【OpenCV】(七)图像模板匹配和霍夫变换
目录
图像模板匹配
图像霍夫线检测
图像霍夫圆检测
图像模板匹配
# 模板匹配
# 在给定的图片中查找和木板最相似的区域
# 输入包括模板和图片
# 思路:按照滑窗的思路不断移动模板图片,计算其与图像中对应区域的匹配度,最终将匹配度最高的区域选择为最终的结果
import cv2 as cv
import matplotlib.pyplot as plt
# 图像和图像模板读取
img = cv.imread("picture/apple.jpg")
template = cv.imread("picture/bigapple.jpg")
h, w, l = template.shape
# 模板匹配
# res = cv2.matchTemplate(img, template, method)
# img: 要进行模板匹配的图像
# Template: 模板
# method: 实现模板匹配的算法:
# 1. 平方差匹配(CV_TM_SQDIFF): 利用模板与图像之间的平方差进行匹配,最好的匹配时0,匹配越差,匹配的值越大
# 2. 相关匹配(CV_TM_CCORR): 利用模板与图像间的乘法进行匹配,数值越大表示匹配程度较高,越小表示匹配程度越低
# 3. 相关系数匹配(CV_TM_CCOEFF): 利用模板与图像间的相关系数匹配,1表示完美的匹配,-1表示最差的匹配
res = cv.matchTemplate(img, template, cv.TM_CCOEFF)
# 返回图像中最匹配的位置,确定左上角的坐标,并将匹配位置绘制在图像上
# 使用cv.minMaxLoc()方法查找最大值所在的位置
min_val, max_val, min_loc, max_loc = cv.minMaxLoc(res)
# 使用平方差作为比较方法时,最小值位置是最佳匹配位置
# top_left = min_loc
top_left = max_loc
bottom_right = (top_left[0] + w, top_left[1] + h)
cv.rectangle(img, top_left, bottom_right, (0, 255, 0), 2)
# 图像显示
plt.imshow(img[:, :, :: -1])
plt.show()
运行结果
原图: 模板:
模板:
模板匹配: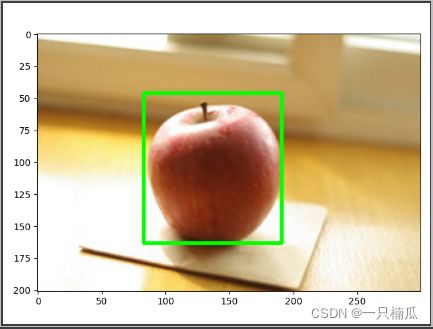
图像霍夫线检测
# 霍夫线检测
# 霍夫变换常用来提取图像中的直线和圆等几何形状
import numpy as np
import cv2 as cv
import matplotlib.pyplot as plt
# 加载图片,转为二值图
img = cv.imread('picture/calendar.jpg')
gray = cv.cvtColor(img, cv.COLOR_BGR2GRAY)
# Canny边缘检测
edges = cv.Canny(gray, 50, 150)
# 霍夫直线变换
# cv2.HoughLines(img, rho, theta, threshold)
# img: 检测的图像,要求是二值化后的图像,所以在调用霍夫变换之前首先要进行二值化,或者进行Canny边缘检测
# rho,theta: ρ和θ的精确度
# threshold: 阈值,只有累加器中的值高于该阈值时才被认为是直线
lines = cv.HoughLines(edges, 0.8, np.pi / 180, 150)
# 将检测的线绘制到图像上(注意是极坐标)
for line in lines:
rho, theta = line[0]
a = np.cos(theta)
b = np.sin(theta)
x0 = a * rho
y0 = b * rho
x1 = int(x0 + 1000 * (-b))
y1 = int(y0 + 1000 * (a))
x2 = int(x0 - 1000 * (-b))
y2 = int(y0 - 1000 * (a))
cv.line(img, (x1, y1), (x2, y2), (0, 255, 0))
# 图像显示
plt.imshow(img[:, :, :: -1])
plt.show()运行结果
原图: 霍夫线检测:
霍夫线检测: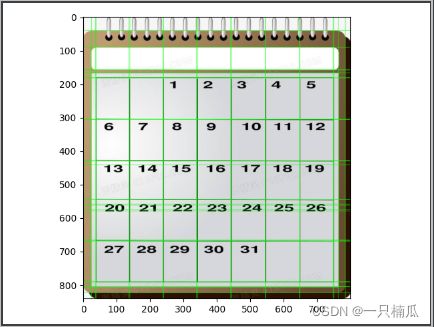
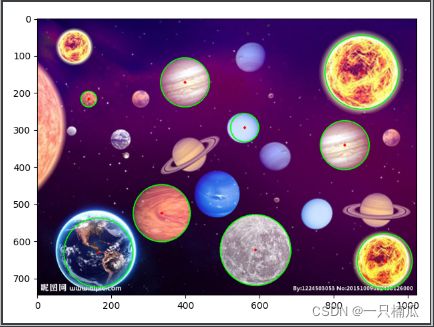
图像霍夫圆检测
# 霍夫圆检测
# 霍夫梯度法将霍夫圆检测分为两个阶段,第一阶段检测圆心,第二阶段利用圆心推导出圆半径
# 圆心检测原理:圆心是圆周法线的交汇处,设置一个阈值,在某点的相交的直线的条数大于这个阈值就认为该距离是该圆心的半径
import cv2 as cv
import matplotlib.pyplot as plt
# 读取图像,并转换为灰度图
ball = cv.imread('picture/ball.jpg')
gray_img = cv.cvtColor(ball, cv.COLOR_BGR2GRAY)
# 进行中值模糊,去噪点
img = cv.medianBlur(gray_img, 7)
# 霍夫圆检测
# circles = cv.HoughCircles(image, method, dp, minDist, paraml = 100, param2 = 100, minRadius = 0, maxRadius = 0)
# image: 输入图像,应输入灰度图像
# method: 使用霍夫变换圆检测的算法,它的参数是CV_HOUGH_GRADIENT
# dp: 霍夫空间的分辨率,dp=1时表示霍夫空间与输入图像空间的大小一致,dp=2时霍夫空间是输入图像空间的一半,以此类推
# minDist: 圆心之间的最小距离,如果检测到的两个圆心之间距离小于该值,则认为它们是同一个圆心
# param1: 边缘检测时使用Canny算子的高阈值,低阈值时高阈值的一半
# param2: 检测圆心和确定半径时所共有的阈值
# minRadius和maxRadius为所检测到的圆半径的最小值和最大值
circles = cv.HoughCircles(img, cv.HOUGH_GRADIENT, 1, 200, param1=100, param2=30, minRadius=0, maxRadius=100)
# 将检测结果绘制在图像上
for i in circles[0, :]: # 遍历矩阵每一行的数据
# 绘制圆形
cv.circle(ball, (int(i[0]), int(i[1])), int(i[2]), (0, 255, 0), 2)
# 绘制圆心
cv.circle(ball, (int(i[0]), int(i[1])), 2, (0, 0, 255), 3)
# 图像显示
plt.imshow(ball[:, :, :: -1])
plt.show()运行结果
原图: 霍夫圆检测:
霍夫圆检测: