《视觉 SLAM 十四讲》V2 第 5 讲 相机与图像
文章目录
-
-
- 相机 内参 && 外参
- 5.1.2 畸变模型
- 单目相机的成像过程
- 5.1.3 双目相机模型
- 5.1.4 RGB-D 相机模型
- 实践
-
- 5.3.1 OpenCV 基础操作 【Code】
-
- OpenCV版本查看
- 5.3.2 图像去畸变 【Code】
- 5.4.1 双目视觉 视差图 点云 【Code】
- 5.4.2 RGB-D 点云 拼合成 地图【Code】
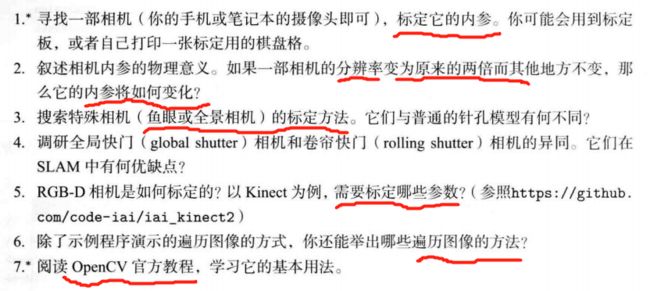
- 习题
-
- 题1
- √ 题2
- 题3
- √ 题4
- 题5
- 题6
- 题7
-
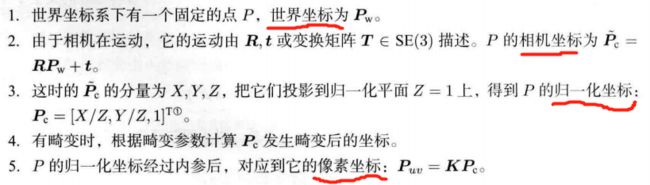
空间点 投影到 相机成像平面
前面内容总结:
1、机器人如何表示自身位姿
视觉SLAM: 观测主要是指 相机成像 的过程。
投影过程描述: 针孔 + 畸变
相机 内参 && 外参
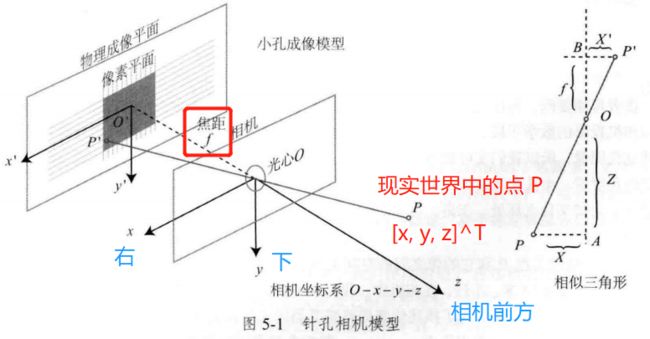

