Visual Studio 2022配置PCL1.12.1版本点云库
说明:这个配置步骤是当时自己参考2019配置的,当时网上还没有VS2022的配置步骤,我在自己电脑上是配置成功了,所以我将配置过程记录了下来,仅供参考!!!
1、软件下载
- Microsoft Visual Studio 2022 Pro: https://visualstudio.microsoft.com/zh-hans/downloads/
- PCL安装程序及pdb文件包:https://github.com/PointCloudLibrary/pcl/releases

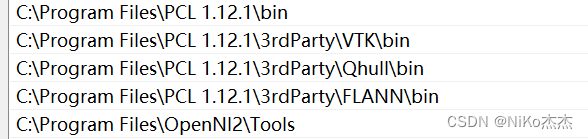
2、配置系统环境变量
- 系统属性->高级->环境变量->系统变量
C.\Program Files\PCL 1.12.1\bin
C:\Program Files\PCL 1.12.1\3rdParty\VTK\bin
C:\Program Files\PCL 1.12.1\3rdPartylQhull\bin
C:\Program Files\PCL 1.12.1\3rdParty\FLANNVbin
C\Program Files\OpenNI2\Tools
- OpenIN2也要加入系统变量
OPENNI2 INCLUDE64 C:\Program Files\OpenNl2\Include\
OPENNI2_LIB64 C:\Program Files\OpenNI2\Lib\
OPENNI2_REDIST64 C:\Program Files\OpenNl2\Redist\

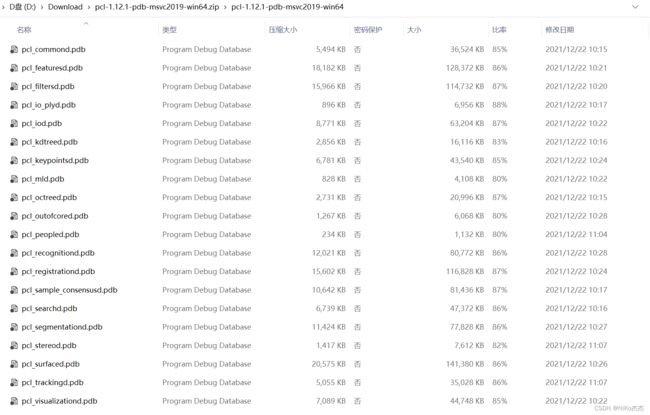
3、配置PDB文件
将下载得到的压缩包解压缩后将文件复制到PCL安装目录下bin文件夹:

4、配置PCL1.12.1
-
新建一个控制台应用,找到属性管理器,新建立一个项目属性表(目的:以后新建一个PCL项目文件直接调用配置好的属性表,一劳永逸)

-
打开属性表,配置VC++目录中的包含目录和库目录,

包含目录:
C:\Program Files\PCL 1.12.1\3rdParty\Boost\include\boost-1_78
C:\Program Files\PCL 1.12.1\3rdParty\Eigen\eigen3
C:\Program Files\OpenNI2\Include
C:\Program Files\PCL 1.12.1\3rdParty\FLANN\include
C:\Program Files\PCL 1.12.1\3rdParty\Qhull\include
C:\Program Files\PCL 1.12.1\3rdParty\VTK\include\vtk-9.1
C:\Program Files\PCL 1.12.1\include\pcl-1.12
库目录:
C:\Program Files\OpenNI2\Lib
C:\Program Files\PCL 1.12.1\3rdParty\VTK\lib
C:\Program Files\PCL 1.12.1\3rdParty\Qhull\lib
C:\Program Files\PCL 1.12.1\3rdParty\FLANN\lib
C:\Program Files\PCL 1.12.1\3rdParty\Boost\lib
C:\Program Files\PCL 1.12.1\lib
- C/C++->常规和预处理器配置:
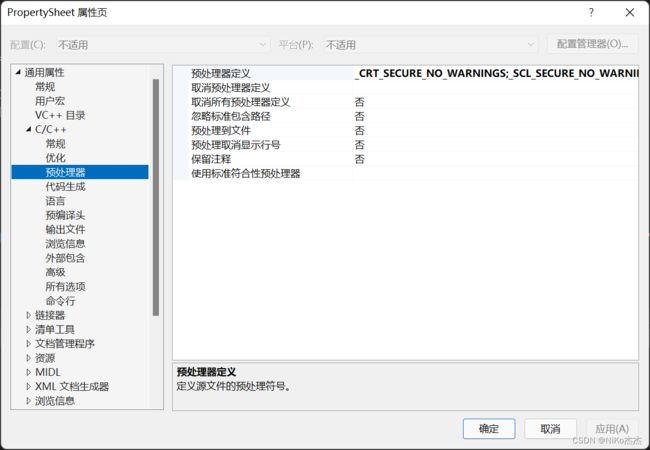
常规:
C:\Program Files\PCL 1.12.1\3rdParty\Boost\include\boost-1_78\boost
预处理器:
_CRT_SECURE_NO_WARNINGS
_SCL_SECURE_NO_WARNINGS
_SILENCE_FPOS_SEEKPOS_DEPRECATION_WARNING
- 链接器->输入->附加依赖项配置:在每个库目录中找到所需要的.lib文件,根据不同库目录下的.lib文件名,可以区分出debug模式和release模式各自的.lib文件,Debug版本含“gd”,可以区分出两个版本的库文件。
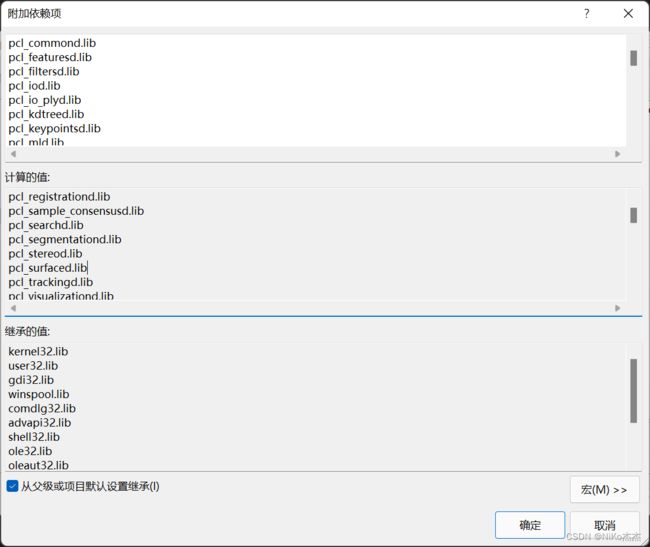
pcl_commond.lib
pcl_featuresd.lib
pcl_filtersd.lib
pcl_iod.lib
pcl_io_plyd.lib
pcl_kdtreed.lib
pcl_keypointsd.lib
pcl_mld.lib
pcl_octreed.lib
pcl_outofcored.lib
pcl_peopled.lib
pcl_recognitiond.lib
pcl_registrationd.lib
pcl_sample_consensusd.lib
pcl_searchd.lib
pcl_segmentationd.lib
pcl_stereod.lib
pcl_surfaced.lib
pcl_trackingd.lib
pcl_visualizationd.lib
