学校项目培训之Carla仿真平台之Carla学习内容
一、Blender
Blender入门:https://www.bilibili.com/video/BV1fb4y1e7PD/
Blender导入骨骼:https://www.bilibili.com/video/BV1hc41157nL
做一个车:https://www.bilibili.com/video/BV1hY411q7w2


二、Roadrunner
RoadRunner Scenario+CARLA联合仿真
三、Blender中导入汽车骨骼
carla仿真器搭建及特定车辆模型的导入
里面有两个视频,无声的看小车的骨骼构建,有声的看小车导入UE:
How to add a vehicle/truck in carla using Unreal Engine Editor 4 + Blender for beginners
How to rig vehicle in Blender 2.8 for UE4 [No Sound] _ Blender 2.8, Unreal Engine 4
建议先做一个简单的小车学习导入流程,汽车做的太豪华,导入的时候没卡出来
以下过程中,每个步骤有编译的的地方点一下,有保存的地方点一下
-
UE4中导入小车的fbx
-
在物理资产中设置骨骼

进入编辑:
-
添加动画蓝图,直接去现有的车辆动画蓝图复制过来


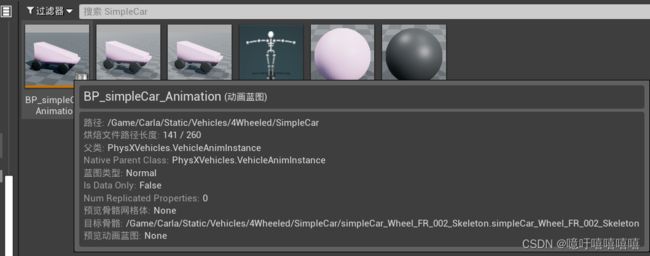
进入编辑: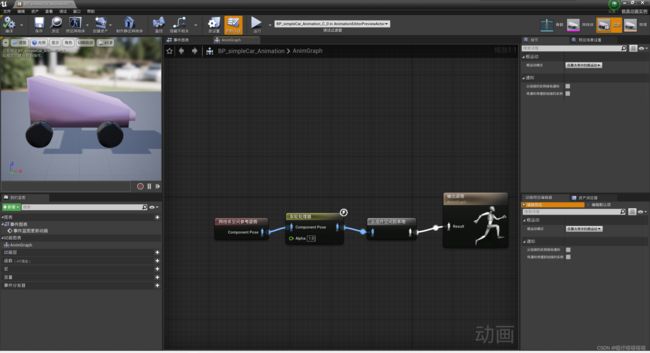
-
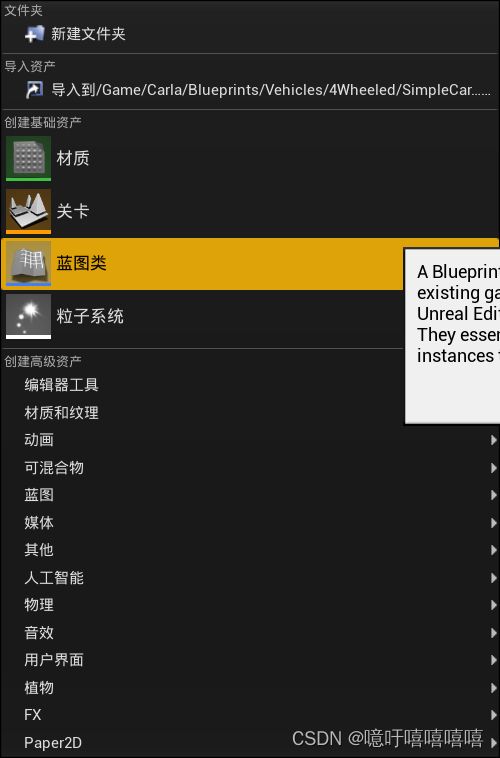
添加轮子的蓝图
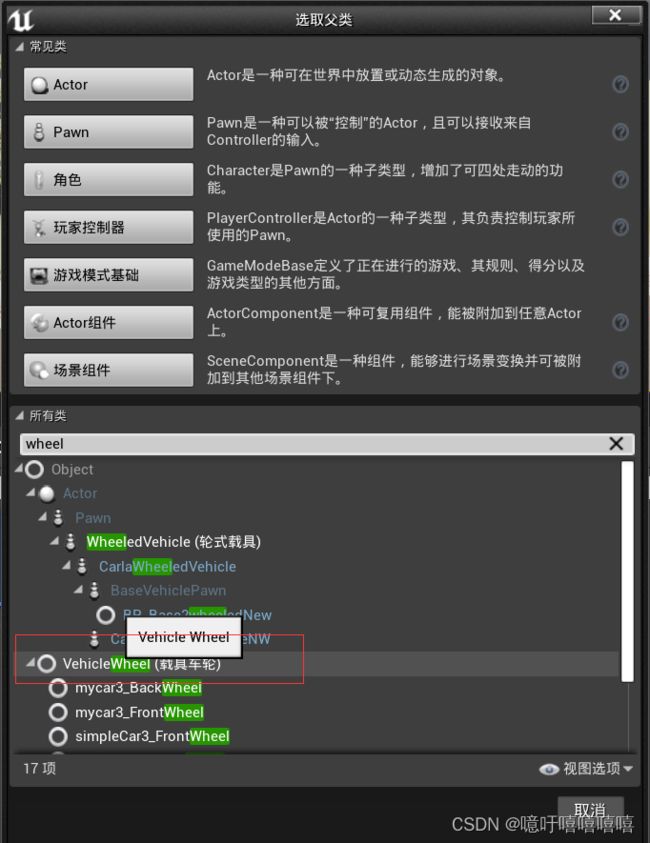
进入编辑:
前轮胎: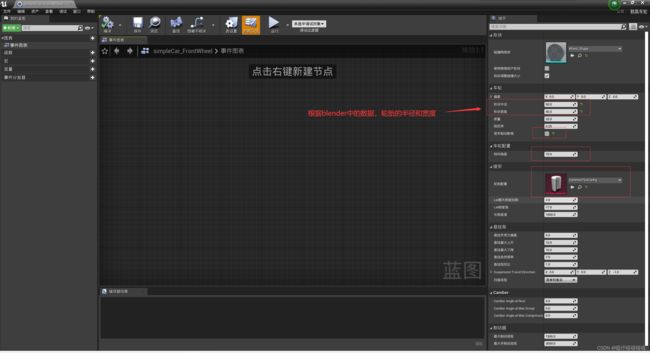
后轮胎: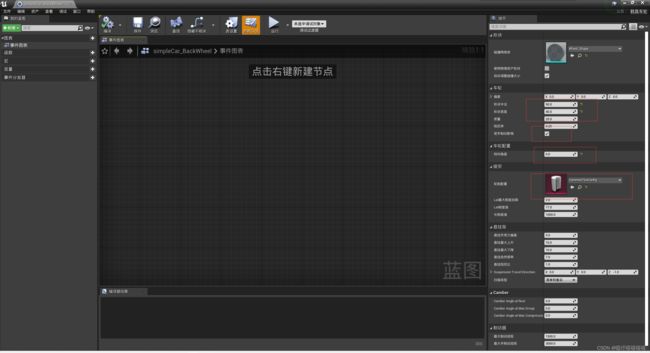
-
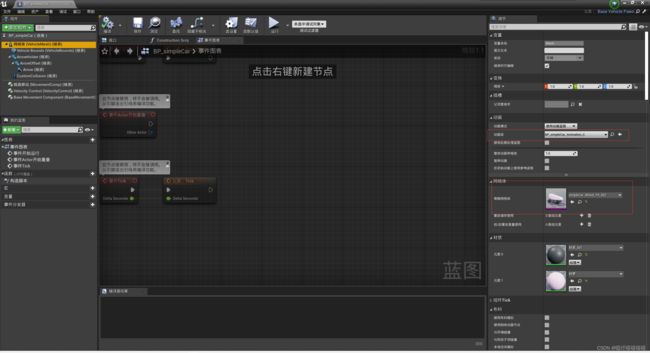
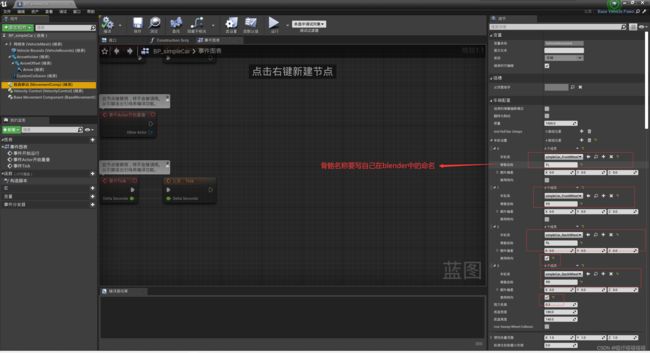
新建汽车蓝图类

进入编辑:
-