像素坐标系 与 成像平面之间,相差了一个缩放 和一个原点的平移。
像素坐标系:
原点 o ′ o^{\prime} o′ 位于 图像 左上角
u u u 轴 向右 与 x x x 轴 平行
v v v 轴 向下 与 y y y 轴 平行
设像素坐标在 u u u 轴 上缩放了 α \alpha α 倍 , 在 v v v 轴 上缩放了 β \beta β 倍。同时原点 平移了 [ c x , c y ] T [c_x, c_y]^T [cx,cy]T
则 点 p ′ p^{\prime} p′ 的坐标 与像素坐标 [ u , v ] T [u, v]^T [u,v]T 之间的关系
{ u = α X ′ + c x = 由式 5.2 α ⋅ f X Z + c x = 令 f x = α f f x X Z + c x v = β Y ′ + c y = 由式 5.2 β ⋅ f Y Z + c x = 令 f y = β f f y Y Z + c y \begin{equation*} \begin{cases} u = \alpha X^{\prime} + c_x \overset{由式5.2}{=} \alpha ·f\frac{X}{Z} + c_x \overset{令f_x = \alpha f}{=} f_x\frac{X}{Z} + c_x \\ v = \beta Y^{\prime} + c_y \overset{由式5.2}{=} \beta·f\frac{Y}{Z} + c_x \overset{令f_y = \beta f}{=} f_y\frac{Y}{Z} + c_y \end{cases} \end{equation*} {u=αX′+cx=由式5.2α⋅fZX+cx=令fx=αffxZX+cxv=βY′+cy=由式5.2β⋅fZY+cx=令fy=βffyZY+cy
其中 f x = α f , f y = β f f_x = \alpha f, f_y=\beta f fx=αf,fy=βf
f f f 的单位 为 米,
α , β \alpha, \beta α,β 的单位为 像素/米
f x , f y f_x, f_y fx,fy 和 c x , c y c_x, c_y cx,cy 的单位为 像素。
[ u v 1 ] = [ f x 0 c x 0 f y c y 0 0 1 ] [ X Z Y Z 1 ] = 1 Z [ f x 0 c x 0 f y c y 0 0 1 ] [ X Y Z ] = d e f 1 Z K P \begin{align*}\begin{bmatrix}u\\ v\\ 1\end{bmatrix} &=\begin{bmatrix}f_x & 0 & c_x\\ 0 & f_y & c_y\\ 0 & 0 &1\end{bmatrix}\begin{bmatrix}\frac{X}{Z}\\ \frac{Y}{Z}\\ 1\end{bmatrix}\\ &=\frac{1}{Z}\begin{bmatrix}f_x & 0 & c_x\\ 0 & f_y & c_y\\ 0 & 0 &1\end{bmatrix}\begin{bmatrix}X\\ Y\\ Z\end{bmatrix}\\ &\overset{\mathrm{def}}{=} \frac{1}{Z}\bm{KP} \end{align*} uv1 = fx000fy0cxcy1 ZXZY1 =Z1 fx000fy0cxcy1 XYZ =defZ1KP
相机的内参数(Camera Intrinsics) 矩阵 K \bm{K} K
K = [ f x 0 c x 0 f y c y 0 0 1 ] \bm{K} = \begin{bmatrix}f_x & 0 & c_x\\ 0 & f_y & c_y\\ 0 & 0 &1\end{bmatrix} K= fx000fy0cxcy1
标定:自己确定相机的内参【相机生产厂商未告知相机内参的情形】
- 标定算法: 单目棋盘格张正友标定法
相机在运动 ——> P P P 的相机坐标 = 其世界坐标 P w \bm{P_\mathrm{w}} Pw 根据相机位姿转换到 相机坐标系下。
Z P u v = Z [ u v 1 ] = K ( R P w + t ) = K T P w Z\bm{P}_{uv}=Z\begin{bmatrix} u \\v \\1\end{bmatrix}=\bm{K(RP_{\mathrm{w}}+t)=KTP_\mathrm{w}} ZPuv=Z uv1 =K(RPw+t)=KTPw
相机的外参数(Camera Extrinsics):相机的位姿 R \bm{R} R , t \bm{t} t
机器人 或 自动驾驶: 外参 = 相机坐标系 到机器人本体坐标系 之间的 变换。
- 描述 相机安装在什么地方
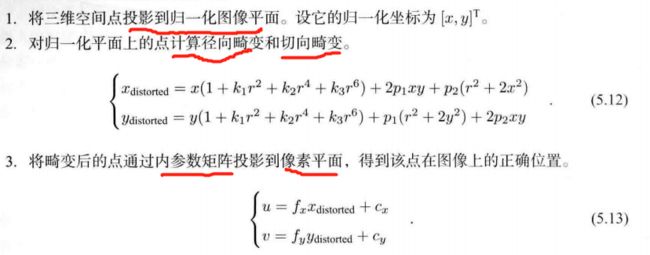
5.1.2 畸变模型
径向畸变:透镜形状引起的畸变(失真)。坐标点 距离原点的长度发生了变化。

桶形畸变:图像放大率 随着 与光轴之间的距离 增加 而减小。
枕型畸变:图像放大率 随着 与光轴之间的距离 增加 而增加。
- 穿过图像中心和光轴有交点的直线还能保持形状不变。
切向畸变:相机在在组装过程中不能使 透镜和成像面 严格平行。水平夹角发行了变化。

通过5个畸变系数( k 1 , k 2 , k 3 , p 1 , p 2 k_1,k_2,k_3,p_1,p_2 k1,k2,k3,p1,p2)找到某个点在像素平面的正确位置:
单目相机的成像过程
5.1.3 双目相机模型

z − f z = b − u L + u R b \frac{z-f}{z}=\frac{b-u_L+u_R}{b} zz−f=bb−uL+uR
令 d = u L − u R 令d = u_L-u_R 令d=uL−uR 视差
则 z − f z = b − d b \frac{z-f}{z}=\frac{b-d}{b} zz−f=bb−d
1 − f z = 1 − d b 1-\frac{f}{z}=1-\frac{d}{b} 1−zf=1−bd
f z = d b \frac{f}{z}=\frac{d}{b} zf=bd
z = f b d z=\frac{fb}{d} z=dfb
由于计算量的原因,双目深度估计需要使用 GPU 或 FPGA 来实时计算。
5.1.4 RGB-D 相机模型


