深度学习 二:COVID 19 Cases Prediction (Regression)
Deep Learning
- 1. 回归算法思路
- 2. 代码
-
- 2.1 基础操作
- 2.2 定义相关函数
-
- 2.3.1 定义图像绘制函数
- 2.3.2 数据集加载及预处理
- 2.3.3 构造数据加载器
- 2.3.4 构建前馈神经网络(Feedforward Neural Network)模型
- 2.3.5 神经网络的训练过程
- 2.3.6 模型评估
- 2.3.7 模型测试
- 2.3.8 模型初始化
- 2.3 模型运行
1. 回归算法思路
基于3层神经网络的回归优化
2. 代码
2.1 基础操作
切换文件路径,并创建新的文件夹:
%cd /content/drive/MyDrive
#change directory to google drive
#!mkdir ML2023
#make a directory named ML2023
%cd ./ML2023
#change directory to ML2023
/content/drive/MyDrive
/content/drive/MyDrive/ML2023
查看当前路径下的文件:
!ls
covid.test.csv covid.train.csv models
显示当前文件路径:
!pwd #output the current directory
/content/drive/MyDrive/ML2023
文件下载:
# Download Data
tr_path = 'covid.train.csv' # path to training data
tt_path = 'covid.test.csv' # path to testing data
!gdown --id '19CCyCgJrUxtvgZF53vnctJiOJ23T5mqF' --output covid.train.csv
!gdown --id '1CE240jLm2npU-tdz81-oVKEF3T2yfT1O' --output covid.test.csv
Downloading…
From: https://drive.google.com/uc?id=19CCyCgJrUxtvgZF53vnctJiOJ23T5mqF
To: /content/covid.train.csv
100% 2.00M/2.00M [00:00<00:00, 31.7MB/s]
Downloading…
From: https://drive.google.com/uc?id=1CE240jLm2npU-tdz81-oVKEF3T2yfT1O
To: /content/covid.test.csv
100% 651k/651k [00:00<00:00, 10.2MB/s]
导入所需要的相关包:
# Import Some Packages
# PyTorch
import torch
import torch.nn as nn
from torch.utils.data import Dataset, DataLoader
# For data preprocess
import numpy as np
import csv
import os
# For plotting
import matplotlib.pyplot as plt
from matplotlib.pyplot import figure
# For feature selection
from sklearn.feature_selection import SelectKBest
from sklearn.feature_selection import mutual_info_regression
2.2 定义相关函数
2.3.1 定义图像绘制函数
def get_device():
''' Get device (if GPU is available, use GPU) '''
return 'cuda' if torch.cuda.is_available() else 'cpu'
def plot_learning_curve(loss_record, title=''):
''' Plot learning curve of your DNN (train & dev loss) dev:development'''
total_steps = len(loss_record['train']) #
x_1 = range(total_steps)
figure(figsize=(6, 4))
plt.plot(x_1, loss_record['train'], c='tab:red', label='train')
if len(loss_record['dev'])!=0:
x_2 = x_1[::len(loss_record['train']) // len(loss_record['dev'])] # 计算步长,保持训练集和开发集步长一致
plt.plot(x_2, loss_record['dev'], c='tab:cyan', label='dev')
plt.ylim(0.0, 20.0) # 设置纵坐标的范围,将其限制在0.0到20.0之间
plt.xlabel('Training steps')
plt.ylabel('MSE loss') # RMSE?
plt.title('Learning curve of {}'.format(title))
plt.legend()
plt.show()
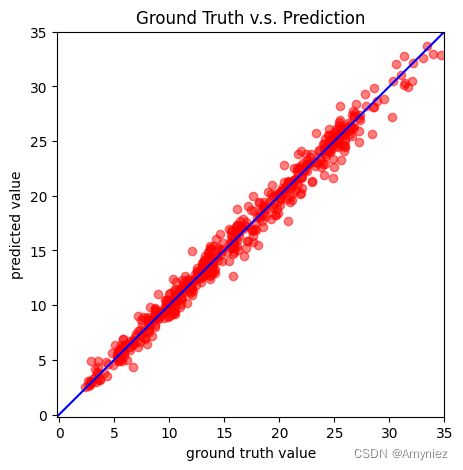
# 绘制预测结果的散点图
def plot_pred(dv_set, model, device, lim=35., preds=None, targets=None):
# dv_set:开发集(或验证集)的数据集,包含输入特征和实际目标值。
# model:训练好的深度神经网络模型,用于进行预测。
# device:指定模型在哪个设备上运行,通常是CPU或GPU。
# lim:横纵坐标的限制范围,默认为35。
# preds:模型的预测值(可选参数),如果未提供,则会重新计算。
# targets:实际目标值(可选参数),如果未提供,则会重新获取
''' Plot prediction of your DNN '''
if preds is None or targets is None:
model.eval()
preds, targets = [], []
for x, y in dv_set: # x是输入特征,y是实际目标值
x, y = x.to(device), y.to(device)
with torch.no_grad():
pred = model(x)
preds.append(pred.detach().cpu())
targets.append(y.detach().cpu())
preds = torch.cat(preds, dim=0).numpy()
targets = torch.cat(targets, dim=0).numpy()
figure(figsize=(5, 5))
plt.scatter(targets, preds, c='r', alpha=0.5)
plt.plot([-0.2, lim], [-0.2, lim], c='b')
plt.xlim(-0.2, lim)
plt.ylim(-0.2, lim)
plt.xlabel('ground truth value')
plt.ylabel('predicted value')
plt.title('Ground Truth v.s. Prediction')
plt.show()
2.3.2 数据集加载及预处理
class COVID19Dataset(Dataset):
''' Dataset for loading and preprocessing the COVID19 dataset '''
# target_only:一个布尔值,表示是否仅使用目标特征(在这里是最后一列)
# 如果target_only为True,则只选择目标特征,否则选择一组特定的特征
def __init__(self,
path,
mode='train',
target_only=False):
self.mode = mode
# Read data into numpy arrays
with open(path, 'r') as fp:
data = list(csv.reader(fp))
data = np.array(data[1:])[:, 1:].astype(float) # 切片操作去掉第1列和行
if not target_only:
feats = list(range(93)) # 一共94个特征,但是需要除去最后一个特征,最后一个特征是用来预测的
else:
# TODO: Using 40 states & 2 tested_positive features (indices = 57 & 75)!!!
# 使用硬编码
feats = [40, 41, 42, 43, 57, 58, 59, 60, 61, 75, 76, 77, 78, 79] # sklean mutual info
if mode == 'test':
# Testing data
# data: 893 x 93 (40 states + day 1 (18) + day 2 (18) + day 3 (17))
data = data[:, feats]
self.data = torch.FloatTensor(data)
else:
# Training data (train/dev sets)
# data: 2700 x 94 (40 states + day 1 (18) + day 2 (18) + day 3 (18))
target = data[:, -1]
data = data[:, feats]
# 整个train+dev一起mean/std
self.mean = torch.FloatTensor(data).mean(dim=0, keepdim=True)
# 计算张量中每列的均值
# keepdim=True保持结果的维度与输入张量相同,结果将仍然是一个包含均值的张量,但它将具有与每列相同的维度
self.std = torch.FloatTensor(data).std(dim=0, keepdim=True)
# Splitting training data into train & dev sets
if mode == 'train':
indices = [i for i in range(len(data)) if i % 5 != 0]
elif mode == 'dev':
indices = [i for i in range(len(data)) if i % 5 == 0]
# Convert data into PyTorch tensors
self.data = torch.FloatTensor(data[indices])
self.target = torch.FloatTensor(target[indices])
self.dim = self.data.shape[1] # 获取数据集self.data的列数,也就是特征的数量
print('Finished reading the {} set of COVID19 Dataset ({} samples found, each dim = {})'
.format(mode, len(self.data), self.dim))
# All subclasses should overwrite __getitem__,
# supporting fetching a data sample for a given key.
def __getitem__(self, index):
# Returns one sample at a time
if self.mode in ['train', 'dev']:
# For training
return self.data[index], self.target[index]
else:
# For testing (no target)
return self.data[index]
def __len__(self):
# Returns the size of the dataset
return len(self.data)
def normalization(self, mean=None, std=None):