编辑汽车资产库
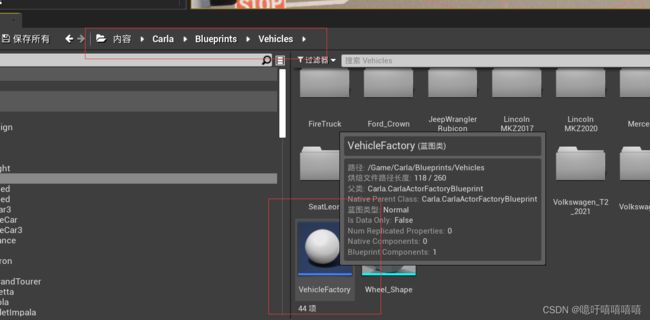
进入编辑:
(这里写错了,是 SimpleCar和SimpleCar01)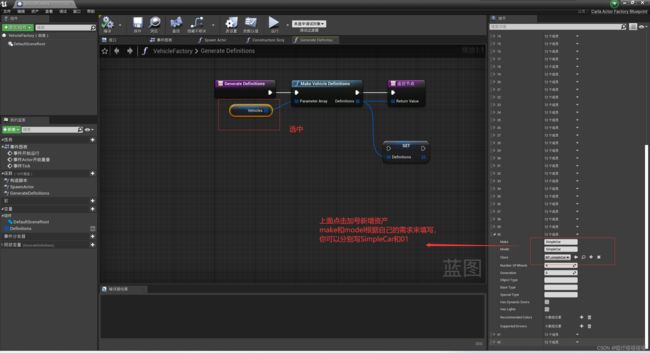 好了,此时就可以运行看看了。
好了,此时就可以运行看看了。
python manual_control.py --filter SimplerCar01
四、小车等待红绿灯code
# ==============================================================================
# -- find carla module ---------------------------------------------------------
# ==============================================================================
import glob
import math
import os
import random
import sys
try:
sys.path.append(glob.glob('../carla/dist/carla-*%d.%d-%s.egg' % (
sys.version_info.major,
sys.version_info.minor,
'win-amd64' if os.name == 'nt' else 'linux-x86_64'))[0])
except IndexError:
pass
import carla
def hld(world, vehicle, vehicle_max_speed):
global vehicle_current_location
global way_near_point
global distance_to_intersection
# if vehicle:
# # 获取汽车当前位置
# vehicle_current_location = vehicle.get_location()
# # 使用Carla的道路地图获取最近的路口(交叉口)Waypoint
# waypoint_location = world.get_map().get_waypoint(vehicle_current_location).transform.location
# # 使用Waypoint的distance属性获取距离路口的距离
# print(vehicle_current_location)
# print(waypoint_location)
# distance_to_intersection = math.sqrt((vehicle_current_location.x - waypoint_location.x) ** 2 + (
# vehicle_current_location.y - waypoint_location.y) ** 2)
# print("The neaerest way point's distance is:", distance_to_intersection, "meters")
# else:
# print("_________________Not found the vehicle !_________________")
# return
# 获取汽车的速度
vehicle_current_velocity = vehicle.get_velocity()
vehicle_current_speed = vehicle_current_velocity.length() # 线速度
print("vehicle_current_speed______", vehicle_current_speed)
# 判断汽车当前是否处于红绿灯影响范围
if vehicle.is_at_traffic_light():
# 获取红绿灯
traffic_light = vehicle.get_traffic_light()
print("traffic_light.get_state()______", traffic_light.get_state())
# 如果前方是红灯并且距离路口只有0.5m了,制动汽车
if traffic_light and traffic_light.get_state() == carla.TrafficLightState.Red:
print("红灯请停车!")
# target_velocity = max(vehicle_current_speed - 5.0, 0.0) # 以5m/s的速度减速,
vehicle.apply_control(carla.VehicleControl(throttle=-0.0, steer=0, brake=1.0))
# 如果前方是绿灯
elif traffic_light and traffic_light.get_state() == carla.TrafficLightState.Green:
# 如果当前是静止的状态,则让汽车启动
if vehicle_current_speed == 0.0:
print("绿灯请行驶!")
vehicle.apply_control(carla.VehicleControl(throttle=1.0, steer=0.0, brake=0.0))
# 如果当前是行驶状态并且速度大于最大速度限制的一半,则让其保持当前速度行驶
elif vehicle_current_speed > (vehicle_max_speed / 2.0):
print("路口请缓行!")
vehicle.apply_control(carla.VehicleControl(throttle=0.0, steer=0.0, brake=0.0))
# 其他情况,则保持当前速度行驶
else :
print("绿灯请缓行!")
vehicle.apply_control(carla.VehicleControl(throttle=0.5, steer=0.0, brake=0.0))
# 如果前方是黄灯,则汽车开始制动
elif traffic_light and traffic_light.get_state() == carla.TrafficLightState.Yellow:
print("黄灯请停车!")
vehicle.apply_control(carla.VehicleControl(throttle=0.0, steer=0.0, brake=1.0))
else:
print("直线行驶中~~~")
# 如果汽车的速度超过了最大速度,则让他保持当前速度行驶
speed_tolerance = 0.5 # 设置速度容忍范围,可以根据需要调整
# 计算油门值,使车辆保持在最大速度附近
if vehicle_current_speed < vehicle_max_speed - speed_tolerance:
# print("start throttle")
throttle = 1.0 # 假设油门力度为1.0
else:
# print("stop throttle")
throttle = 0.0 # 达到最大速度时,停止加油门
vehicle.apply_control(carla.VehicleControl(throttle=throttle, steer=0.0, brake=0.0))
def main():
actor_list = []
client = carla.Client('127.0.0.1', 2000)
client.set_timeout(2.0)
try:
# 获取世界
world = client.get_world()
# 创建汽车蓝图
# vehicle_blueprint = random.choice(world.get_blueprint_library().filter('vehicle.*'))
# 选用自定义小车蓝图
vehicle_blueprint = world.get_blueprint_library().filter('vehicle.simplecar.simplecar')
# vehicle_spawn_points = random.choice(world.get_map().get_spawn_points())
vehicle_spawn_points = carla.Transform(
carla.Location(x=20.235275, y=13.414804, z=0.600000), # 设置初始位置的x、y和z坐标
carla.Rotation(pitch=0.000000, yaw=-179.840790, roll=0.000000) # 设置初始方向的pitch、yaw和roll角度
)
print("vehicle_spawn_points: ",vehicle_spawn_points)
vehicle = world.spawn_actor(vehicle_blueprint, vehicle_spawn_points)
# 设置最大车速
vehicle_max_speed = 7.0
actor_list.append(vehicle)
# 创建相机蓝图
camera_blueprint = world.get_blueprint_library().find('sensor.camera.rgb')
camera_spawn_points = carla.Transform(carla.Location(x=-5, z=4), carla.Rotation(pitch=-20))
camera = world.spawn_actor(camera_blueprint, camera_spawn_points, attach_to=vehicle)
# camera.listen(lambda image: image.save_to_disk(os.path.join('_out', '%06d.png' % image.frame)))
actor_list.append(camera)
while True:
# 设置相机视角
world.get_spectator().set_transform(camera.get_transform())
hld(world, vehicle, vehicle_max_speed)
# 优化循环性能
world.tick()
finally:
client.apply_batch([carla.command.DestroyActor(x) for x in actor_list])
print("All the actors have already been destroied !")
