【GCC】undefined symbol问题的查找、定位与解决方法
原文链接:https://blog.csdn.net/buknow/article/details/96130049
今天被客户测出来一个问题:程序执行中报错,报错内容如下
XXXX:symbol lookup error:/home/....../libpdfium.so:undefined symbol:CRYPT_MD5Generate
报错分析:
这个问题表明是符号未定义的问题,而且直接定位于产品链接的第三方动态库libpdfium.so中,于是从libpdfium.so中着手。
因为有这个第三方库的源码,给错误的查找提供了可能。
错误定位:
但是这个符号未定义的错误很头疼,因为在我原来的想法中,符号位定义不应该是直接是在编译的时候就应该报错的吗? 所以为了确认,我重新编译了一遍第三方源码,编译时没有报错,生成了新的so,替换进去重新运行,结果也还是会包符号未定义的错误。在网上查找,知道了在链接时链接有误也会造成后期的符号未定义的错误(参考内容见最后)。这块可以通过ldd -r命令查看生成的so是否存在符号未定义的内容。
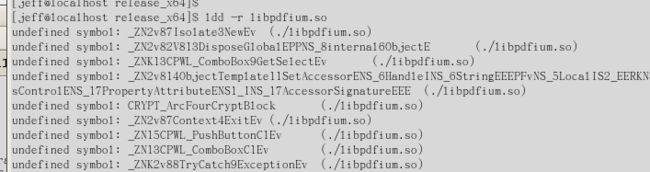
看这些未定义的符号,缺的实在太多了,按理说不应该的。在我的情况里,生成libpdfium.so动态库时会链接好几个静态库文件。根据网上查到的资料,确认一下链接的静态库顺序是否正确。直接在第三方源码中全局搜索报错的字符串“CRYPT_MD5Generate”,发现有两处cpp文件中存在,一处是声明定义的,另一处是调用的。
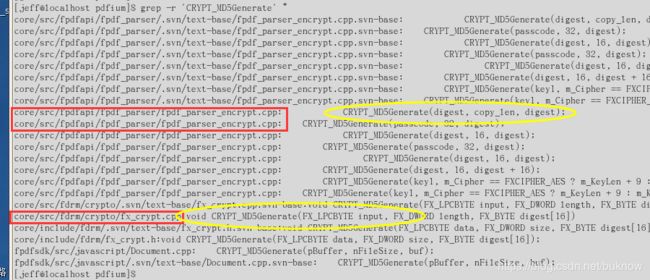
而这块可以看到fpdf_parse_encrypt是依赖于下边的fx_crypt文件的,再看静态库,fpdf_parse_encrypt被编译成fpdfapi.a,而fx_crypt被编译进pdrm.a静态库,所以应该是fpdfapi.a要依赖于pdrm.a静态库的。再检查Makefile中链接顺序,发现顺序是反的!!!罪魁祸首找到了!就是Makefile中链接的顺序错误导致最终so中符号未定义!