libboost_atomic-vc142-mt-gd-x64-1_78.lib
libboost_bzip2-vc142-mt-gd-x64-1_78.lib
libboost_chrono-vc142-mt-gd-x64-1_78.lib
libboost_container-vc142-mt-gd-x64-1_78.lib
libboost_context-vc142-mt-gd-x64-1_78.lib
libboost_contract-vc142-mt-gd-x64-1_78.lib
libboost_coroutine-vc142-mt-gd-x64-1_78.lib
libboost_date_time-vc142-mt-gd-x64-1_78.lib
libboost_exception-vc142-mt-gd-x64-1_78.lib
libboost_filesystem-vc142-mt-gd-x64-1_78.lib
libboost_graph-vc142-mt-gd-x64-1_78.lib
libboost_graph_parallel-vc142-mt-gd-x64-1_78.lib
libboost_iostreams-vc142-mt-gd-x64-1_78.lib
libboost_json-vc142-mt-gd-x64-1_78.lib
libboost_locale-vc142-mt-gd-x64-1_78.lib
libboost_log-vc142-mt-gd-x64-1_78.lib
libboost_log_setup-vc142-mt-gd-x64-1_78.lib
libboost_math_c99-vc142-mt-gd-x64-1_78.lib
libboost_math_c99f-vc142-mt-gd-x64-1_78.lib
libboost_math_c99l-vc142-mt-gd-x64-1_78.lib
libboost_math_tr1-vc142-mt-gd-x64-1_78.lib
libboost_math_tr1f-vc142-mt-gd-x64-1_78.lib
libboost_math_tr1l-vc142-mt-gd-x64-1_78.lib
libboost_mpi-vc142-mt-gd-x64-1_78.lib
libboost_nowide-vc142-mt-gd-x64-1_78.lib
libboost_numpy38-vc142-mt-gd-x64-1_78.lib
libboost_prg_exec_monitor-vc142-mt-gd-x64-1_78.lib
libboost_program_options-vc142-mt-gd-x64-1_78.lib
libboost_python38-vc142-mt-gd-x64-1_78.lib
libboost_random-vc142-mt-gd-x64-1_78.lib
libboost_regex-vc142-mt-gd-x64-1_78.lib
libboost_serialization-vc142-mt-gd-x64-1_78.lib
libboost_system-vc142-mt-gd-x64-1_78.lib
libboost_test_exec_monitor-vc142-mt-gd-x64-1_78.lib
libboost_thread-vc142-mt-gd-x64-1_78.lib
libboost_timer-vc142-mt-gd-x64-1_78.lib
libboost_type_erasure-vc142-mt-gd-x64-1_78.lib
libboost_unit_test_framework-vc142-mt-gd-x64-1_78.lib
libboost_wave-vc142-mt-gd-x64-1_78.lib
libboost_wserialization-vc142-mt-gd-x64-1_78.lib
libboost_zlib-vc142-mt-gd-x64-1_78.lib
flann-gd.lib
flann_cpp-gd.lib
flann_cpp_s-gd.lib
flann_s-gd.lib
OpenNI2.lib
qhullcpp_d.lib
qhullstatic_d.lib
qhullstatic_rd.lib
qhull_rd.lib
vtkcgns-9.1d.lib
vtkChartsCore-9.1d.lib
vtkCommonColor-9.1d.lib
vtkCommonComputationalGeometry-9.1d.lib
vtkCommonCore-9.1d.lib
vtkCommonDataModel-9.1d.lib
vtkCommonExecutionModel-9.1d.lib
vtkCommonMath-9.1d.lib
vtkCommonMisc-9.1d.lib
vtkCommonSystem-9.1d.lib
vtkCommonTransforms-9.1d.lib
vtkDICOMParser-9.1d.lib
vtkDomainsChemistry-9.1d.lib
vtkDomainsChemistryOpenGL2-9.1d.lib
