stm32f4xx-外部中断
文章目录
- 一、 中断的基本概念
-
- 1.事件的“偶然”性和“必然”性
- 2、中断源(又称之为中断控制器)
- 3、中断类型
- 4、中断优先级
- 二、 STM32的外部中断
-
- 1、中断引脚
- 三、代码思路
-
- 1、8051单片机
- 注:
- 2、STM32
- 注意:
- 四、库函数接口
-
- 1、为引脚选择使用那个中断
- 2、配置外部中断
- 3、中断优先级的配置
- 4、获取外部中断状态
- 5、清空外部中断标志位
- 五、中断优先级
-
- 1、概述
- 2、抢占优先级和响应优先级的区别
-
- 1)高抢占优先级是可以打断正在执行的低抢占优先级的中断,若抢占优先级相同,则不会出现抢占的过程
- 2)抢占优先级相同,高响应优先级不可以打断低响应优先级的中断
- 3)抢占优先级相同的中断,当两个中断同时发生的情况下,那个响应优先级高,那个先执行
- 4)抢占优先级和响应优先级都相同的中断,假如同时发生,会按照硬件内部的优先级执行
- 5)无论抢占优先级,还是响应优先级,还是硬件内部的优先级,优先级数值越小,就代表优先级越高
- 3、中断优先级设置步骤
- 六、test
-
- test
一、 中断的基本概念
中断的定义及中断工作方式
由于内部或外部“偶然”事件的发生,导致CPU暂停当前的进程,转入预先安排好的事件服务程序(中断服务程序)中去,执行其代码并为其服务(事件处理),待服务完成后,CPU再回到被打断的进程中继续工作的过程。
1.事件的“偶然”性和“必然”性
例如:计算机键盘,鼠标的设置就为计算机系统增加了两个必然的“偶然”事件发生的机会
通俗一点来讲,中断,意味着中途打断现在在干的事情,要立即处理紧急的事件
现实的例子:手机玩游戏的时候,突然来电话。在编程当中还常遇到实时接收数据的请求,都使用中断服务函数,串口接收数据就是用到中断去接收的

2、中断源(又称之为中断控制器)
(1)中断源:介于事件与CPU之间的电路模块
(2)中断请求信号:当事件引起的,由中断源产生的,能被单片机识别的信号
3、中断类型
中断产生来源于事件 ,因此根据事件来源地,将中断分为外部中断和内部中断两种类型
外部中断是指由单片机外部事件引起的中断
内部中断是指由单片机芯片内部事件引发的中断
4、中断优先级
事件具有不同的轻重、缓急 程度,系统工作时,我们总希望最紧急的事件优先被处理,以保证系统的实时性,这就引出了中断的优先级、中断嵌套问题
二、 STM32的外部中断
1、中断引脚
多达 140 个 GPIO(STM32F405xx/07xx 和 STM32F415xx/17xx)通过以下方式连接到 16 个外部中断/事件线
例如:PA0占用EXTI0,其他的PB0~PI0是不能使用的
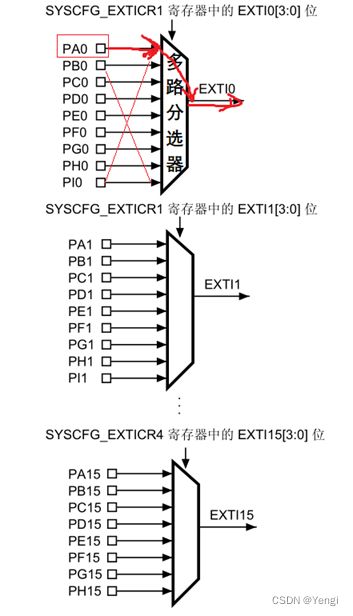
引脚编号决定了对应那个外部中断
三、代码思路
1、8051单片机
外部中断的触发方式:低电平触发、下降沿触发 IT0 = 1
允许外部中断引脚申请中断请求EX0 = 1
优先级的配置
中断服务函数 interrupt 0
注:
51里面的中断服务函数,不能被调用,但是函数的名字是可以任意写的,只需要在函数的后面加上interrupt n 指定这是那一个中断的服务函数即可
2、STM32
端口A硬件时钟使能
SYSCFG硬件时钟使能
配置引脚的工作模式
将引脚连接到外部中断
中断的触发方式:电平触发,边沿触发
允许外部中断引脚申请中断请求
优先级的配置
中断服务函数
注意:
中断服务函数是不能被调用,编写格式不能随意编写,这是它特有的存在形式。不同的硬件平台,其编写方法是不一样的
四、库函数接口
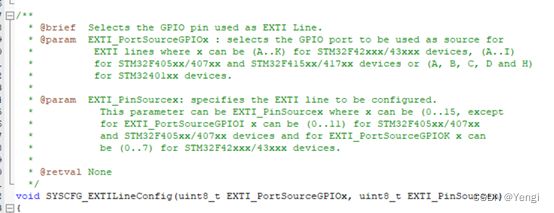
1、为引脚选择使用那个中断
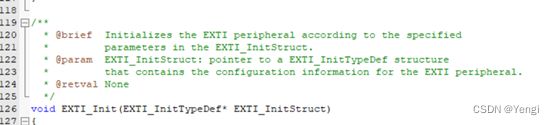
2、配置外部中断
3、中断优先级的配置

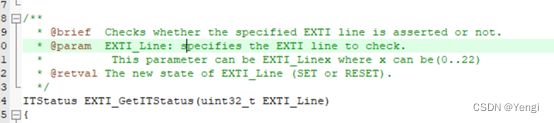
4、获取外部中断状态
5、清空外部中断标志位

注意:清空标志位在中断服务函数里面,一定要加上,如果不加,中断标志位一直有,然后这个中断就会一直产生,中断里面的代码就会重复的一直执行
五、中断优先级
中断优先级的一个意义:出现多个中断同时触发,但是不能同时处理,所以先后顺序之分,要根据实际上的运行环境优先处理重要的中断
1、概述
STM32对中断优先级进行分组,共5组,0~4,这些分组用于指定当前M4支持多少个抢占优先级和响应优先级,同时,对每一个中断设置一个抢占优先级和一个响应优先级,函数原型如下:

NVIC_PriorityGroup_0: 0 bits for pre-emption priority //不支持抢占优先级
4 bits for subpriority //支持16个响应优先级
NVIC_PriorityGroup_1: 1 bits for pre-emption priority //支持2个抢占优先级
3 bits for subpriority //支持8个响应优先级
NVIC_PriorityGroup_2: 2 bits for pre-emption priority //支持4个抢占优先级
2 bits for subpriority //支持4个响应优先级
NVIC_PriorityGroup_3: 3 bits for pre-emption priority //支持8个抢占优先级
1 bits for subpriority //支持2个响应优先级
NVIC_PriorityGroup_4: 4 bits for pre-emption priority //支持16个抢占优先级
0 bits for subpriority //不支持响应优先级
对这个分组只需要开机初始化一次就可以了
2、抢占优先级和响应优先级的区别
1)高抢占优先级是可以打断正在执行的低抢占优先级的中断,若抢占优先级相同,则不会出现抢占的过程
例如:中断0,抢占2,响应3
中断1,抢占3,响应3
中断0的抢占优先级2比中断1的抢占优先级3要高,可以打断正在执行的低抢占优先级的中断
2)抢占优先级相同,高响应优先级不可以打断低响应优先级的中断
例如:中断0,抢占2,响应2
中断1,抢占2,响应3
中断0的响应优先级2比中断1的响应优先级3要高,不可以打断正在执行的低响应优先级的中断
3)抢占优先级相同的中断,当两个中断同时发生的情况下,那个响应优先级高,那个先执行
例如:中断0,抢占2,响应2
中断1,抢占2,响应3
中断0的抢占优先级2和中断1的抢占优先级相同,那么同时执行两个中断,谁的响应优先级高,谁就先执行
4)抢占优先级和响应优先级都相同的中断,假如同时发生,会按照硬件内部的优先级执行

例如:中断0,抢占2,响应2,硬件优先级13
中断1,抢占2,响应2,硬件优先级14
抢占优先级和响应优先级都相同的中断,假如同时发生,硬件优先级高的中断就先执行
5)无论抢占优先级,还是响应优先级,还是硬件内部的优先级,优先级数值越小,就代表优先级越高
应用场景:
比如:
1、手机正在看视频,关机键,音量键,静音键
2、触摸屏的坐标检测
3、数据的接收(串口)
3、中断优先级设置步骤
①系统运行后先设置中断优先级分组。调用函数:
void NVIC_PriorityGroupConfig*(uint32_t* NVIC_PriorityGroup*);*
整个系统执行过程中,只设置一次中断分组。
②针对每个中断,设置对应的抢占优先级和响应优先级:
void NVIC_Init*(NVIC_InitTypeDef** NVIC_InitStruct*);*
③ 如果需要挂起/解挂,查看中断当前激活状态,分别调用相关函数即可。
六、test
eg:利用tim1定时器使led每0.5s闪烁
tim1中断请求函数声明
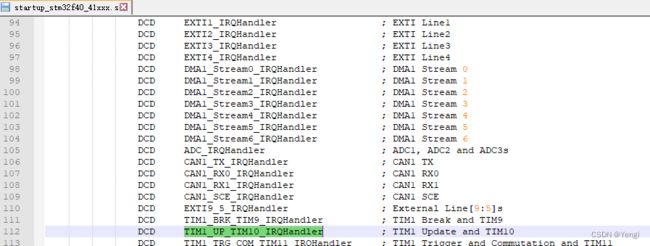
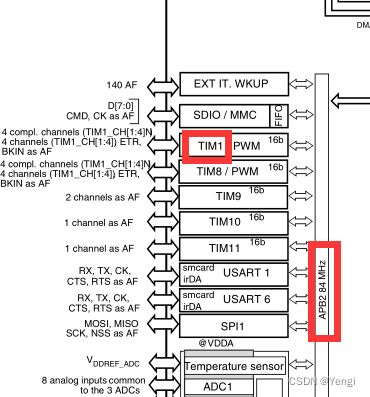
tim1时钟:
定时器请求通道

test
#include "stm32f4xx.h"
//key gpio a 0 e 2 3 4
//led gpio f 9 10 e 13 14
//beep gpio f 8
//位带操作
//寄存器位带别名 = 0x42000000 + (寄存器的地址-0x40000000)*32 + 引脚编号*4
#define PAin(n) *(volatile uint32_t *)(0x42000000+(((uint32_t)&GPIOA->IDR - 0x40000000)<<5) + (n<<2))
#define PEin(n) *(volatile uint32_t *)(0x42000000+(((uint32_t)&GPIOE->IDR - 0x40000000)<<5) + (n<<2))
#define PFout(n) *(volatile uint32_t *)(0x42000000+(((uint32_t)&GPIOF->ODR - 0x40000000)<<5) + (n<<2))
#define PFin(n) *(volatile uint32_t *)(0x42000000+(((uint32_t)&GPIOF->IDR - 0x40000000)<<5) + (n<<2))
#define PEout(n) *(volatile uint32_t *)(0x42000000+((uint32_t)&GPIOE->ODR - 0x40000000)*32+n*4)
#define LED0 PFout(9)
#define LED1 PFout(10)
#define LED2 PEout(13)
#define LED3 PEout(14)
//定义需要配置的硬件结构体
static GPIO_InitTypeDef GPIO_InitStruct;
static TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
static NVIC_InitTypeDef NVIC_InitStruct;
//初始化LED
void init_led_beep()
{
//1、使能AHB1硬件时钟
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOF | RCC_AHB1Periph_GPIOE, ENABLE);
//2、硬件配置
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_OUT; //端口模式配置为输出
GPIO_InitStruct.GPIO_OType = GPIO_OType_PP; //输出配置为推挽输出
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_9|GPIO_Pin_10 | GPIO_Pin_8; //配置引脚编号为9号引脚
GPIO_InitStruct.GPIO_PuPd = GPIO_PuPd_UP; //上拉
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz; //快速50Mhz输出速度
GPIO_Init(GPIOF, &GPIO_InitStruct);
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_13 | GPIO_Pin_14;
GPIO_Init(GPIOE, &GPIO_InitStruct);
//3、使能硬件工作
//GPIO_SetBits(GPIOF, GPIO_Pin_9|GPIO_Pin_10);//设置GPIOF9引脚为高电平,灯灭
PFout(8) = 0;
PFout(9) = 1;
PFout(10) = 1;
PEout(13) = 1;
PEout(14) = 1;
}
void TIm1_init(void)
{
//使能TIM1的硬件时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM1, ENABLE);
//TIM1的硬件配置
//配置定时器1分频值、计数值等等
TIM_TimeBaseStructure.TIM_Period = (10000/2)-1; //计数值 168000000/16800 = 10000hz/2,决定定时时间1/2秒
TIM_TimeBaseStructure.TIM_Prescaler = 16800-1; //预分频值 16800-1 + 1 = 16800
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //向上计数的方法
// TIM_TimeBaseStructure.TIM_ClockDivision = 0; //在F407是不支持
TIM_TimeBaseInit(TIM1, &TIM_TimeBaseStructure);
TIM_ClearFlag(TIM1,TIM_FLAG_Update); //必须先清除配置时候产生的更新标志
//配置定时器1中断的触发方式:时间更新
TIM_ITConfig(TIM1, TIM_IT_Update, ENABLE);
//开启TIM1的NVIC中断
NVIC_InitStruct.NVIC_IRQChannel = TIM1_UP_TIM10_IRQn ; //定时器1的请求通道
NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority = 0x02; //抢占优先级
NVIC_InitStruct.NVIC_IRQChannelSubPriority = 0x02; //响应优先级
NVIC_InitStruct.NVIC_IRQChannelCmd = ENABLE; //使能该通道中断,失能
NVIC_Init(&NVIC_InitStruct);
//使能定时器3工作
TIM_Cmd(TIM1, ENABLE);
}
void TIM1_UP_TIM10_IRQHandler(void)
{
//判断TIM3是否有中断请求
if(TIM_GetITStatus(TIM1, TIM_IT_Update) == SET)
{
LED1 ^= 1;
//清空标志位,告诉CPU,已经完成当前中断处理,可以响应新的中断请求
TIM_ClearITPendingBit(TIM1, TIM_IT_Update);
}
}
int main(void)
{
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_SYSCFG, ENABLE);//使能SYSCFG时钟
init_led_beep();
TIm1_init();
while(1)
{}
return 0;
}