非时间片轮转+空闲任务不让步
- E:合作调度
是否可抢占

配置此配置项可决定是否可抢占
- 若为0,即不可抢占
- 若为1,即可抢占
代码
static volatile int flagIdleTaskrun = 0; // 空闲任务运行时flagIdleTaskrun=1
static volatile int flagTask1run = 0; // 任务1运行时flagTask1run=1
static volatile int flagTask2run = 0; // 任务2运行时flagTask2run=1
static volatile int flagTask3run = 0; // 任务3运行时flagTask3run=1
/*-----------------------------------------------------------*/
void vTask1( void *pvParameters )
{
/* 任务函数的主体一般都是无限循环 */
for( ;; )
{
flagIdleTaskrun = 0;
flagTask1run = 1;
flagTask2run = 0;
flagTask3run = 0;
/* 打印任务的信息 */
printf("T1\r\n");
}
}
void vTask2( void *pvParameters )
{
/* 任务函数的主体一般都是无限循环 */
for( ;; )
{
flagIdleTaskrun = 0;
flagTask1run = 0;
flagTask2run = 1;
flagTask3run = 0;
/* 打印任务的信息 */
printf("T2\r\n");
}
}
void vTask3( void *pvParameters )
{
const TickType_t xDelay5ms = pdMS_TO_TICKS( 5UL );
/* 任务函数的主体一般都是无限循环 */
for( ;; )
{
flagIdleTaskrun = 0;
flagTask1run = 0;
flagTask2run = 0;
flagTask3run = 1;
/* 打印任务的信息 */
printf("T3\r\n");
// 如果不休眠的话, 其他任务无法得到执行
vTaskDelay( xDelay5ms );
}
}
void vApplicationIdleHook(void)
{
flagIdleTaskrun = 1;
flagTask1run = 0;
flagTask2run = 0;
flagTask3run = 0;
/* 故意加入打印让flagIdleTaskrun变为1的时间维持长一点 */
//printf("Id\r\n");
}
int main( void )
{
prvSetupHardware();
xTaskCreate(vTask1, "Task 1", 1000, NULL, 0, NULL);
xTaskCreate(vTask2, "Task 2", 1000, NULL, 0, NULL);
//此处Task3的优先级最高,所以当Task3从阻塞中出来之后,就会立马执行任务(此时为可抢占)
xTaskCreate(vTask3, "Task 3", 1000, NULL, 2, NULL);
/* 启动调度器 */
vTaskStartScheduler();
/* 如果程序运行到了这里就表示出错了, 一般是内存不足 */
return 0;
}
运行结果
当configUSE_PREEMPTION为0时(不可抢占):
- 当任务3进入阻塞状态时,任务1就会一直执行,即使任务3从阻塞状态中退出,任务1仍然再运行
- 若不允许抢占,可以在任务做完某件事之后主动放弃CPU资源
当configUSE_PREEMPTION为1时(允许抢占):
- 此处Task3的优先级最高,所以当Task3从阻塞中出来之后,就会立马执行任
- 其他任务优先级均为0,则交替执行
是否轮流执行

配置此配置项可决定同优先级是否可轮流执行
- 若为0,即不可轮流执行
- 若为1,即可轮流执行
代码
static volatile int flagIdleTaskrun = 0; // 空闲任务运行时flagIdleTaskrun=1
static volatile int flagTask1run = 0; // 任务1运行时flagTask1run=1
static volatile int flagTask2run = 0; // 任务2运行时flagTask2run=1
static volatile int flagTask3run = 0; // 任务3运行时flagTask3run=1
/*-----------------------------------------------------------*/
void vTask1( void *pvParameters )
{
/* 任务函数的主体一般都是无限循环 */
for( ;; )
{
flagIdleTaskrun = 0;
flagTask1run = 1;
flagTask2run = 0;
