Linux网络编程5-epoll模型
Linux网络编程5-epoll模型
-
- 1.epoll相关函数
- 2.epoll服务器流程
- 3.epoll服务器代码实现
- 4.LT模式与ET模式
- 5.ET模式一次性读完数据的实现
- 6.epoll反应堆思想
- 7.epoll反应堆代码实现
- 8.epoll反应堆代码分析
1.epoll相关函数
#include #include #include 2.epoll服务器流程
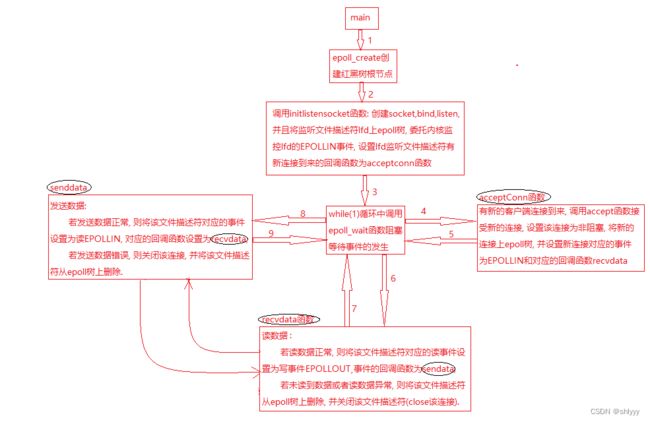
//使用epoll模型开发服务器流程:
int main()
{
//1 创建socket, 得到监听文件描述符lfd----socket()
//2 设置端口复用----setsockopt()
//3 绑定----bind()
//4 监听----listen()
//5
//创建一棵epoll树
int epfd = epoll_create();
//将监听文件描述符上树
struct epoll_event ev;
ev.evetns = EPOLLIN; //可读事件
ev.data.fd = lfd;
epoll_ctl(epfd, EPOLL_CTL_ADD, lfd, &ev);
struct epoll_event events[1024];
while(1)
{
nready = epoll_wait(epfd, events, 1024, -1);
if(nready<0)
{
if(errno==EINTR)//被信号中断
{
continue;
}
break;
}
for(i=0; i<nready; i++)
{
sockfd = events[i].data.fd;
//有客户端连接请求到来
if(sockfd==lfd)
{
cfd = accept(lfd, NULL, NULL);
//将cfd对应的读事件上epoll树
ev.data.fd = cfd;
ev.evetns = EPOLLIN;
epoll_ctl(epfd, EPOLL_CTL_ADD, cfd, &ev);
continue;
}
//有客户端发送数据过来
n = Read(sockfd, buf, sizeof(buf));
if(n<=0)
{
close(sockfd);
//将sockfd对应的事件节点从epoll树上删除
epoll_ctl(epfd, EPOLL_CTL_DEL, sockfd, NULL);
perror("read error or client closed");
continue;
}
else
{
write(sockfd, buf, n);
}
}
}
Close(epfd);
close(lfd);
return 0;
}
3.epoll服务器代码实现
//EPOLL模型测试
#include "wrap.h"
#include 4.LT模式与ET模式
epoll的两种模式ET和LT模式:分别表示边缘触发和水平触发。
LT水平触发: 高电平代表1:只要缓冲区中有数据, 就一直通知
ET边缘触发: 电平有变化就代表1:缓冲区中有数据只会通知一次, 之后再有数据才会通知.(若是读数据的时候没有读完, 则剩余的数据不会再通知, 直到有新的数据到来)
epoll默认情况下是LT模式,在这种模式下,若读数据一次性没有读完,缓冲区中还有可读数据,则epoll_wait还会再次通知
若将epoll设置为ET模式,若读数据的时候一次性没有读完,则epoll_wait不再通知,直到下次有新的数据发来.
边缘非阻塞模式: 提高效率
用实验验证ET:可以在上面epoll代码读客户端发送的数据时,read读取2字节,假如客户端发送了8字节数据,则会只读两个字节以后返回,第二次循环到epoll_wait时,虽然还有数据,但内核没有通知,因此数据没有完全读完。
此外设置ET模式,需要在accept之后设置与客户端通信的event的属性:EPOLLET
cfd = Accept(lfd, NULL, NULL);
//将新的cfd上epoll树
ev.data.fd = cfd;
ev.events = EPOLLIN | EPOLLET; // 设置EPOLLET表示ET模式
epoll_ctl(epfd, EPOLL_CTL_ADD, cfd, &ev);
5.ET模式一次性读完数据的实现
Q1:在ET模式下, 如何在epoll_wait返回一次的情况下读完数据?
