ODE的buggy例程分析
ODE (Open Dynamic Engine) 是一个免费的具有工业品质的刚体动力学的库,一款优秀的开源物理引擎。它能很好地仿真现实环境中的可移动物体,而且它有内建的碰撞检测系统。
最近从网上看到了ODE,不禁有一种跃跃欲试的冲动,于是这两天就小试了一下。虽然ODE这个库已经使用了十几年了,但是资料还是比较少,中文的更是寥寥可数,只有几篇官网教程的翻译,也只有前几章的,不是很全。貌似这种日本做的东西,文档做的都不是很好呀。以下是几篇教程的链接:
ODE文档的部分翻译:
http://www.cnblogs.com/muxi/archive/2012/03/13/2394752.html
ODE 教程:
http://bbs.sjtu.edu.cn/bbscon,board,GNULinux,file,M.1274284081.A.html
http://hi.baidu.com/ujbiogeffebcmnd/item/86a926cbadea4227e80f2ef0
没办法,就开始看官方源码中的demo,今天花了一下午时间看了buggy的例程,对照着在线手册了解了程序中的API,简单做了一下中文注释。
/*************************************************************************
* *
* Open Dynamics Engine, Copyright (C) 2001,2002 Russell L. Smith. *
* All rights reserved. Email: russ@q12.org Web: www.q12.org *
* *
* This library is free software; you can redistribute it and/or *
* modify it under the terms of EITHER: *
* (1) The GNU Lesser General Public License as published by the Free *
* Software Foundation; either version 2.1 of the License, or (at *
* your option) any later version. The text of the GNU Lesser *
* General Public License is included with this library in the *
* file LICENSE.TXT. *
* (2) The BSD-style license that is included with this library in *
* the file LICENSE-BSD.TXT. *
* *
* This library is distributed in the hope that it will be useful, *
* but WITHOUT ANY WARRANTY; without even the implied warranty of *
* MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the files *
* LICENSE.TXT and LICENSE-BSD.TXT for more details. *
* *
*************************************************************************/
/*
buggy with suspension.
this also shows you how to use geom groups.
*/
#define dSINGLE //定义为单精度
#include <ode/ode.h>
#include <drawstuff/drawstuff.h>
#define DRAWSTUFF_TEXTURE_PATH "textures" //纹理文件的路径
// select correct drawing functions
#ifdef dDOUBLE
#define dsDrawBox dsDrawBoxD
#define dsDrawSphere dsDrawSphereD
#define dsDrawCylinder dsDrawCylinderD
#define dsDrawCapsule dsDrawCapsuleD
#endif
// some constants
#define LENGTH 0.7 // 车壳长度
#define WIDTH 0.5 // 车壳宽度
#define HEIGHT 0.2 // 车壳高度
#define RADIUS 0.18 // 轮子半径
#define STARTZ 0.5 // 开始车壳的位置
#define CMASS 1 // 车壳的质量
#define WMASS 0.2 // 轮子的质量
// dynamics and collision objects (chassis, 3 wheels, environment)
static dWorldID world; //动力学计算使用的world
static dSpaceID space; //检测碰撞使用的space
static dBodyID body[4]; //设置车体的ID(三个轮子,一个车体)
static dJointID joint[3]; // joint[0]是前轮
static dJointGroupID contactgroup;
static dGeomID ground; //大地
static dSpaceID car_space;
static dGeomID box[1]; //车体geom的ID
static dGeomID sphere[3]; //车轮geom的ID
static dGeomID ground_box; //障碍物geom的ID
// things that the user controls
static dReal speed=0,steer=0; // 用户命令
// 碰撞检测的callback函数
static void nearCallback (void *data, dGeomID o1, dGeomID o2)
{
int i,n;
// 选择碰撞检测中的2个中的一个作为标志;
// 如果有一个碰撞物为ground或者障碍物则把标志位g1\g2置为1
int g1 = (o1 == ground || o1 == ground_box);
int g2 = (o2 == ground || o2 == ground_box);
if (!(g1 ^ g2)) return;
const int N = 10; //接触点的上限是10个
dContact contact[N];
n = dCollide (o1,o2,N,&contact[0].geom,sizeof(dContact)); //n是碰撞的次数
if (n > 0) {
for (i=0; i<n; i++) {
contact[i].surface.mode = dContactSlip1 | dContactSlip2 |
dContactSoftERP | dContactSoftCFM | dContactApprox1; //设定地面模式
contact[i].surface.mu = dInfinity; //库伦摩擦系数(dInfinity:无穷大)
contact[i].surface.slip1 = 0.1; //滑动系数
contact[i].surface.slip2 = 0.1;
contact[i].surface.soft_erp = 0.5; //这两个好像是设置柔软度的
contact[i].surface.soft_cfm = 0.3;
//生成contactjoint
dJointID c = dJointCreateContact (world,contactgroup,&contact[i]);
//用contactjoint对接触的两个geom进行约束
dJointAttach (c,
dGeomGetBody(contact[i].geom.g1),
dGeomGetBody(contact[i].geom.g2));
}
}
}
// 开始仿真,这是视角
static void start()
{
dAllocateODEDataForThread(dAllocateMaskAll);
static float xyz[3] = {0.8317f,-0.9817f,0.8000f}; //视线的位置
static float hpr[3] = {121.0000f,-27.5000f,0.0000f}; //视线的方向
dsSetViewpoint (xyz,hpr); //设定视线
printf ("Press:\t'a' to increase speed.\n"
"\t'z' to decrease speed.\n"
"\t',' to steer left.\n"
"\t'.' to steer right.\n"
"\t' ' to reset speed and steering.\n"
"\t'1' to save the current state to 'state.dif'.\n");
}
//键盘操作的回调函数
static void command (int cmd)
{
switch (cmd) {
case 'a': case 'A':
speed += 0.3;
break;
case 'z': case 'Z':
speed -= 0.3;
break;
case ',':
steer -= 0.5;
break;
case '.':
steer += 0.5;
break;
case ' ':
speed = 0;
steer = 0;
break;
case '1': {
FILE *f = fopen ("state.dif","wt");
if (f) {
dWorldExportDIF (world,f,"");
fclose (f);
}
}
}
}
// 仿真循环
// 电机驱动和转向驱动都是在前轮
static void simLoop (int pause)
{
int i;
if (!pause) {
// motor
dJointSetHinge2Param (joint[0],dParamVel2,-speed); //设置期望速度
dJointSetHinge2Param (joint[0],dParamFMax2,0.1); //电机驱动的最大扭力
// steering
dReal v = steer - dJointGetHinge2Angle1 (joint[0]);
if (v > 0.1) v = 0.1;
if (v < -0.1) v = -0.1;
v *= 10.0;
dJointSetHinge2Param (joint[0],dParamVel,v);
dJointSetHinge2Param (joint[0],dParamFMax,0.2);
dJointSetHinge2Param (joint[0],dParamLoStop,-0.75); //最小停止角度
dJointSetHinge2Param (joint[0],dParamHiStop,0.75); //最大停止角度
dJointSetHinge2Param (joint[0],dParamFudgeFactor,0.1); //防止启动跳动
dSpaceCollide (space,0,&nearCallback); //碰撞检测,最初写入的值
dWorldStep (world,0.05); //决定simulation的stepsize
// remove all contact joints
dJointGroupEmpty (contactgroup); //将contactgroup置空
}
//DrawStuff绘制
dsSetColor (0,1,1); //颜色切换
dsSetTexture (DS_WOOD); //纹理切换
dReal sides[3] = {LENGTH,WIDTH,HEIGHT}; //车壳的尺寸
dsDrawBox (dBodyGetPosition(body[0]),dBodyGetRotation(body[0]),sides); //绘制车壳
dsSetColor (1,1,1);
for (i=1; i<=3; i++) dsDrawCylinder (dBodyGetPosition(body[i]),
dBodyGetRotation(body[i]),0.02f,RADIUS); //绘制车轮
dVector3 ss;
dGeomBoxGetLengths (ground_box,ss);
dsDrawBox (dGeomGetPosition(ground_box),dGeomGetRotation(ground_box),ss); //绘制障碍
}
int main (int argc, char **argv)
{
int i;
dMass m;
// setup pointers to drawstuff callback functions
dsFunctions fn; // drawstuff结构体
fn.version = DS_VERSION; // drawstuff的版本
fn.start = &start; // 仿真的前处理函数
fn.step = &simLoop; // 仿真的每一步被调用的函数
fn.command = &command; // 键盘输入
fn.stop = 0; // 没有函数,因此设定为NULL指针
fn.path_to_textures = DRAWSTUFF_TEXTURE_PATH; // 纹理文件的路径
// create world
dInitODE2(0); //初始化ODE环境
world = dWorldCreate(); //创建世界
space = dHashSpaceCreate (0); //创建碰撞检测用space,返回它的ID。
contactgroup = dJointGroupCreate (0); //生成jointGroup
dWorldSetGravity (world,0,0,-0.5); //重力加速度
ground = dCreatePlane (space,0,0,1,0); //创建一个ground
// 创建车体
body[0] = dBodyCreate (world);
dBodySetPosition (body[0],0,0,STARTZ); //设置初始位置
dMassSetBox (&m,1,LENGTH,WIDTH,HEIGHT);
dMassAdjust (&m,CMASS);
dBodySetMass (body[0],&m); //设置质量
box[0] = dCreateBox (0,LENGTH,WIDTH,HEIGHT); //生成车体的geom
dGeomSetBody (box[0],body[0]); //设置车体中的geom,给物体的两个属性形状geom和刚体body添加关联。
// wheel bodies
for (i=1; i<=3; i++) {
body[i] = dBodyCreate (world); //创建车轮的body