flagTask3run = 0;
/* 打印任务的信息 */
printf("T1\r\n");
}
}
void vTask2( void *pvParameters )
{
/* 任务函数的主体一般都是无限循环 */
for( ;; )
{
flagIdleTaskrun = 0;
flagTask1run = 0;
flagTask2run = 1;
flagTask3run = 0;
/* 打印任务的信息 */
printf("T2\r\n");
}
}
void vTask3( void *pvParameters )
{
const TickType_t xDelay5ms = pdMS_TO_TICKS( 5UL );
/* 任务函数的主体一般都是无限循环 */
for( ;; )
{
flagIdleTaskrun = 0;
flagTask1run = 0;
flagTask2run = 0;
flagTask3run = 1;
/* 打印任务的信息 */
printf("T3\r\n");
// 如果不休眠的话, 其他任务无法得到执行
vTaskDelay( xDelay5ms );
}
}
void vApplicationIdleHook(void)
{
flagIdleTaskrun = 1;
flagTask1run = 0;
flagTask2run = 0;
flagTask3run = 0;
/* 故意加入打印让flagIdleTaskrun变为1的时间维持长一点 */
//printf("Id\r\n");
}
int main( void )
{
prvSetupHardware();
xTaskCreate(vTask1, "Task 1", 1000, NULL, 0, NULL);
xTaskCreate(vTask2, "Task 2", 1000, NULL, 0, NULL);
//此处Task3的优先级最高,所以当Task3从阻塞中出来之后,就会立马执行任务(此时为可抢占)
xTaskCreate(vTask3, "Task 3", 1000, NULL, 2, NULL);
/* 启动调度器 */
vTaskStartScheduler();
/* 如果程序运行到了这里就表示出错了, 一般是内存不足 */
return 0;
}
运行结果
此处配置可抢占,不可轮流执行
- 可以看出当任务3放弃CPU资源后,某个任务就一直在执行(除了空闲),直到任务3重新抢回CPU资源
空闲任务是否礼让其他任务

此配置项可配置空闲任务是否礼让其他任务
- 若为0,则不礼让
- 若为1,则礼让
ldieTask任务内部流程
IdleTask(){
while(1)
{
xxxx //做某些事情
钩子(); //调用钩子函数
if: YIELD == 1
触发一次调度
endif
}
}
代码
static volatile int flagIdleTaskrun = 0; // 空闲任务运行时flagIdleTaskrun=1
static volatile int flagTask1run = 0; // 任务1运行时flagTask1run=1
static volatile int flagTask2run = 0; // 任务2运行时flagTask2run=1
static volatile int flagTask3run = 0; // 任务3运行时flagTask3run=1
/*-----------------------------------------------------------*/
void vTask1( void *pvParameters )
{
/* 任务函数的主体一般都是无限循环 */
for( ;; )
{
flagIdleTaskrun = 0;
flagTask1run = 1;
flagTask2run = 0;
flagTask3run = 0;
/* 打印任务的信息 */
printf("T1\r\n");
}
}
void vTask2( void *pvParameters )
{
/* 任务函数的主体一般都是无限循环 */
for( ;; )
{
flagIdleTaskrun = 0;
flagTask1run = 0;
flagTask2run = 1;
flagTask3run = 0;
/* 打印任务的信息 */
printf("T2\r\n");
}
}
void vTask3( void *pvParameters )
{
const TickType_t xDelay5ms = pdMS_TO_TICKS( 5UL );
/* 任务函数的主体一般都是无限循环 */
for( ;; )
{
flagIdleTaskrun = 0;
flagTask1run = 0;
flagTask2run = 0;
flagTask3run = 1;
/* 打印任务的信息 */
printf("T3\r\n");
// 如果不休眠的话, 其他任务无法得到执行
vTaskDelay( xDelay5ms );
}
}
void vApplicationIdleHook(void)
{
flagIdleTaskrun = 1;