循环读数据, 直到读完数据, 但是读完数据之后会阻塞.
//有客户端发送数据过来 循环读数据
memset(buf, 0x00, sizeof(buf));
while(1)
{
n = Read(sockfd, buf, 2);
printf("n==[%d]\n", n);
//读完数据的情况
if(n==-1)
{
printf("read over, n==[%d]\n", n);
break;
}
//对方关闭连接或者读异常
if(n==0 || (n<0&&n!=-1))
{
printf("n==[%d], buf==[%s]\n", n, buf);
close(sockfd);
//将sockfd对应的事件就节点从epoll树上删除
epoll_ctl(epfd, EPOLL_CTL_DEL, sockfd, NULL);
break;
}
else //正常读到数据的情况
{
printf("n==[%d], buf==[%s]\n", n, buf);
for(k=0; k<n; k++)
{
buf[k] = toupper(buf[k]);
}
Write(sockfd, buf, n);
}
}
ET模式由于只通知一次, 所以在读的时候要循环读, 直到读完, 但是当读完之后read就会阻塞, 所以应该将该文件描述符设置为非阻塞模式(fcntl函数).
read函数在非阻塞模式下读的时候, 若返回-1, 且errno为EAGAIN, 则表示当前资源不可用, 也就是说缓冲区无数据(缓冲区的数据已经读完了); 或者当read返回的读到的数据长度小于请求的数据长度时,就可以确定此时缓冲区中已没有数据可读了,也就可以认为此时读事件已处理完成。
Q2:若能够一次性读完还需要设置什么?
将通信文件描述符设置为非阻塞模式
//将cfd设置为非阻塞
int flag = fcntl(cfd, F_GETFL);
flag |= O_NONBLOCK;
fcntl(cfd, F_SETFL, flag);
ET模式一次读完所有数据完整代码:
//EPOLL模型测试:测试ET和LT模式的区别
#include "wrap.h"
#include 6.epoll反应堆思想
反应堆:一个小事件触发一系列反应。
epoll反应堆的思想:c++的封装思想(把数据和操作封装到一起)
1.将描述符,事件,对应的处理方法封装在一起。
2.当描述符对应的事件发生了, 自动调用处理方法(其实原理就是回调函数)
typedef union epoll_data {
void *ptr; // 使用ptr成员 指向自定义的结构
int fd;
uint32_t u32;
uint64_t u64;
} epoll_data_t;
struct epoll_event {
uint32_t events; /* Epoll events */
epoll_data_t data; /* User data variable */
};
// ptr指向自定义结构,该结构保存套接字描述符fd、监听事件类型例如EPOLLIN事件、回调函数指针用于处理该事件
/* 描述就绪文件描述符相关信息 */
struct myevent_s {
int fd; //要监听的文件描述符
int events; //对应的监听事件
void *arg; //泛型参数
void (*call_back)(int fd, int events, void *arg); //回调函数
char buf[BUFLEN];
int len;
};
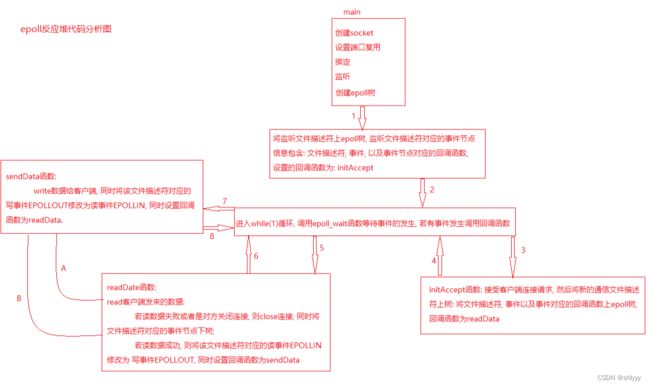
epoll反应堆的核心思想是:
在调用epoll_ctl函数的时候,在events上树的时候,利用epoll_data_t的ptr成员,将一个文件描述符、事件和回调函数封装成一个结构体,然后让ptr指向这个结构体,然后在epoll_wait函数返回的时候,返回有变化的事件节点,可以得到具体的events,然后获得events结构体中的events.data.ptr指针,ptr指针指向的结构体中有回调函数,最终可以调用这个回调函数,回调函数是用户自己编写的。
总之,ptr实际指向的是一个结构体,这个结构体中至少包含文件描述符、事件和回调函数。
7.epoll反应堆代码实现
// epoll基于非阻塞I/O事件驱动
#include 8.epoll反应堆代码分析
2.