dQuaternion q;
dQFromAxisAndAngle (q,1,0,0,M_PI*0.5); //计算车轮的旋转角度
dBodySetQuaternion (body[i],q); //设置车轮的旋转角度
dMassSetSphere (&m,1,RADIUS);
dMassAdjust (&m,WMASS);
dBodySetMass (body[i],&m); //设置质量
sphere[i-1] = dCreateSphere (0,RADIUS);
dGeomSetBody (sphere[i-1],body[i]); //设置geom
}
dBodySetPosition (body[1],0.5*LENGTH,0,STARTZ-HEIGHT*0.5); //设置初始位置
dBodySetPosition (body[2],-0.5*LENGTH, WIDTH*0.5,STARTZ-HEIGHT*0.5);
dBodySetPosition (body[3],-0.5*LENGTH,-WIDTH*0.5,STARTZ-HEIGHT*0.5);
// front and back wheel hinges
for (i=0; i<3; i++) {
joint[i] = dJointCreateHinge2 (world,0); //创建joint
dJointAttach (joint[i],body[0],body[i+1]); //设置joint的连接体
const dReal *a = dBodyGetPosition (body[i+1]); //获取位置
dJointSetHinge2Anchor (joint[i],a[0],a[1],a[2]); //设置joint的位置
dJointSetHinge2Axis1 (joint[i],0,0,1); //设置旋转轴
dJointSetHinge2Axis2 (joint[i],0,1,0);
}
// 设置joint的悬挂参数
// 如果不需要悬挂可以将参数设置为0
for (i=0; i<3; i++) {
dJointSetHinge2Param (joint[i],dParamSuspensionERP,0.4);
dJointSetHinge2Param (joint[i],dParamSuspensionCFM,0.8);
}
// 固定后面两个轮子
for (i=1; i<3; i++) {
// set stops to make sure wheels always stay in alignment
dJointSetHinge2Param (joint[i],dParamLoStop,0);
dJointSetHinge2Param (joint[i],dParamHiStop,0);
}
// 创建car的space,并且包含在总的space中
car_space = dSimpleSpaceCreate (space);
dSpaceSetCleanup (car_space,0);
dSpaceAdd (car_space,box[0]);
dSpaceAdd (car_space,sphere[0]);
dSpaceAdd (car_space,sphere[1]);
dSpaceAdd (car_space,sphere[2]);
// 设置障碍
ground_box = dCreateBox (space,2,1.5,1);
dMatrix3 R;
dRFromAxisAndAngle (R,0,1,0,-0.15);
dGeomSetPosition (ground_box,2,0,-0.34);
dGeomSetRotation (ground_box,R);
// run simulation
dsSimulationLoop (argc,argv,352,288,&fn);
dGeomDestroy (box[0]);
dGeomDestroy (sphere[0]);
dGeomDestroy (sphere[1]);
dGeomDestroy (sphere[2]);
dJointGroupDestroy (contactgroup);
dSpaceDestroy (space);
dWorldDestroy (world);
dCloseODE();
return 0;
}
运行效果:
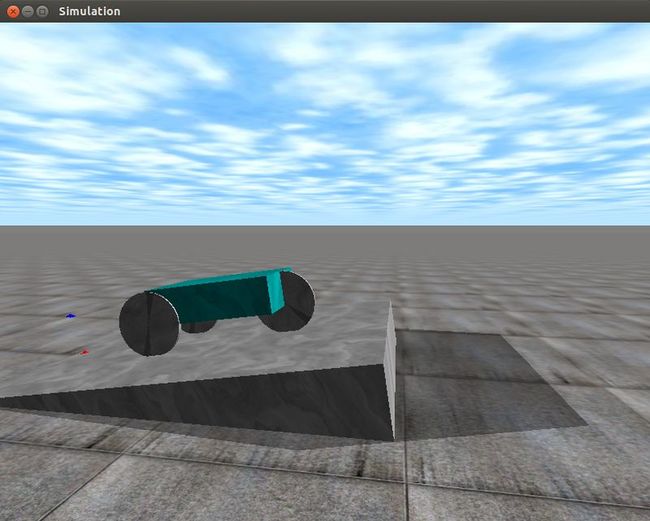
程序中比较难理解的是一些参数的设置和API的使用。
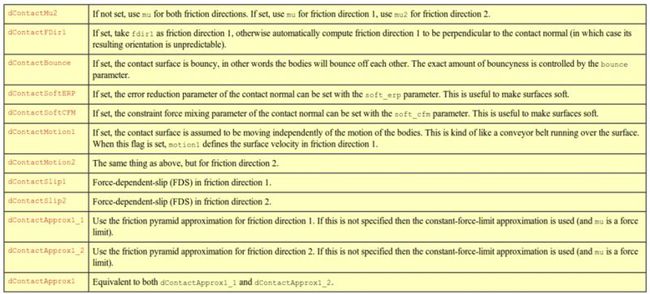
当发生碰撞时,调用回调函数nearCallback,其中需要设置一些碰撞点的参数,具体的参数可以参考用户手册中的说明:
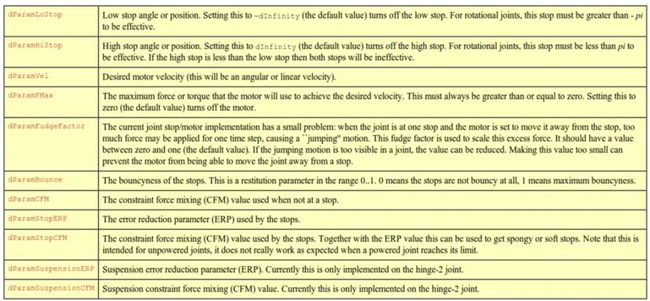
joint的配置中也有一些参数的设置:
以上均参考在线文档:
API手册:http://robotics.naist.jp/~akihiko-y/doxy/ode0.9/index.html
用户手册:http://www.ode.org/ode-latest-userguide.html