flagTask1run = 0;
flagTask2run = 0;
flagTask3run = 0;
/* 故意加入打印让flagIdleTaskrun变为1的时间维持长一点 */
//printf("Id\r\n");
}
int main( void )
{
prvSetupHardware();
xTaskCreate(vTask1, "Task 1", 1000, NULL, 0, NULL);
xTaskCreate(vTask2, "Task 2", 1000, NULL, 0, NULL);
//此处Task3的优先级最高,所以当Task3从阻塞中出来之后,就会立马执行任务(此时为可抢占)
xTaskCreate(vTask3, "Task 3", 1000, NULL, 2, NULL);
/* 启动调度器 */
vTaskStartScheduler();
/* 如果程序运行到了这里就表示出错了, 一般是内存不足 */
return 0;
}
运行结果
此处为configIDLE_SHOULD_YIELD = 0时,即空闲任务不礼让其他任务
- 可以看出空闲任务和其他任务的运行时间都差不多
此处为configIDLE_SHOULD_YIELD = 1时,即空闲任务不礼让其他任务
- 可以看出明显比上面的运行时间要短
xxx //做某些事情
钩子(); //调用钩子函数
if: YIELD == 1
触发一次调度
endif
}
}
#### 代码
```c
static volatile int flagIdleTaskrun = 0; // 空闲任务运行时flagIdleTaskrun=1
static volatile int flagTask1run = 0; // 任务1运行时flagTask1run=1
static volatile int flagTask2run = 0; // 任务2运行时flagTask2run=1
static volatile int flagTask3run = 0; // 任务3运行时flagTask3run=1
/*-----------------------------------------------------------*/
void vTask1( void *pvParameters )
{
/* 任务函数的主体一般都是无限循环 */
for( ;; )
{
flagIdleTaskrun = 0;
flagTask1run = 1;
flagTask2run = 0;
flagTask3run = 0;
/* 打印任务的信息 */
printf("T1\r\n");
}
}
void vTask2( void *pvParameters )
{
/* 任务函数的主体一般都是无限循环 */
for( ;; )
{
flagIdleTaskrun = 0;
flagTask1run = 0;
flagTask2run = 1;
flagTask3run = 0;
/* 打印任务的信息 */
printf("T2\r\n");
}
}
void vTask3( void *pvParameters )
{
const TickType_t xDelay5ms = pdMS_TO_TICKS( 5UL );
/* 任务函数的主体一般都是无限循环 */
for( ;; )
{
flagIdleTaskrun = 0;
flagTask1run = 0;
flagTask2run = 0;
flagTask3run = 1;
/* 打印任务的信息 */
printf("T3\r\n");
// 如果不休眠的话, 其他任务无法得到执行
vTaskDelay( xDelay5ms );
}
}
void vApplicationIdleHook(void)
{
flagIdleTaskrun = 1;
flagTask1run = 0;
flagTask2run = 0;
flagTask3run = 0;
/* 故意加入打印让flagIdleTaskrun变为1的时间维持长一点 */
//printf("Id\r\n");
}
int main( void )
{
prvSetupHardware();
xTaskCreate(vTask1, "Task 1", 1000, NULL, 0, NULL);
xTaskCreate(vTask2, "Task 2", 1000, NULL, 0, NULL);
//此处Task3的优先级最高,所以当Task3从阻塞中出来之后,就会立马执行任务(此时为可抢占)
xTaskCreate(vTask3, "Task 3", 1000, NULL, 2, NULL);
/* 启动调度器 */
vTaskStartScheduler();
/* 如果程序运行到了这里就表示出错了, 一般是内存不足 */
return 0;
}
运行结果
此处为configIDLE_SHOULD_YIELD = 0时,即空闲任务不礼让其他任务
- 可以看出空闲任务和其他任务的运行时间都差不多
此处为configIDLE_SHOULD_YIELD = 1时,即空闲任务不礼让其他任务
- 可以看出明显比上面的运行时间要短