vtkdoubleconversion-9.1d.lib
vtkexodusII-9.1d.lib
vtkexpat-9.1d.lib
vtkFiltersAMR-9.1d.lib
vtkFiltersCore-9.1d.lib
vtkFiltersExtraction-9.1d.lib
vtkFiltersFlowPaths-9.1d.lib
vtkFiltersGeneral-9.1d.lib
vtkFiltersGeneric-9.1d.lib
vtkFiltersGeometry-9.1d.lib
vtkFiltersHybrid-9.1d.lib
vtkFiltersHyperTree-9.1d.lib
vtkFiltersImaging-9.1d.lib
vtkFiltersModeling-9.1d.lib
vtkFiltersParallel-9.1d.lib
vtkFiltersParallelImaging-9.1d.lib
vtkFiltersPoints-9.1d.lib
vtkFiltersProgrammable-9.1d.lib
vtkFiltersSelection-9.1d.lib
vtkFiltersSMP-9.1d.lib
vtkFiltersSources-9.1d.lib
vtkFiltersStatistics-9.1d.lib
vtkFiltersTexture-9.1d.lib
vtkFiltersTopology-9.1d.lib
vtkFiltersVerdict-9.1d.lib
vtkfmt-9.1d.lib
vtkfreetype-9.1d.lib
vtkGeovisCore-9.1d.lib
vtkgl2ps-9.1d.lib
vtkglew-9.1d.lib
vtkhdf5-9.1d.lib
vtkhdf5_hl-9.1d.lib
vtkImagingColor-9.1d.lib
vtkImagingCore-9.1d.lib
vtkImagingFourier-9.1d.lib
vtkImagingGeneral-9.1d.lib
vtkImagingHybrid-9.1d.lib
vtkImagingMath-9.1d.lib
vtkImagingMorphological-9.1d.lib
vtkImagingSources-9.1d.lib
vtkImagingStatistics-9.1d.lib
vtkImagingStencil-9.1d.lib
vtkInfovisCore-9.1d.lib
vtkInfovisLayout-9.1d.lib
vtkInteractionImage-9.1d.lib
vtkInteractionStyle-9.1d.lib
vtkInteractionWidgets-9.1d.lib
vtkIOAMR-9.1d.lib
vtkIOAsynchronous-9.1d.lib
vtkIOCGNSReader-9.1d.lib
vtkIOChemistry-9.1d.lib
vtkIOCityGML-9.1d.lib
vtkIOCONVERGECFD-9.1d.lib
vtkIOCore-9.1d.lib
vtkIOEnSight-9.1d.lib
vtkIOExodus-9.1d.lib
vtkIOExport-9.1d.lib
vtkIOExportGL2PS-9.1d.lib
vtkIOExportPDF-9.1d.lib
vtkIOGeometry-9.1d.lib
vtkIOHDF-9.1d.lib
vtkIOImage-9.1d.lib
vtkIOImport-9.1d.lib
vtkIOInfovis-9.1d.lib
vtkIOIOSS-9.1d.lib
vtkIOLegacy-9.1d.lib
vtkIOLSDyna-9.1d.lib
vtkIOMINC-9.1d.lib
vtkIOMotionFX-9.1d.lib
vtkIOMovie-9.1d.lib
vtkIONetCDF-9.1d.lib
vtkIOOggTheora-9.1d.lib
vtkIOParallel-9.1d.lib
vtkIOParallelXML-9.1d.lib
vtkIOPLY-9.1d.lib
vtkIOSegY-9.1d.lib
vtkIOSQL-9.1d.lib
vtkioss-9.1d.lib
vtkIOTecplotTable-9.1d.lib
vtkIOVeraOut-9.1d.lib
vtkIOVideo-9.1d.lib
vtkIOXML-9.1d.lib
vtkIOXMLParser-9.1d.lib
vtkjpeg-9.1d.lib
vtkjsoncpp-9.1d.lib
vtkkissfft-9.1d.lib
vtklibharu-9.1d.lib
vtklibproj-9.1d.lib
vtklibxml2-9.1d.lib
vtkloguru-9.1d.lib
vtklz4-9.1d.lib
vtklzma-9.1d.lib
vtkmetaio-9.1d.lib
vtknetcdf-9.1d.lib
vtkogg-9.1d.lib
vtkParallelCore-9.1d.lib
vtkParallelDIY-9.1d.lib
vtkpng-9.1d.lib
vtkpugixml-9.1d.lib
vtkRenderingAnnotation-9.1d.lib
vtkRenderingContext2D-9.1d.lib
vtkRenderingContextOpenGL2-9.1d.lib
vtkRenderingCore-9.1d.lib
vtkRenderingFreeType-9.1d.lib
vtkRenderingGL2PSOpenGL2-9.1d.lib
vtkRenderingImage-9.1d.lib
vtkRenderingLabel-9.1d.lib
vtkRenderingLOD-9.1d.lib
vtkRenderingOpenGL2-9.1d.lib
vtkRenderingSceneGraph-9.1d.lib
vtkRenderingUI-9.1d.lib
vtkRenderingVolume-9.1d.lib
vtkRenderingVolumeOpenGL2-9.1d.lib
vtkRenderingVtkJS-9.1d.lib
vtksqlite-9.1d.lib
vtksys-9.1d.lib
vtkTestingRendering-9.1d.lib
vtktheora-9.1d.lib
vtktiff-9.1d.lib
vtkverdict-9.1d.lib
vtkViewsContext2D-9.1d.lib
vtkViewsCore-9.1d.lib
vtkViewsInfovis-9.1d.lib
vtkWrappingTools-9.1d.lib
vtkzlib-9.1d.lib
liblas.lib
5、测试
- 数据: https://www.aliyundrive.com/s/3TRibmFSTtQ
#include::Ptr cloud(new PointCloud); //简化后的代码
pcl::PCDReader pcdread;
if (pcdread.read(path, *cloud) < 0)
{
PCL_ERROR("\a->点云文件不存在!\n");
system("pause");
return 1;
}
cout << "->加载了" << cloud->points.size() << "个数据点" << endl;
//-------------------------Visualizer 可视化------------------------------
pcl::visualization::PCLVisualizer::Ptr viewer(new pcl::visualization::PCLVisualizer("3D Point Cloud Viewer")); //创建视图对象,定义标题栏名称“3D Viewer”
viewer->addPointCloud<pcl::PointXYZRGB>(cloud, "samp12_cloud"); //将点云添加到视图对象中,并定义一个唯一的ID
pcl::visualization::PointCloudColorHandlerGenericField<pcl::PointXYZRGB> fildcolor(cloud, "z");//按照z字段进行渲染
/****************注意此处ID不能与视图对象的ID值相同,否则会报错****************************/
viewer->addPointCloud<pcl::PointXYZRGB>(cloud, fildcolor, "samp12cloud");
/*下面的ID值应该与上面两个ID其中一个相同,即与dataset or fildcolor的ID相同,不能重新定义ID
否则会报错"Could not find any PointCloud datasets with id !"*/
viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 4.5, "samp12cloud");//设置点云大小
viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_COLOR, 1, 0.5, 0.9, "samp12_cloud");//设置点云显示颜色,rgb颜色范围在0~1之间
viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_OPACITY, 0.8, "samp12cloud");//设置点云透明度
viewer->setBackgroundColor(0, 0, 0);//窗口背景色,黑色
viewer->addText("samp12", 20, 20, "text_1");//在指定位置添加文字
//必选
while (!viewer->wasStopped())
{
viewer->spinOnce(100);
//boost::this_thread::sleep(boost::posix_time::microseconds(100000));
}
}
int main()
{
//pclMyFilter("./data/samp12.pcd");
pclMyShow("./data/samp12.pcd");
return 0;
}