RGB-D 相机: 向探测目标 发射一束 光线(通常是红外光)。
RGB-D 不足:
1、用红外光进行深度测量,容易受到 日光或其他传感器发射的红外光干扰。不能在室外使用。
2、多个RGB-D相机之间也会相互干扰。
3、透射材质因为接收不到反射光,无法测量。

h h h 对应 行数
w w w 对应 列数

OpenCV: 通道顺序为 BGR

Eigen对于固定大小的矩阵使用起来效率更高。
实践
5.3.1 OpenCV 基础操作 【Code】
OpenCV版本查看
python3 -c "import cv2; print(cv2.__version__)"
可能报错
/home/xixi/Downloads/slambook2-master/ch5/basicuse/basicuse.cpp:6:9: fatal error: opencv2/core/core.cpp: No such file or directory
6 | #include<opencv2/core/core.cpp>
OpenCV没安装好
gtk/gtk.h报错链接
到 OpenCV 安装包
mkdir build && cd build
cmake ..
make -j4 # 之前 -j8有误,改4试试
sudo make install
——————————————————
mkdir build && cd build
cmake ..
make
./basicuse ubuntu.png ## ubuntu.png 要放在 build文件夹里; 或者提供该图片的绝对路径;或相对于build文件夹的相对路径
CMakeLists.txt
cmake_minimum_required(VERSION 2.8)
project(basicuse)
# 添加C++ 11 标准支持 nullptr chrono
set( CMAKE_BUILD_TYPE "Release" )
set( CMAKE_CXX_FLAGS "-std=c++11 -O3" )
# 寻找 OpenCV 库
find_package(OpenCV 4.2.0 REQUIRED)
#添加头文件
include_directories(${OpenCV_INCLUDE_DIRS})
add_executable(basicuse basicuse.cpp)
# 链接OpenCV库
target_link_libraries(basicuse ${OpenCV_LIBS})
basicuse.cpp
#include![]()

#include![]()
#include5.3.2 图像去畸变 【Code】
cv::Undistort()
CMakeLists.txt
cmake_minimum_required(VERSION 2.8)
project(myOpenCV)
# 添加C++ 11 标准支持 nullptr chrono
set( CMAKE_BUILD_TYPE "Release" )
set( CMAKE_CXX_FLAGS "-std=c++11 -O3" )
# 寻找 OpenCV 库
find_package(OpenCV 4.2.0 REQUIRED)
#添加头文件
include_directories(${OpenCV_INCLUDE_DIRS})
add_executable(myOpenCV undistortImage.cpp)
# 链接OpenCV库
target_link_libraries(myOpenCV ${OpenCV_LIBS})
undistortImage.cpp
#include 
5.4.1 双目视觉 视差图 点云 【Code】

![]()
CMakeLists.txt
cmake_minimum_required(VERSION 2.8)
project(stereoVision)
# 添加C++ 11 标准支持 nullptr chrono
set( CMAKE_BUILD_TYPE "Release" )
set( CMAKE_CXX_FLAGS "-std=c++11 -O3" )
# 寻找 OpenCV 库
find_package(OpenCV 4.2.0 REQUIRED)
#添加头文件
include_directories(${OpenCV_INCLUDE_DIRS})
find_package(Pangolin REQUIRED)
add_executable(stereoVision stereoVision.cpp)
target_link_libraries(stereoVision ${OpenCV_LIBS} ${Pangolin_LIBRARIES})
stereoVision.cpp
#include 视差图:

byzanz-record -x 147 -y 76 -w 1386 -h 768 -d 15 --delay=5 -c /home/xixi/myGIF/test.gif
![]()
5.4.2 RGB-D 点云 拼合成 地图【Code】
通过物理方法 获得 像素深度信息

![]()
mkdir build && cd build
cmake ..
make
./joinMap
CMakeLists.txt
cmake_minimum_required(VERSION 2.8)
project(joinMap)
# 添加C++ 11 标准支持 nullptr chrono
set( CMAKE_BUILD_TYPE "Release" )
set( CMAKE_CXX_FLAGS "-std=c++11 -O3" )
# 寻找 OpenCV 库
find_package(OpenCV 4.2.0 REQUIRED)
#添加头文件
include_directories(${OpenCV_INCLUDE_DIRS})
# Sophus 库
find_package(Sophus REQUIRED)
include_directories(${Sophus_INCLUDE_DIRS})
# Pangolin 库
find_package(Pangolin REQUIRED)
include_directories(${Pangolin_INCLUDE_DIRS})
add_executable(joinMap joinMap.cpp)
target_link_libraries(joinMap ${OpenCV_LIBS} ${Pangolin_LIBRARIES} ${Sophus_LIBRARIES})
# 上面这句 一定要 链接到 Sophus
joinMap.cpp
#include 