if __name__ == "__main__":
main()
五、两个小车跟车code
import carla
import math
import random
import time
# 创建CARLA仿真客户端
client = carla.Client('127.0.0.1', 2000)
client.set_timeout(2.0)
actor_list=[]
try:
# ======================================获取CARLA世界和地图======================================
world = client.get_world()
blueprint_library = world.get_blueprint_library()
map = world.get_map()
# ======================================创建两辆车======================================
# 位置设置
# spawn_points = map.get_spawn_points()
spawn_points = carla.Transform(
carla.Location(x=20.235275, y=13.414804, z=0.600000), # 设置初始位置的x、y和z坐标
carla.Rotation(pitch=0.000000, yaw=-179.840790, roll=0.000000) # 设置初始方向的pitch、yaw和roll角度
)
# 主车
# vehicle_bp1 = blueprint_library.filter('vehicle')[0]
# vehicle_bp1.set_attribute('color', '255,0,0')
# 自定义小车
vehicle_bp1 = blueprint_library.find('vehicle.simplecar.simplecar')
# vehicle1_spawn_point = random.choice(spawn_points)
vehicle1_spawn_point = spawn_points
vehicle1 = world.spawn_actor(vehicle_bp1, vehicle1_spawn_point)
# 跟车
# vehicle_bp2 = blueprint_library.filter('vehicle')[0]
# vehicle_bp2.set_attribute('color', '0,0,255')
# 自定义小车
vehicle_bp2 = blueprint_library.find('vehicle.simplecar3.simplecar3')
vehicle2_spawn_point = carla.Transform(vehicle1_spawn_point.location + carla.Location(x=10.0),carla.Rotation(pitch=0.000000, yaw=-179.840790, roll=0.000000))
vehicle2 = world.spawn_actor(vehicle_bp2, vehicle2_spawn_point)
# 设置车辆的初始速度
vehicle1.apply_control(carla.VehicleControl(throttle=0.5, steer=0, brake=0)) # 车1的初始速度为10 m/s
vehicle2.apply_control(carla.VehicleControl(throttle=0, steer=0, brake=0))
actor_list.append(vehicle1)
actor_list.append(vehicle2)
# # 给两个车设置自动驾驶
# vehicle1.set_autopilot(True)
# vehicle2.set_autopilot(True)
# ======================================创建相机蓝图======================================
camera_blueprint = world.get_blueprint_library().find('sensor.camera.rgb')
camera_transform = carla.Transform(carla.Location(x=-5, z=4), carla.Rotation(pitch=-10))
camera1 = world.spawn_actor(camera_blueprint, camera_transform, attach_to=vehicle1)
camera2 = world.spawn_actor(camera_blueprint, camera_transform, attach_to=vehicle2)
# camera.listen(lambda image: image.save_to_disk(os.path.join('_out', '%06d.png' % image.frame)))
actor_list.append(camera1)
actor_list.append(camera2)
# ======================================定义跟车参数======================================
desired_distance = 20.0 # 期望的跟车距离
max_velocity = 1.0 # 最大速度 (m/s)
while True:
# 设置相机视角
world.get_spectator().set_transform(camera2.get_transform())
# 获取车辆的位置
location1 = vehicle1.get_location()
location2 = vehicle2.get_location()
# 计算车辆之间的距离
distance = math.sqrt((location1.x - location2.x)**2 + (location1.y - location2.y)**2)
# 计算车辆2的期望速度,使其保持在期望跟车距离内
target_speed = 0.0 if desired_distance > distance else max_velocity
# 设置车辆2的速度
vehicle2.apply_control(carla.VehicleControl(throttle=target_speed, steer=0, brake=0))
# 打印信息
print(f"Distance between vehicles: {distance:.2f} m, Target Speed for Vehicle 2: {vehicle2.get_velocity().length():.2f} m/s")
world.tick()
finally:
client.apply_batch([carla.command.DestroyActor(x) for x in actor_list])
print("All the actors have already been destroied !")