下面附上我这次查找过程中用到的几个很有用的命令,和参考的资料。
编译生成动态链接库后,调用时出现:
# lichunhong @ lichunhong-ThinkPad-T470p in ~/Documents/src/effective_robotics_programming_with_ros-master/catkin_ws on git:lichunhong/dev x [18:54:05] C:127
$ rosrun path_plan PathPlanSimulation
/home/lichunhong/Documents/src/effective_robotics_programming_with_ros-master/catkin_ws/devel/lib/path_plan/PathPlanSimulation:
symbol lookup error: /home/lichunhong/Documents/src/effective_robotics_programming_with_ros-master/catkin_ws/src/pathPlan/lib/libpathplan.so:
undefined symbol: _ZN12ninebot_algo10AprAlgoLog9instance_E
即 symbol lookup error: libpathplan.so: undefined symbol: _ZN12ninebot_algo10AprAlgoLog9instance_E
出现这种问题时,往往是链接时出现了问题,下面分3步解决
(1)使用file 命令查看 so库的架构,看看是否与平台一致
可以看到,当前so库架构为x86-64,可以在GNU/Linux平台下使用。平台与架构一致
# lichunhong @ lichunhong-ThinkPad-T470p in ~/Documents/src/motion_planner/bin on git:dev x [18:47:54]
$ file libpathplan.so
libpathplan.so: ELF 64-bit LSB shared object, x86-64, version 1 (GNU/Linux), dynamically linked,
BuildID[sha1]=32ae641e73c547376df20ca94746fbf5507de415, not stripped
接下来,需要定位一下 undefined symbol的具体信息
(2)通过 ldd -r xxx.so 命令查看so库链接状态和错误信息
ldd命令,可以查看对应的可执行文件或库文件依赖哪些库,但可执行文件或库文件要求与操作系统的编译器类型相同,即电脑是X86的GCC编译器,那么无法通过ldd命令查看ARM交叉编译器编译出来的可执行文件或库文件。
如果想在Ubuntu等Linux宿主机上查看ARM交叉编译好的可执行程序和库文件的相关依赖关系,可以通过以下命令:
readelf -d xxx.so | grep NEEDED
# lichunhong @ lichunhong-ThinkPad-T470p in ~/Documents/src/effective_robotics_programming_with_ros-master/catkin_ws/src/pathPlan/lib on git:lichunhong/dev x [18:57:19]
$ ldd -r libpathplan.so
linux-vdso.so.1 => (0x00007ffec1bd8000)
libstdc++.so.6 => /usr/lib/x86_64-linux-gnu/libstdc++.so.6 (0x00007f186cc0a000)
libm.so.6 => /lib/x86_64-linux-gnu/libm.so.6 (0x00007f186c901000)
libgcc_s.so.1 => /lib/x86_64-linux-gnu/libgcc_s.so.1 (0x00007f186c6eb000)
libc.so.6 => /lib/x86_64-linux-gnu/libc.so.6 (0x00007f186c321000)
/lib64/ld-linux-x86-64.so.2 (0x00007f186d27a000)
undefined symbol: pthread_create (./libpathplan.so)
undefined symbol: _ZN12ninebot_algo10AprAlgoLog9instance_E (./libpathplan.so)
undefined symbol: _ZN2cv3maxERKNS_3MatES2_ (./libpathplan.so)
undefined symbol: _ZN12ninebot_algo10AprAlgoLog8WriteLogE10LEVEL_TYPEPKcS3_z (./libpathplan.so)
undefined symbol: _ZN2cv6dilateERKNS_11_InputArrayERKNS_12_OutputArrayES2_NS_6Point_IiEEiiRKNS_7Scalar_IdEE (./libpathplan.so)
undefined symbol: _ZN2cvgtERKNS_3MatEd (./libpathplan.so)
undefined symbol: _ZN2cv8fastFreeEPv (./libpathplan.so)
undefined symbol: _ZN2cv3Mat5setToERKNS_11_InputArrayES3_ (./libpathplan.so)
undefined symbol: _ZN12ninebot_algo10AprAlgoLog9instance_E (./libpathplan.so)
可以看到有好多 undefined symbol ,其中就有提到的 _ZN12ninebot_algo10AprAlgoLog9instance_E 错误
(3) 使用 c++filt symbol 定位错误在那个C++文件中
从上面的undefined symbol中,通过c++filt
# lichunhong @ lichunhong-ThinkPad-T470p in ~/Documents/src/effective_robotics_programming_with_ros-master/catkin_ws/src/pathPlan/lib on git:lichunhong/dev x [19:04:26] C:1
$ c++filt _ZN2cv7waitKeyEi
cv::waitKey(int)
# lichunhong @ lichunhong-ThinkPad-T470p in ~/Documents/src/effective_robotics_programming_with_ros-master/catkin_ws/src/pathPlan/lib on git:lichunhong/dev x [19:04:31]
$ c++filt _ZN2cv3maxERKNS_3MatES2_
cv::max(cv::Mat const&, cv::Mat const&)
原文链接:https://blog.csdn.net/buknow/article/details/96130049