人工智能——与或图的搜索
与或图的搜索

与或图是一个超图,节点间通过连接符连接
超图(Hypergraph)是什么
简单的来说,对于我们熟悉的图而言,它的一个边(edge)只能和两个顶点连接;而对于超图来讲,人们定义它的边(这里叫超边,hyperedge)可以和任意个数的顶点连接。一个图和超图的示意图如下所示:
而对于超图的一个严格的数学定义,维基百科上是这样写的:
In mathematics, a hypergraph is a generalization of a graph, where an edge can connect any number of vertices. Formally, a hypergraph H is a pair H = (X,E) where X is a set of elements, called nodes or vertices, and E is a set of non-empty subsets of X called hyperedges or links.
k-均匀超图(k-uniform hypergraph)
对于超图而言,还有一个k-均匀超图的概念(k-uniform hypergraph)。它指超图的每个边连接的顶点个数都是相同的,即为个数k。所以2-均匀超图就是我们传统意义上的图,3-均匀超图就是一个三元组的集合,以此类推。
此段摘自: http://blog.csdn.net/raodotcong/article/details/6429991
耗散值的计算:
k(n, N) = Cn+k(n1, N)+…+k(ni, N) 其中:N为终节点集 Cn为连接符的耗散值
能解节点:
终节点是能解节点
若非终节点有“或”子节点时,当且仅当其子节点至少有一能解时,该非终节点才能解。
若非终节点有“与”子节点时,当且仅当其子节点均能解时,该非终节点才能解。
不能解节点:
没有后裔的非终节点是不能解节点。
若非终节点有“或”子节点,当且仅当所有子节点均不能解时,该非终节点才不能解。
若非终节点有“与”子节点时,当至少有一个子节点不能解时,该非终节点才能解。
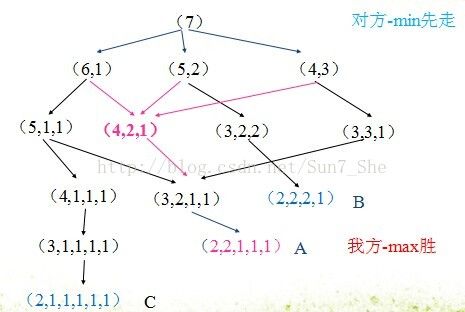
与或图(树)表示三解梵塔问题

其中(1,1,1)表示CBA三个环都套在第一个杆上,我们的目标是将CBA都移动到第三个杆上,即变为(3,3,3)
与或图的启发式搜索算法(AO*算法):
两个过程:1、图生成过程,即扩展节点 2、计算耗散值的过程
博弈树搜索:
博弈问题特点:
1、双人对弈,轮流走步
2、信息完备,双方所得到的信息是一样的
3、零和,即对一方有利的棋,对另一方肯定是不利的,不存在对双方均有利或无利的棋
博弈的特性:
1、两个棋手交替地走棋
2、比赛的最终结果,是赢、输和平局中的一种
3、可用图搜索技术进行,但效率很低
4、博弈的过程,是寻找置对手于必败态的过程
5、双方都无法干预对方的选择
例:
Grundy博弈
Grundy博弈是一个分钱币的游戏。有 一堆数目为N的钱币,由两位选手轮流进行分堆,要求每个选手每次只把其中某一堆分成数目不等的两小堆。例如,选手甲把N分成两堆后,轮到选手乙就可以挑其中一堆来分,如此进行下去,直到有一位选手无法把钱币再分成不相等的两堆时就得认输。
例2:
Grundy博弈是取石子的游戏。有 一堆数目为N(=15)的石子,由两位选手轮流进行选取,要求每个选手每次只能选取1、或2、或3个石子、拾取最后一个石子的为胜者。设计一种获胜策略。
答:1、先选取;
2、(15)-12-(9、10、11)-8-(5、6、7)-4-(3、2、1)
极小极大搜索过程
中国象棋:
对各个局面进行评估
评估的目的:对后面的状态提前进行考虑,并且以各种状态的评估值为基础作出最好的走棋选择。
评估的方法:用评价函数对棋局进行评估。赢的评估值设为+∞,输的评估值设为-∞,平局的评估值设为0。
评估的标准:由于下棋的双方是对立的,只能选择其中一方为评估的标准方。
由于正方和反方是交替走步的,因此MAX节点和MIN节点会交替出现。
正方(MAX节点)从所有子节点中,选取具有最大评估值的节点。
反方(MIN节点)从其所有子节点中,选取具有最小评估值的节点。
反复进行这种选取,就可以得到双方各个节点的评估值。这种确定棋步的方法,称为极小极大搜索法。
例:
设有一个摆放三个子的棋盘残局,如下图所示,〇和╳在结束前有三步棋可以走,而且设走第一步的是╳ 。这时存在着三个空格A,B,C,用博弈树搜索算法判断应该把棋子放到哪一格内。

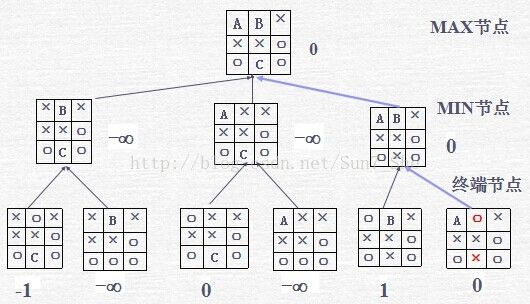
所以,对于棋盘残局中的╳来说,最好的选择,是将╳放在C的位置上,这时可以导致平局局面。
α-β搜索过程
出现原因:
在极小极大法中,必须求出所有终端节点的评估值,当预先考虑的棋步比较多时,计算量会大大增加。为了提高搜索的效率,引入了通过对评估值的上下限进行估计,从而减少需进行评估的节点范围的α-β剪支法。
MAX节点的评估下限值α:
作为正方出现的MAX节点,假设它的MIN子节点有N个,那么当它的第一个MIN子节点的评估值为α时,则对于其它的子节点,如果有高过的,就取那最高的值作为该MAX节点的评估值;如果没有,则该MAX节点的评估值为α。
MIN节点的评估上限值β:
作为反方出现的MIN节点,假设它的MAX子节点有N个,那么当它的第一个MAX子节点的评估值为β时,则对于其它子节点,如果有低于的,就取那个低于的值作为该MIN节点的评估值;如果没有,则该MIN节点的评估值取β
α剪支法:
设MAX节点的下限为α,则其所有的MIN子节点中,其评估值的β上限小于等于α的节点,其以下部分的搜索都可以停止了,即对这部分节点进行了α剪支。
β剪支法:
设MIN节点的上限为β,则其所有的MAX子节点中,其评估值的α下限大于等于β的节点,其以下部分的搜索都可以停止了,即对这部分节点进行了β剪支。
改进:
改进1:
使用-剪支技术,当不满足剪支条件(即)时或值比值大不了多少或极相近时,这时也可以进行剪支,以便有条件把搜索集中到会带来更大效果的其他路径上,这就是中止对效益不大的一些子树的搜索,以提高搜索效率。
改进2:
不严格限制搜索的深度。当到达深度限制时,如出现博弈格局有可能发生较大变化时,则应多搜索几层,使格局进入较稳定状态后再中止,这样可使倒推值计算的结果比较合理,避免考虑不充分产生的影响,这是等候状态平稳后中止搜索的方法。
改进3:
当算法给出所选的走步后,不要马上停止搜索,而是在原先估计可能的路径上再往前搜索几步,再次检验会不会出现意外,这是一种增添辅助搜索的方法。
改进4:
对某些博弈的开局阶段和残局阶段,往往总结了一些固定的对弈模式,因此可以利用这些知识编好走步表,以便在开局和结局时使用查表法。只是在进入中盘阶段后,再调用其他有效的搜索算法,来选择最优的走步。