六、前车实现等红绿灯+后车实现跟车code
import glob
import math
import os
import random
import sys
try:
sys.path.append(glob.glob('../carla/dist/carla-*%d.%d-%s.egg' % (
sys.version_info.major,
sys.version_info.minor,
'win-amd64' if os.name == 'nt' else 'linux-x86_64'))[0])
except IndexError:
pass
import carla
# ======================================后车执行跟车逻辑======================================
def follow(vehicle1, vehicle2, max_speed, desired_distance,):
# 获取车辆的位置
location1 = vehicle1.get_location()
location2 = vehicle2.get_location()
# 获取汽车的速度
vehicle2_current_velocity = vehicle2.get_velocity()
vehicle2_current_speed = vehicle2_current_velocity.length() # 线速度
# 计算车辆之间的距离
distance = math.sqrt((location1.x - location2.x) ** 2 + (location1.y - location2.y) ** 2)
# 设置车辆2的速度
if desired_distance>distance:
vehicle2.apply_control(carla.VehicleControl(throttle=0.0, steer=0, brake=0))
else:
# 如果汽车的速度超过了最大速度,则让他保持当前速度行驶
speed_tolerance = 0 # 设置速度容忍范围,可以根据需要调整
# 计算油门值,使车辆保持在最大速度附近
if vehicle2_current_speed < max_speed - speed_tolerance or desired_distance>distance:
# print("start throttle")
throttle = 1.0 # 假设油门力度为1.0
else:
# print("stop throttle")
throttle = 0.1 # 达到最大速度时,停止加油门
vehicle2.apply_control(carla.VehicleControl(throttle=throttle, steer=0.0, brake=0.0))
# 打印信息
print(
f"Distance between vehicles: {distance:.2f} m, Target Speed for Vehicle 2: {vehicle2.get_velocity().length():.2f} m/s")
# ======================================主车执行红绿灯逻辑======================================
def hld(world, vehicle, vehicle_max_speed):
global vehicle_current_location
global way_near_point
global distance_to_intersection
# if vehicle:
# # 获取汽车当前位置
# vehicle_current_location = vehicle.get_location()
# # 使用Carla的道路地图获取最近的路口(交叉口)Waypoint
# waypoint_location = world.get_map().get_waypoint(vehicle_current_location).transform.location
# # 使用Waypoint的distance属性获取距离路口的距离
# print(vehicle_current_location)
# print(waypoint_location)
# distance_to_intersection = math.sqrt((vehicle_current_location.x - waypoint_location.x) ** 2 + (
# vehicle_current_location.y - waypoint_location.y) ** 2)
# print("The neaerest way point's distance is:", distance_to_intersection, "meters")
# else:
# print("_________________Not found the vehicle !_________________")
# return
# 获取汽车的速度
vehicle_current_velocity = vehicle.get_velocity()
vehicle_current_speed = vehicle_current_velocity.length() # 线速度
print("vehicle_current_speed______", vehicle_current_speed)
# 判断汽车当前是否处于红绿灯影响范围
if vehicle.is_at_traffic_light():
# 获取红绿灯
traffic_light = vehicle.get_traffic_light()
print("traffic_light.get_state()______", traffic_light.get_state())
# 如果前方是红灯并且距离路口只有0.5m了,制动汽车
if traffic_light and traffic_light.get_state() == carla.TrafficLightState.Red:
print("红灯请停车!")
# target_velocity = max(vehicle_current_speed - 5.0, 0.0) # 以5m/s的速度减速,
vehicle.apply_control(carla.VehicleControl(throttle=-0.0, steer=0, brake=1.0))
# 如果前方是绿灯
elif traffic_light and traffic_light.get_state() == carla.TrafficLightState.Green:
# 如果当前是静止的状态,则让汽车启动
if vehicle_current_speed == 0.0:
print("绿灯请行驶!")
vehicle.apply_control(carla.VehicleControl(throttle=1.0, steer=0.0, brake=0.0))
# 如果当前是行驶状态并且速度大于最大速度限制的一半,则让其保持当前速度行驶
elif vehicle_current_speed > (vehicle_max_speed / 2.0):
print("路口请缓行!")
vehicle.apply_control(carla.VehicleControl(throttle=0.0, steer=0.0, brake=0.0))
# 其他情况,则保持当前速度行驶
else:
print("绿灯请缓行!")
vehicle.apply_control(carla.VehicleControl(throttle=0.5, steer=0.0, brake=0.0))
# 如果前方是黄灯,则汽车开始制动
elif traffic_light and traffic_light.get_state() == carla.TrafficLightState.Yellow:
print("黄灯请停车!")
vehicle.apply_control(carla.VehicleControl(throttle=0.0, steer=0.0, brake=1.0))
else:
print("直线行驶中~~~")
# 如果汽车的速度超过了最大速度,则让他保持当前速度行驶
speed_tolerance = 0.5 # 设置速度容忍范围,可以根据需要调整
# 计算油门值,使车辆保持在最大速度附近
if vehicle_current_speed < vehicle_max_speed - speed_tolerance:
# print("start throttle")
throttle = 1.0 # 假设油门力度为1.0
else:
# print("stop throttle")
throttle = 0.0 # 达到最大速度时,停止加油门
vehicle.apply_control(carla.VehicleControl(throttle=throttle, steer=0.0, brake=0.0))
# 创建CARLA仿真客户端
client = carla.Client('127.0.0.1', 2000)
client.set_timeout(2.0)
actor_list = []
try:
# ======================================获取CARLA世界和地图======================================
world = client.get_world()
blueprint_library = world.get_blueprint_library()
map = world.get_map()
# ======================================创建两辆车======================================
# 位置设置
# spawn_points = map.get_spawn_points()
# vehicle1_spawn_point = random.choice(spawn_points)
# print(vehicle1_spawn_point)
# 自定义小车位置
spawn_points = carla.Transform(
carla.Location(x=400, y=-0.6, z=4.000000), carla.Rotation(pitch=0.000000, yaw=-180, roll=0.000000))
vehicle1_spawn_point = spawn_points
print(vehicle1_spawn_point)
# 主车
# vehicle_bp1 = blueprint_library.filter('vehicle')[0]
# vehicle_bp1.set_attribute('color', '255,0,0')
# 自定义小车
vehicle_bp1 = blueprint_library.find('vehicle.simplecar.simplecar')
vehicle1 = world.spawn_actor(vehicle_bp1, vehicle1_spawn_point)
# 跟车
# vehicle_bp2 = blueprint_library.filter('vehicle')[0]
# vehicle_bp2.set_attribute('color', '0,0,255')
# 自定义小车
vehicle_bp2 = blueprint_library.find('vehicle.simplecar3.simplecar3')
vehicle2_spawn_point = carla.Transform(vehicle1_spawn_point.location + carla.Location(x=10.0),
carla.Rotation(pitch=0.000000, yaw=-180, roll=0.000000))
vehicle2 = world.spawn_actor(vehicle_bp2, vehicle2_spawn_point)
# 设置车辆的初始速度
vehicle1.apply_control(carla.VehicleControl(throttle=0.5, steer=0, brake=0)) # 车1的初始速度为10 m/s
vehicle2.apply_control(carla.VehicleControl(throttle=0, steer=0, brake=0))
actor_list.append(vehicle1)
actor_list.append(vehicle2)
# # 给两个车设置自动驾驶
# vehicle1.set_autopilot(True)
# vehicle2.set_autopilot(True)
# ======================================创建相机蓝图======================================
camera_blueprint = world.get_blueprint_library().find('sensor.camera.rgb')
camera_transform = carla.Transform(carla.Location(x=-5, z=4), carla.Rotation(pitch=-10))
camera1 = world.spawn_actor(camera_blueprint, camera_transform, attach_to=vehicle1)
camera2 = world.spawn_actor(camera_blueprint, camera_transform, attach_to=vehicle2)
# camera.listen(lambda image: image.save_to_disk(os.path.join('_out', '%06d.png' % image.frame)))
actor_list.append(camera1)
actor_list.append(camera2)
# ======================================定义跟车参数======================================
desired_distance = 15.0 # 期望的跟车距离
max_velocity = 1.0 # 最大速度 (m/s)
max_speed = 7.0 # 最大速度 (m/s)
while True:
# 设置相机视角
world.get_spectator().set_transform(camera2.get_transform())
# 主车执行红绿灯
hld(world, vehicle1, max_speed)
# 后车执行跟车
follow(vehicle1, vehicle2, max_speed, desired_distance)
world.tick()
finally:
client.apply_batch([carla.command.DestroyActor(x) for x in actor_list])
print("All the actors have already been destroied !")
七、实现效果
跟车+红绿灯+roadRunner+有红灯停下效果 15m