# Normalize features (you may remove this part to see what will happen)
# The mean and standard variance of training data will be reused to normalize testing data.
if self.mode == 'train' or self.mode =='dev':
mean = self.mean
std = self.std
self.data = (self.data-mean) / std
else:
self.data = (self.data-mean) / std
return mean, std
Z-Score 标准化(标准差标准化): 将数据缩放到均值为0,标准差为1的标准正态分布
-
计算特征的均值(mean):
μ = 1 N ∑ i = 1 N x i \mu = \frac{1}{N} \sum_{i=1}^{N} x_i μ=N1∑i=1Nxi -
计算特征的标准差(standard deviation):
σ = 1 N ∑ i = 1 N ( x i − μ ) 2 \sigma = \sqrt{\frac{1}{N} \sum_{i=1}^{N} (x_i - \mu)^2} σ=N1∑i=1N(xi−μ)2 -
对每个数据点 x i x_i xi,应用以下标准化公式:
z i = x i − μ σ z_i = \frac{x_i - \mu}{\sigma} zi=σxi−μ -
数据的均值为0,即标准化后的数据集的均值接近于0。
-
数据的标准差为1,即标准化后的数据集的标准差接近于1。
-
数据的分布形状不会改变,只是尺度和位置发生了变化。
Z-Score 标准化适用于许多统计和机器学习算法,特别是对于需要计算距离或涉及梯度下降等数值计算的算法。通过标准化,可以确保不同特征的尺度不会对模型的训练产生不适当的影响,帮助模型更快地收敛并提高性能。
Min-Max 标准化(最小-最大值缩放):
-
计算特征的最小值: x min = min ( x 1 , x 2 , … , x N ) x_{\text{min}} = \min(x_1, x_2, \ldots, x_N) xmin=min(x1,x2,…,xN)
-
计算特征的最大值: x max = max ( x 1 , x 2 , … , x N ) x_{\text{max}} = \max(x_1, x_2, \ldots, x_N) xmax=max(x1,x2,…,xN)
-
对每个数据点 x i x_i xi,应用以下标准化公式:
x i ′ = x i − x min x max − x min x_i' = \frac{x_i - x_{\text{min}}}{x_{\text{max}}- x_{\text{min}}} xi′=xmax−xminxi−xmin -
σ \sigma σ 表示标准差。
-
N N N 表示数据点的总数。
-
x i x_i xi 表示数据集中的第 i 个数据点。
-
μ \mu μ 表示数据集的均值(平均值),计算方式为: μ = 1 N ∑ i = 1 N x i \mu = \frac{1}{N} \sum_{i=1}^{N} x_i μ=N1∑i=1Nxi
2.3.3 构造数据加载器
构造数据加载器,用于训练、验证或测试机器学习模型。
# 定义函数可接受多个参数,包括数据文件路径path、数据集模式mode、批量大小batch_size、并行工作数n_jobs、
# 是否仅使用目标数据target_only以及均值和标准差的参数。
def prep_dataloader(path, mode, batch_size, n_jobs=0, target_only=False, mean=None, std=None):
''' Generates a dataset, then is put into a dataloader. '''
# Construct dataset
dataset = COVID19Dataset(path, mode=mode, target_only=target_only)
mean, std = dataset.normalization(mean, std)
# 创建数据加载器对象:将数据集划分成小批量,并提供批量数据以供模型训练
dataloader = DataLoader(
dataset, batch_size,
shuffle=(mode == 'train'), # shuffle为一个布尔值,指示是否在每个周期(epoch)之前随机打乱数据。
# 通常在训练模型时设置为True,确保每个周期中的样本顺序不同。
drop_last=False,
num_workers=n_jobs, pin_memory=True)
return dataloader, mean, std
2.3.4 构建前馈神经网络(Feedforward Neural Network)模型
class NeuralNet(nn.Module):
''' A simple fully-connected deep neural network '''
def __init__(self, input_dim):
super(NeuralNet, self).__init__()
# Define neural network here
# TODO: How to modify this model to achieve better performance?
# 定义了神经网络的结构,包括输入层、隐藏层和输出层。
self.net = nn.Sequential(
nn.Linear(input_dim, 64),
nn.ReLU(),
nn.Linear(64, 16),
nn.ReLU(),
nn.Linear(16,8),
nn.ReLU(),
nn.Linear(8,4),
nn.ReLU(),
nn.Linear(4,1) # 单个输出神经元的线性层,用于回归任务
)
# Mean squared error loss
# reduction='mean':损失值会被平均计算
self.criterion = nn.MSELoss(reduction='mean')
def forward(self, x):
''' Given input of size (batch_size x input_dim), compute output of the network '''
return self.net(x).squeeze(1)
def cal_loss(self, pred, target, l1_lambda):
# target:真实的目标值
# l1_lambda:L1正则化的超参数,用于控制正则化的强度
''' Calculate loss '''
# TODO: you may implement L2 regularization here
loss = self.criterion(pred, target)
# L1 regularization
l1_reg = torch.tensor(0.).to(device)
for param in model.parameters():
l1_reg += torch.sum(torch.abs(param))
loss += l1_lambda * l1_reg
return loss
2.3.5 神经网络的训练过程
- 设置训练超参数和优化器: 代码从配置文件中获取了训练超参数,包括最大的训练周期数(n_epochs)、优化器类型(optimizer)、以及优化器的超参数(optim_hparas)。然后,通过 PyTorch 中的 getattr 函数创建了相应类型的优化器(如 Adam、SGD 等)。
- 初始化记录器和计数器: 代码初始化了一些变量,包括损失记录器 loss_record,用于记录每个训练周期的训练和开发(验证)集损失,以及用于早停(Early Stopping)的计数器 early_stop_cnt。
- 开始训练循环: 代码进入了一个训练循环,该循环在最大训练周期数内运行,或者在出现早停情况下提前结束训练。
- 模型训练: 在每个训练周期内,代码设置模型为训练模式(model.train()),然后迭代训练数据集中的每个批次。
- 验证集评估: 每个训练周期结束后,代码使用验证集(开发集)对模型进行评估,计算验证集上的均方误差。如果验证集上的均方误差小于之前的最小值(min_mse),则保存模型参数,并重置早停计数器 early_stop_cnt。这有助于防止过拟合,并在性能改善时保存模型。
- 早停策略: 如果连续 early_stop 个训练周期内都没有性能改善(验证集损失不再降低),训练过程将提前结束。
- 训练结束: 训练结束后,代码打印出训练周期数,然后返回最小的验证集均方误差和损失记录器 loss_record。
def train(tr_set, dv_set, model, config, device):
''' DNN training '''
n_epochs = config['n_epochs'] # Maximum number of epochs
# Setup optimizer
optimizer = getattr(torch.optim, config['optimizer'])(
model.parameters(), **config['optim_hparas'])
min_mse = 1000.
loss_record = {'train': [], 'dev': []} # for recording training loss
early_stop_cnt = 0
epoch = 0
while epoch < n_epochs:
model.train() # set model to training mode
for x, y in tr_set: # iterate through the dataloader
optimizer.zero_grad() # set gradient to zero
x, y = x.to(device), y.to(device) # move data to device (cpu/cuda)
pred = model(x) # forward pass (compute output)
mse_loss = model.cal_loss(pred, y, config['l1_lambda']) # compute loss
mse_loss.backward() # compute gradient (backpropagation)
optimizer.step() # update model with optimizer
loss_record['train'].append(mse_loss.detach().cpu().item())
# After each epoch, test your model on the validation (development) set.
dev_mse = dev(dv_set, model, device)
if dev_mse < min_mse:
# Save model if your model improved
min_mse = dev_mse
print('Saving model (epoch = {:4d}, val_loss = {:.4f})'
.format(epoch + 1, min_mse))
torch.save(model.state_dict(), config['save_path']) # Save model to specified path
early_stop_cnt = 0
else:
early_stop_cnt += 1
epoch += 1
loss_record['dev'].append(dev_mse)
if early_stop_cnt > config['early_stop']:
# Stop training if your model stops improving for "config['early_stop']" epochs.
break
print('Finished training after {} epochs'.format(epoch))
return min_mse, loss_record
2.3.6 模型评估
def dev(dv_set, model, device):
model.eval() # set model to evalutation mode
total_loss = 0
for x, y in dv_set: # iterate through the dataloader
x, y = x.to(device), y.to(device) # move data to device (cpu/cuda)
with torch.no_grad(): # disable gradient calculation
pred = model(x) # forward pass (compute output)
mse_loss = model.cal_loss(pred, y, config['l1_lambda']) # compute loss
total_loss += mse_loss.detach().cpu().item() * len(x) # accumulate loss
total_loss = total_loss / len(dv_set.dataset) # compute averaged loss
return total_loss
2.3.7 模型测试
def test(tt_set, model, device):
model.eval() # set model to evalutation mode
preds = []
for x in tt_set: # iterate through the dataloader
x = x.to(device) # move data to device (cpu/cuda)
with torch.no_grad(): # disable gradient calculation
pred = model(x) # forward pass (compute output)
preds.append(pred.detach().cpu()) # collect prediction
preds = torch.cat(preds, dim=0).numpy() # concatenate all predictions and convert to a numpy array
return preds
2.3.8 模型初始化
初始化训练过程中需要的设备、目录和超参数配置,以便在训练模型之前进行必要的准备工作。
device = get_device() # get the current available device ('cpu' or 'cuda')
os.makedirs('models', exist_ok=True) # The trained model will be saved to ./models/
target_only = True # TODO: Using 40 states & 2 tested_positive features
seed = 459
np.random.seed(seed)
delta = np.random.normal(loc=0,scale = 0.000001)
# TODO: How to tune these hyper-parameters to improve your model's performance?
config = {
'n_epochs': 3000, # maximum number of epochs
'batch_size': 270, # mini-batch size for dataloader
'optimizer': 'Adam', # optimization algorithm (optimizer in torch.optim)
'optim_hparas': { # hyper-parameters for the optimizer (depends on which optimizer you are using)
'lr': 0.003, # learning rate of Adam
#'weight_decay': 1e-8 # weight decay (L2 regularization)
},
'l1_lambda':1e-5 + delta, # L1 regularization
'early_stop': 200, # early stopping epochs (the number epochs since your model's last improvement)
'save_path': 'models/model.pth' # your model will be saved here
}
myseed = 42069 # set a random seed for reproducibility
torch.backends.cudnn.deterministic = True
torch.backends.cudnn.benchmark = False
np.random.seed(myseed)
torch.manual_seed(myseed)
if torch.cuda.is_available():
torch.cuda.manual_seed_all(myseed)
2.3 模型运行
tr_set, mean, std = prep_dataloader(tr_path, 'train', config['batch_size'], target_only=target_only)
dv_set, _, _ = prep_dataloader(tr_path, 'dev', config['batch_size'], target_only=target_only, mean=mean, std=std)
tt_set, _, _ = prep_dataloader(tt_path, 'test', config['batch_size'], target_only=target_only, mean=mean, std=std)
Finished reading the train set of COVID19 Dataset (2160 samples found, each dim = 14)
Finished reading the dev set of COVID19 Dataset (540 samples found, each dim = 14)
Finished reading the test set of COVID19 Dataset (893 samples found, each dim = 14)
model = NeuralNet(tr_set.dataset.dim).to(device) # Construct model and move to device
model_loss, model_loss_record = train(tr_set, dv_set, model, config, device)
plot_learning_curve(model_loss_record, title='deep model')

del model
model = NeuralNet(tr_set.dataset.dim).to(device)
ckpt = torch.load(config['save_path'], map_location='cpu') # Load your best model
model.load_state_dict(ckpt)
if len(dv_set) > 0:
plot_pred(dv_set, model, device) # Show prediction on the validation set
def save_pred(preds, file):
''' Save predictions to specified file '''
print('Saving results to {}'.format(file))
with open(file, 'w') as fp:
writer = csv.writer(fp)
writer.writerow(['id', 'tested_positive'])
for i, p in enumerate(preds):
writer.writerow([i, p])
preds = test(tt_set, model, device) # predict COVID-19 cases with your model
save_pred(preds, 'COVID-19 pred.csv') # save prediction file to COVID-19 pred.csv