byzanz-record -x 72 -y 64 -w 998 -h 605 -d 15 --delay=5 -c /home/xixi/myGIF/test.gif
习题
待做:
- 找OpenCV里的标定 方法
- 整理链接里的内容
题1
相机内参标定
√ 题2
相机内参 K \bm{K} K 的物理意义:可将世界坐标系某点 P P P 的归一化坐标 转成 像素坐标。 P u v = K [ X / Z , Y / Z , 1 ] T \bm{P_{uv}=K}[X/Z,Y/Z, 1]^T Puv=K[X/Z,Y/Z,1]T
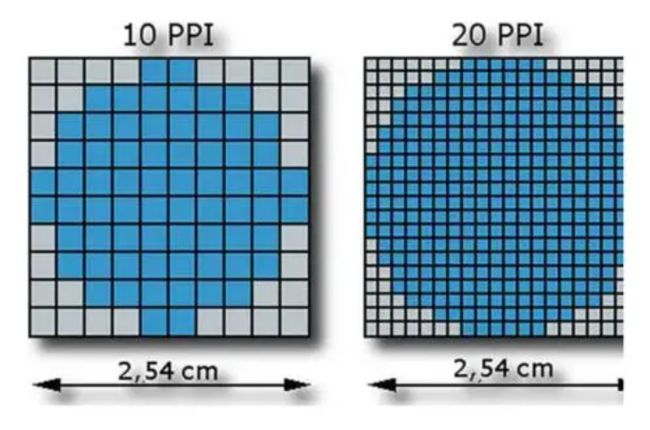
图像分辨率指图像中存储的信息量,是每英寸图像内有多少个像素点,分辨率的单位为PPI(Pixels Per Inch),通常叫做像素每英寸。

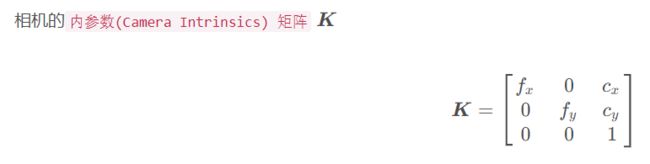
当分辨率变为原来的两倍时, 显然对于同一位置,以像素为单位的 c x c_x cx 和 c y c_y cy 均变为原来的2倍。而以 像素/每米 为单位的 α \alpha α 和 β \beta β 变成原来的 2 倍。 f f f 不变,则 f x = α f f_x = \alpha f fx=αf 和 f y = β f f_y = \beta f fy=βf 也变为原来的 2 倍。
综上:当相机的分辨率变为原来的2倍时, c x c_x cx , c y c_y cy , f x f_x fx , f y f_y fy 均变为原来的 2 倍。
题3
鱼眼或全景相机 标定
链接1
链接2
————————————
√ 题4
异同:
工业相机常见的曝光方式:
1、全局曝光(Global shutter,也称全局快门、帧曝光)
- 当光圈打开时,工业相机中的图像传感器上所有像素点可以在同一时刻曝光,当光圈关闭后,所有像素同时结束曝光,然后输出像素数据。全局曝光的工业相机可以一次拍摄物体的整体图像后再输出,因此在拍摄高速运动物体时图像不会偏移,能够达到无失真的效果。
CCD(电荷耦合)元件 为这种曝光 方式
2、卷帘曝光(Rolling shutter,也称卷帘快门、行曝光)
- 采用的是逐行扫描逐行曝光的方式,当上一行的所有像素同时曝光后,下一行的所有像素再同时曝光,直至所有行曝光完成。
- 当曝光不当或物体移动较快时,会出现部分曝光(partial exposure)、斜坡图形(skew)、晃动(wobble) 等现象。这种Rolling shutter方式拍摄出现的现象,称为“果冻效应”。
- 大部分
CMOS相机使用卷帘快门(rolling shutter)
3、基于卷帘曝光并结合全局曝光优势的全局复位释放曝光(Global Reset Release Shutter,GRR)
优缺点:
Global shutter适用于拍摄高速运动物体;且在光线有明暗变化的时候,Global shutter sensor不会有明暗瑕疵。
Global shutter需要对每个像素都要增加一个存储单元,这样增加了sensor的生产难度以及成本。
Rolling Shuttersensor适用于拍摄运动速度相对较慢的物体或场景,可获得更高的成像信噪比。 Rolling Shutter 在低噪、像素损失、高感、动态范围等有优势。
————————
题5
RGB-D 相机标定

链接
链接2
题6
遍历图像的方法
链接
链接2
题7
OpenCV官方教程学习
官方文档