Shuffle Attetion

Abstract
广泛应用的注意力机制主要有空间注意力机制和通道注意力机制,其目的分别是捕捉像素级的成对关系和通道依赖关系。虽然将两种机制融合在一起可以获得比单独更好的性能,但计算开销不可避免。因而,本文提出Shuffle Attetion,即SA,以解决这个问题。SA采用Shuffle Units有效地结合两种注意力机制。具体来说,SA首先将通道维度分组为多个子特征,然后并行处理。对于每个子特征,SA利用Shuffle Units描述空间和通道维度上的特征依赖关系,然后对所有子特征进行聚合,采用channel shuffle算子实现不同子特征间的信息通信。
1. Introduction
1.1 背景
注意力机制分为两种,通道注意和空间注意,都是通过不同的聚集策略、转换和强化函数,从所有位置聚集相同的特征来增强原始特征。
GCNet和CBAM将通道注意和空间注意整合到一个模块中,在取得显著结果的同时,也存在存在收敛困难或计算负担过重的问题。
ECA-Net通过使用一维卷积简化了SE模块中信道权重的计算过程;SGE将通道的维度划分为多个子特征表示不同的语义,使用注意掩码在所有位置缩放特征向量,对每个特征组应用空间机制。然而这些网络没有充分利用空间注意和通道注意之间的相关性,致使其效率较低。
1.2 启发
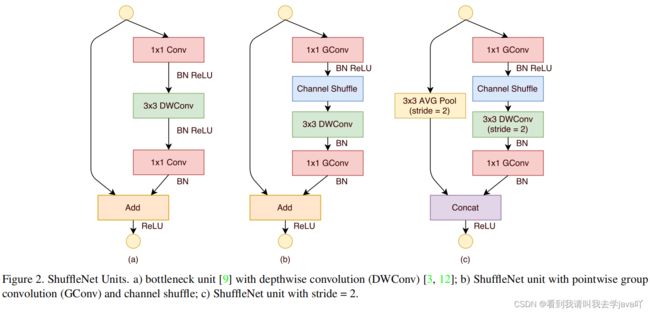
ShuffleNet v2构建多分支结构,并行处理分支。具体来说,在这个unit开始时, c c c个特征通道的输入被分成两个分支,分别是 c − c ′ c-c' c−c′和 c ′ c' c′通道。然后,采用几个卷积层捕获输入的更高级表示。在卷积之后,将两个分支连接起来,使通道的数量与输入的数量相同。最后采用channel shuffle算子实现两个分支之间的信息通信。
SGE引入了分组策略,将输入特征映射沿通道维度划分为组,然后所有子特征可以并行增强,以提高计算速度。
1.3 提出
本文提出Shuffle Attention 模块,即SA。该模块按通道维度分组为子特征。对于每个子特征,SA采用Shuffle Unit同时构建通道注意和空间注意。对于每个注意模块,本文设计了一个覆盖所有位置的注意掩模,以抑制可能的噪声并突出正确的语义特征区域。
2. RELATED WORK
2.1 多分支架构
多分支架构背后的原理是“分裂-转换-合并”,即split-transform-merge,这降低了训练数百层网络的难度。
InceptionNet系列是成功的多分支架构,其中每个分支都精心配置了自定义的内核过滤器,以便聚合更多信息和多种功能;ResNets也可以看作是两个分支网络,其中一个分支是身份映射;SKNets和ShuffleNet系列都遵循了InceptionNets的思想,为多个分支提供了各种过滤器,但SKNets利用自适应选择机制来实现神经元的自适应感受野大小,ShuffleNets进一步将channel split和channel shuffle操作合并为单元素操作,以在速度和准确性之间进行权衡。
2.2 特征分组
特征分组学习可追溯至AlexNet,其动机是将模型分配至更多的GPU上。
MobileNets和ShuffleNets将每个通道视为一个组;CapsuleNets将每个分组神经元建模为一个capsule,其中活动capsule中的神经元代表图像中特定实体的各种属性;SGE优化了CapsuleNets,按通道维度划分多个子特征来学习不同的语义。
2.3 注意力机制
注意力机制突出信心量大的特征,而抑制不太有用的特征;自注意力机制会计算一个位置的上下文,作为图像中所有位置的加权和。
SE使用2个FC层对通道关系进行建模;ECA-Net采用一维卷积生成通道权值,降低了SE的复杂度;NL(non-local)通过计算特征图中空间点的关系矩阵生成注意力图;CBAM、GCNet和SGE将空间注意和通道注意顺序结合;DANet通过将来自不同分支的两个注意力模块相加,自适应地将局部特征与其全局依赖结合起来。
3. SHUFFLE ATTENTION

3.1 Feature Grouping
给定特征图 X ∈ R C × H × W X\in \mathbb{R}^{C\times H\times W} X∈RC×H×W,沿通道维度将 X X X划分为 G G G组,即 X = [ X 1 , … , X G ] , X k ∈ R C G × H × W X=[X_1,…,X_G],X_k\in \mathbb{R}^{\frac{C}{G}\times H\times W} X=[X1,…,XG],Xk∈RGC×H×W。之后, X k X_k Xk沿通道维度分为双分支,即 X k 1 , X k 2 ∈ R C 2 G × H × W X_{k1},X_{k2}\in \mathbb{R}^{\frac{C}{2G}\times H\times W} Xk1,Xk2∈R2GC×H×W。其中一个分支利用通道间的关系生成通道注意图,一个分支利用特征的空间关系生成空间注意图(详见 3.2 3.2 3.2和 3.3 3.3 3.3)。
3.2 Channel Attention
在此处本欲直接利用SE模块和ECA网络,但其参数过多,不适用于轻量的注意力模块。
本文对其进行改进,首先使用全局平均池化GAP嵌入全局信息,生成通道统计数据,即 s ∈ R C 2 G × 1 × 1 s\in \mathbb{R}^{\frac{C}{2G}\times 1\times 1} s∈R2GC×1×1,其公式定义为:
s = F g p ( X k 1 ) = 1 H × W ∑ i = 1 H ∑ j = 1 W X k 1 ( i , j ) s=\mathcal{F}_{gp}(X_{k1})=\frac{1}{H\times W}\sum_{i=1}^H \sum_{j=1}^W X_{k1}(i,j) s=Fgp(Xk1)=H×W1i=1∑Hj=1∑WXk1(i,j)
然后,通过一个门控机制与 s i g m o i d sigmoid sigmoid激活函数,生成紧凑特征,其公式定义为:
X k 1 ′ = σ ( F c ( s ) ) ⋅ X k 1 = σ ( W 1 s + b 1 ) ⋅ X k 1 X_{k1}'=\sigma(\mathcal{F}_c(s))·X_{k1}=\sigma(W_1s+b_1)·X_{k1} Xk1′=σ(Fc(s))⋅Xk1=σ(W1s+b1)⋅Xk1
其中, W 1 , b 1 ∈ R C 2 G × 1 × 1 W_1,b_1\in \mathbb{R}^{\frac{C}{2G}\times 1\times 1} W1,b1∈R2GC×1×1,用于缩放和移动参数。
3.3 Spatial Attention
空间注意与通道注意互补。
首先,对 X k 2 X_{k2} Xk2使用组归一化GN获得空间统计,然后采用 F c ( ⋅ ) \mathcal{F}_c(·) Fc(⋅)增强 X k 2 X_{k2} Xk2,空间注意的最终输出如下:
X k 2 ′ = σ ( W 2 ⋅ G N ( X k 2 ) + b 2 ) ⋅ X k 2 X_{k2}'=\sigma(W_2·GN(X_{k2})+b_2)·X_{k2} Xk2′=σ(W2⋅GN(Xk2)+b2)⋅Xk2
其中, W 2 , b 2 ∈ R C 2 G × 1 × 1 W_2,b_2\in \mathbb{R}^{\frac{C}{2G}\times 1\times 1} W2,b2∈R2GC×1×1。
然后,将两个分支连接,是通道数等于输入数,即 X k ′ = [ X k 1 ′ , X k 2 ′ ] ∈ R C G × H × W X_k'=[X_{k1}',X_{k2}']\in \mathbb{R}^{\frac{C}{G}\times H \times W} Xk′=[Xk1′,Xk2′]∈RGC×H×W
3.4 Aggregation
与shuffle v2类似,采用channel shuffle操作,使组间信息沿通道维度流动。SA模块的最终输出与 X X X同尺寸,这使得SA模块易于与其他结构集成。
注意, W 1 , W 2 , b 1 , b 2 W_1,W_2,b_1,b_2 W1,W2,b1,b2和GN的超参数只在SA模块中。在这个SA模块中,每个分支的通道数是 C 2 G \frac{C}{2G} 2GC,因此,总参数量是 3 C G \frac{3C}{G} G3C, G G G通常取32或64,因而SA模块非常轻量。
3.5 SA-Net for Deep CNNs
为了将SA引入深度卷积中,可使用与SENet相同的配置,只是将SE替换为SA,生成的网络命名为SA-Net。
class sa_layer(nn.Module):
"""Constructs a Channel Spatial Group module.
Args:
k_size: Adaptive selection of kernel size
"""
def __init__(self, channel, groups=64):
super(sa_layer, self).__init__()
self.groups = groups
self.avg_pool = nn.AdaptiveAvgPool2d(1)
self.cweight = Parameter(torch.zeros(1, channel // (2 * groups), 1, 1))
self.cbias = Parameter(torch.ones(1, channel // (2 * groups), 1, 1))
self.sweight = Parameter(torch.zeros(1, channel // (2 * groups), 1, 1))
self.sbias = Parameter(torch.ones(1, channel // (2 * groups), 1, 1))
self.sigmoid = nn.Sigmoid()
self.gn = nn.GroupNorm(channel // (2 * groups), channel // (2 * groups))
@staticmethod
def channel_shuffle(x, groups):
b, c, h, w = x.shape
x = x.reshape(b, groups, -1, h, w)
x = x.permute(0, 2, 1, 3, 4)
# flatten
x = x.reshape(b, -1, h, w)
return x
def forward(self, x):
b, c, h, w = x.shape
x = x.reshape(b * self.groups, -1, h, w)
x_0, x_1 = x.chunk(2, dim=1)
# channel attention
xn = self.avg_pool(x_0)
xn = self.cweight * xn + self.cbias
xn = x_0 * self.sigmoid(xn)
# spatial attention
xs = self.gn(x_1)
xs = self.sweight * xs + self.sbias
xs = x_1 * self.sigmoid(xs)
# concatenate along channel axis
out = torch.cat([xn, xs], dim=1)
out = out.reshape(b, -1, h, w)
out = self.channel_shuffle(out, 2)
return out
浅析ShuffleNet
参考阿b视频
参考博客
神经网络的设计需要考虑准确度,还要注意衡量计算复杂度。目前计算复杂度的间接指标是浮点运算数,即FLOPs。然而衡量计算复杂度的直接指标,如速度,也取决于其他因素,如内存访问成本MAC和平台特性(如GPU和CPU)。因此,ShuffleNet的作者提出在目标平台上评估直接指标,而不是只考虑FLOPs。
- 整理:为什么不能用
FLOPs衡量速度?
- 其中一个因素是内存访问成本
MAC。MAC在某些操作中占据了运行时间的很大一部分,在具有强大计算能力的设备(如GPU)中,MAC更为突出。 - 并行度。在相同的
FLOPs下,并行计算的速度要比串行计算的速度快的多。 - 具有相同
FLOPs的操作在不同平台上会有不同的运行时间。
ShuffleNet的作者经过分析,针对速度,提出高效网络架构设计的4个实用指南:
- 当卷积层的输入特征与输出特征的
channel相等时,MAC最小。 - 当组卷积的分组增加时,
MAC也会增大。 - 网络设计的碎片化程度越高(包括串行与并行模块),速度越慢。
- 逐元素操作的计算成本不可忽视。
基于上述准则,建立高效的网络架构时应遵循以下准则:
- 通道数保持一致
- 意识到组卷积的使用成本
- 减少碎片化的程度(即串行和并行模块)
- 减少逐元素运算
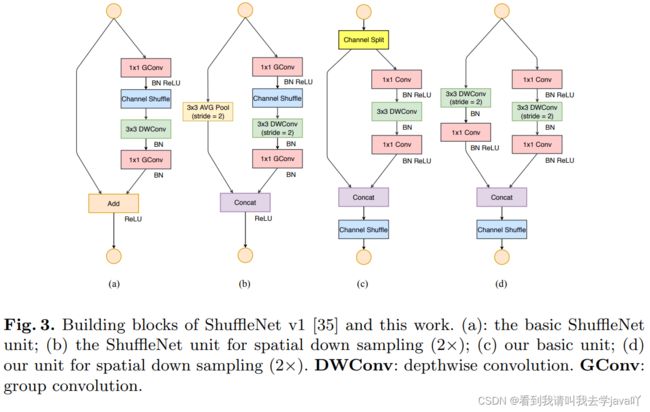
下图为ShuffleNet v1架构图:
起初,只设计一个残差块,后在残差块的基础上,将卷积替换为计算复杂度更低的DWConv,即图(a);将逐点卷积替换为组卷积,在第一个组卷积后加入channel shuffle,即图(b);卷积神经网络需要降采样的操作,一种方式采用最大池化层,另一种方式使用 s t r i d e = 2 stride=2 stride=2的卷积实现,即图©,此时融合没有采取相加,而是通道拼接,可降低计算复杂度扩大通道维度。
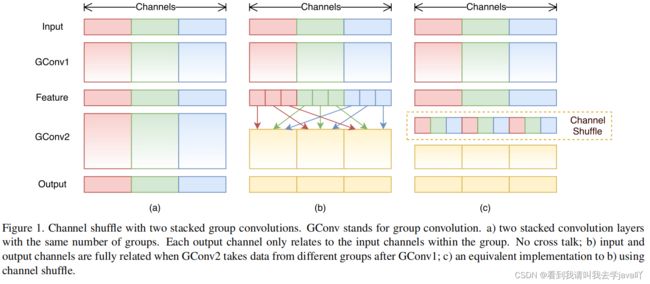
其中,channel shuffle操作如下:
下图为ShuffleNet两代演化图: