STM32F4xx系列使用HAL库配置SPI-读写FLASH
SPI协议简介

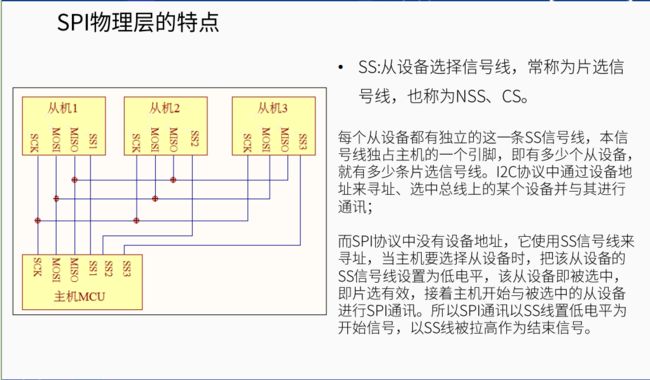
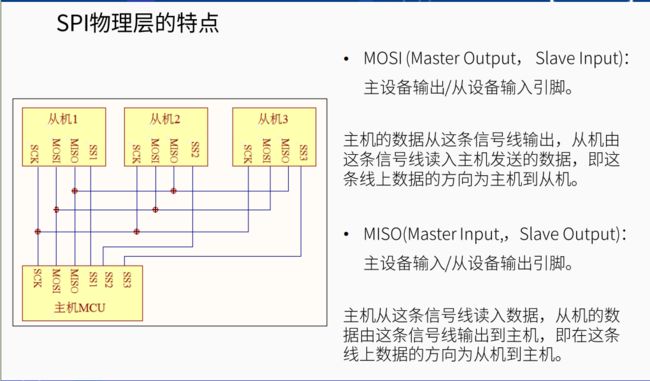
SPI物理层特点

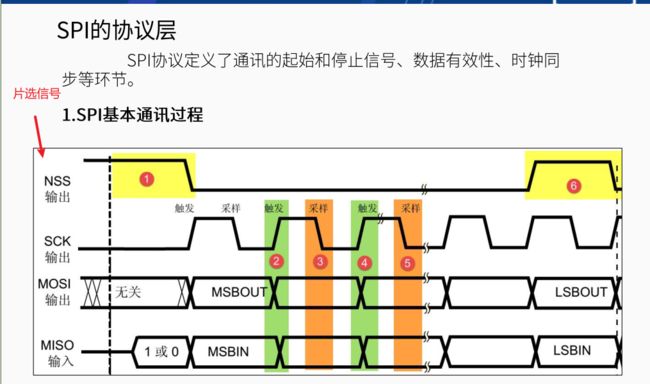
SPI协议层




QSPI协议简介



SPI框图

Flash写入与EEPROM有点相似,不同的是FLASH写入需要软件手动擦除,而EEPROM不用

SPI配置流程
1、初始化通讯使用的目标引脚及端口时钟
2、使能SPI外设的时钟
3、配置SPI外设的模式、地址、速率等参数并使能SPI外设
4、编写基本SPI按字节收发的函数
将片选信号拉低
查看数据发送完成标志,如果标志不存在
将数据写入SPI数据寄存器
5、编写对FLASH擦除及读写操作的函数
6、编写测试程序,对读写数据进行校验
HAL库读写串行FLASH(W125Q128)实验


flash 0xAB指令

flash 0x90指令
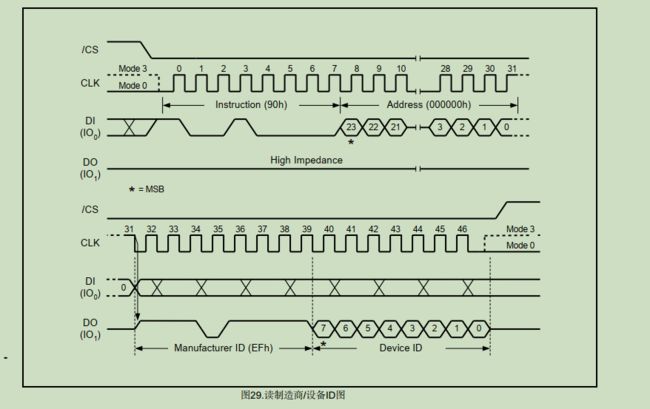
注意FLASH地址是24位的

这里直接放spi_flash的板级支持包,直接调用即可
可以直接将CubeMX生成的源文件spi.c和spi.h替换成下述文件即可
spi.c
/**
******************************************************************************
* @file spi.c
* @brief This file provides code for the configuration
* of the SPI instances.
******************************************************************************
* @attention
*
* © Copyright (c) 2022 STMicroelectronics.
* All rights reserved.
*
* This software component is licensed by ST under BSD 3-Clause license,
* the "License"; You may not use this file except in compliance with the
* License. You may obtain a copy of the License at:
* opensource.org/licenses/BSD-3-Clause
*
******************************************************************************
*/
/* Includes ------------------------------------------------------------------*/
#include "spi.h"
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
SPI_HandleTypeDef SpiHandle;
static __IO uint32_t SPITimeout = SPIT_LONG_TIMEOUT;
static uint16_t SPI_TIMEOUT_UserCallback(uint8_t errorCode);
/**
* @brief SPI MSP Initialization
* This function configures the hardware resources used in this example:
* - Peripheral's clock enable
* - Peripheral's GPIO Configuration
* @param hspi: SPI handle pointer
* @retval None
*/
void HAL_SPI_MspInit(SPI_HandleTypeDef *hspi)
{
GPIO_InitTypeDef GPIO_InitStruct;
/*##-1- Enable peripherals and GPIO Clocks #################################*/
/* Enable GPIO TX/RX clock */
SPIx_SCK_GPIO_CLK_ENABLE();
SPIx_MISO_GPIO_CLK_ENABLE();
SPIx_MOSI_GPIO_CLK_ENABLE();
SPIx_CS_GPIO_CLK_ENABLE();
/* Enable SPI clock */
SPIx_CLK_ENABLE();
/*##-2- Configure peripheral GPIO ##########################################*/
/* SPI SCK GPIO pin configuration */
GPIO_InitStruct.Pin = SPIx_SCK_PIN;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_PULLUP;
GPIO_InitStruct.Speed = GPIO_SPEED_FAST;
GPIO_InitStruct.Alternate = SPIx_SCK_AF;
HAL_GPIO_Init(SPIx_SCK_GPIO_PORT, &GPIO_InitStruct);
/* SPI MISO GPIO pin configuration */
GPIO_InitStruct.Pin = SPIx_MISO_PIN;
GPIO_InitStruct.Alternate = SPIx_MISO_AF;
HAL_GPIO_Init(SPIx_MISO_GPIO_PORT, &GPIO_InitStruct);
/* SPI MOSI GPIO pin configuration */
GPIO_InitStruct.Pin = SPIx_MOSI_PIN;
GPIO_InitStruct.Alternate = SPIx_MOSI_AF;
HAL_GPIO_Init(SPIx_MOSI_GPIO_PORT, &GPIO_InitStruct);
GPIO_InitStruct.Pin = FLASH_CS_PIN ;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
HAL_GPIO_Init(FLASH_CS_GPIO_PORT, &GPIO_InitStruct);
}
void SPI_FLASH_Init(void)
{
/*##-1- Configure the SPI peripheral #######################################*/
/* Set the SPI parameters */
SpiHandle.Instance = SPIx;
SpiHandle.Init.BaudRatePrescaler = SPI_BAUDRATEPRESCALER_2;
SpiHandle.Init.Direction = SPI_DIRECTION_2LINES;
SpiHandle.Init.CLKPhase = SPI_PHASE_2EDGE;
SpiHandle.Init.CLKPolarity = SPI_POLARITY_HIGH;
SpiHandle.Init.CRCCalculation = SPI_CRCCALCULATION_DISABLE;
SpiHandle.Init.CRCPolynomial = 7;
SpiHandle.Init.DataSize = SPI_DATASIZE_8BIT;
SpiHandle.Init.FirstBit = SPI_FIRSTBIT_MSB;
SpiHandle.Init.NSS = SPI_NSS_SOFT;
SpiHandle.Init.TIMode = SPI_TIMODE_DISABLE;
SpiHandle.Init.Mode = SPI_MODE_MASTER;
HAL_SPI_Init(&SpiHandle);
__HAL_SPI_ENABLE(&SpiHandle);
}
/**
* @brief 擦除FLASH扇区
* @param SectorAddr:要擦除的扇区地址
* @retval 无
*/
void SPI_FLASH_SectorErase(uint32_t SectorAddr)
{
/* 发送FLASH写使能命令 */
SPI_FLASH_WriteEnable();
SPI_FLASH_WaitForWriteEnd();
/* 擦除扇区 */
/* 选择FLASH: CS低电平 */
SPI_FLASH_CS_LOW();
/* 发送扇区擦除指令*/
SPI_FLASH_SendByte(W25X_SectorErase);
/*发送擦除扇区地址的高位*/
SPI_FLASH_SendByte((SectorAddr & 0xFF0000) >> 16);
/* 发送擦除扇区地址的中位 */
SPI_FLASH_SendByte((SectorAddr & 0xFF00) >> 8);
/* 发送擦除扇区地址的低位 */
SPI_FLASH_SendByte(SectorAddr & 0xFF);
/* 停止信号 FLASH: CS 高电平 */
SPI_FLASH_CS_HIGH();
/* 等待擦除完毕*/
SPI_FLASH_WaitForWriteEnd();
}
/**
* @brief 擦除FLASH扇区,整片擦除
* @param 无
* @retval 无
*/
void SPI_FLASH_BulkErase(void)
{
/* 发送FLASH写使能命令 */
SPI_FLASH_WriteEnable();
/* 整块 Erase */
/* 选择FLASH: CS低电平 */
SPI_FLASH_CS_LOW();
/* 发送整块擦除指令*/
SPI_FLASH_SendByte(W25X_ChipErase);
/* 停止信号 FLASH: CS 高电平 */
SPI_FLASH_CS_HIGH();
/* 等待擦除完毕*/
SPI_FLASH_WaitForWriteEnd();
}
/**
* @brief 对FLASH按页写入数据,调用本函数写入数据前需要先擦除扇区
* @param pBuffer,要写入数据的指针
* @param WriteAddr,写入地址
* @param NumByteToWrite,写入数据长度,必须小于等于SPI_FLASH_PerWritePageSize
* @retval 无
*/
void SPI_FLASH_PageWrite(uint8_t* pBuffer, uint32_t WriteAddr, uint16_t NumByteToWrite)
{
/* 发送FLASH写使能命令 */
SPI_FLASH_WriteEnable();
/* 选择FLASH: CS低电平 */
SPI_FLASH_CS_LOW();
/* 写页写指令*/
SPI_FLASH_SendByte(W25X_PageProgram);
/*发送写地址的高位*/
SPI_FLASH_SendByte((WriteAddr & 0xFF0000) >> 16);
/*发送写地址的中位*/
SPI_FLASH_SendByte((WriteAddr & 0xFF00) >> 8);
/*发送写地址的低位*/
SPI_FLASH_SendByte(WriteAddr & 0xFF);
if(NumByteToWrite > SPI_FLASH_PerWritePageSize)
{
NumByteToWrite = SPI_FLASH_PerWritePageSize;
FLASH_ERROR("SPI_FLASH_PageWrite too large!");
}
/* 写入数据*/
while (NumByteToWrite--)
{
/* 发送当前要写入的字节数据 */
SPI_FLASH_SendByte(*pBuffer);
/* 指向下一字节数据 */
pBuffer++;
}
/* 停止信号 FLASH: CS 高电平 */
SPI_FLASH_CS_HIGH();
/* 等待写入完毕*/
SPI_FLASH_WaitForWriteEnd();
}
/**
* @brief 对FLASH写入数据,调用本函数写入数据前需要先擦除扇区
* @param pBuffer,要写入数据的指针
* @param WriteAddr,写入地址
* @param NumByteToWrite,写入数据长度
* @retval 无
*/
void SPI_FLASH_BufferWrite(uint8_t* pBuffer, uint32_t WriteAddr, uint16_t NumByteToWrite)
{
uint8_t NumOfPage = 0, NumOfSingle = 0, Addr = 0, count = 0, temp = 0;
/*mod运算求余,若writeAddr是SPI_FLASH_PageSize整数倍,运算结果Addr值为0*/
Addr = WriteAddr % SPI_FLASH_PageSize;
/*差count个数据值,刚好可以对齐到页地址*/
count = SPI_FLASH_PageSize - Addr;
/*计算出要写多少整数页*/
NumOfPage = NumByteToWrite / SPI_FLASH_PageSize;
/*mod运算求余,计算出剩余不满一页的字节数*/
NumOfSingle = NumByteToWrite % SPI_FLASH_PageSize;
/* Addr=0,则WriteAddr 刚好按页对齐 aligned */
if (Addr == 0)
{
/* NumByteToWrite < SPI_FLASH_PageSize */
if (NumOfPage == 0)
{
SPI_FLASH_PageWrite(pBuffer, WriteAddr, NumByteToWrite);
}
else /* NumByteToWrite > SPI_FLASH_PageSize */
{
/*先把整数页都写了*/
while (NumOfPage--)
{
SPI_FLASH_PageWrite(pBuffer, WriteAddr, SPI_FLASH_PageSize);
WriteAddr += SPI_FLASH_PageSize;
pBuffer += SPI_FLASH_PageSize;
}
/*若有多余的不满一页的数据,把它写完*/
SPI_FLASH_PageWrite(pBuffer, WriteAddr, NumOfSingle);
}
}
/* 若地址与 SPI_FLASH_PageSize 不对齐 */
else
{
/* NumByteToWrite < SPI_FLASH_PageSize */
if (NumOfPage == 0)
{
/*当前页剩余的count个位置比NumOfSingle小,写不完*/
if (NumOfSingle > count)
{
temp = NumOfSingle - count;
/*先写满当前页*/
SPI_FLASH_PageWrite(pBuffer, WriteAddr, count);
WriteAddr += count;
pBuffer += count;
/*再写剩余的数据*/
SPI_FLASH_PageWrite(pBuffer, WriteAddr, temp);
}
else /*当前页剩余的count个位置能写完NumOfSingle个数据*/
{
SPI_FLASH_PageWrite(pBuffer, WriteAddr, NumByteToWrite);
}
}
else /* NumByteToWrite > SPI_FLASH_PageSize */
{
/*地址不对齐多出的count分开处理,不加入这个运算*/
NumByteToWrite -= count;
NumOfPage = NumByteToWrite / SPI_FLASH_PageSize;
NumOfSingle = NumByteToWrite % SPI_FLASH_PageSize;
SPI_FLASH_PageWrite(pBuffer, WriteAddr, count);
WriteAddr += count;
pBuffer += count;
/*把整数页都写了*/
while (NumOfPage--)
{
SPI_FLASH_PageWrite(pBuffer, WriteAddr, SPI_FLASH_PageSize);
WriteAddr += SPI_FLASH_PageSize;
pBuffer += SPI_FLASH_PageSize;
}
/*若有多余的不满一页的数据,把它写完*/
if (NumOfSingle != 0)
{
SPI_FLASH_PageWrite(pBuffer, WriteAddr, NumOfSingle);
}
}
}
}
/**
* @brief 读取FLASH数据
* @param pBuffer,存储读出数据的指针
* @param ReadAddr,读取地址
* @param NumByteToRead,读取数据长度
* @retval 无
*/
void SPI_FLASH_BufferRead(uint8_t* pBuffer, uint32_t ReadAddr, uint16_t NumByteToRead)
{
/* 选择FLASH: CS低电平 */
SPI_FLASH_CS_LOW();
/* 发送 读 指令 */
SPI_FLASH_SendByte(W25X_ReadData);
/* 发送 读 地址高位 */
SPI_FLASH_SendByte((ReadAddr & 0xFF0000) >> 16);
/* 发送 读 地址中位 */
SPI_FLASH_SendByte((ReadAddr& 0xFF00) >> 8);
/* 发送 读 地址低位 */
SPI_FLASH_SendByte(ReadAddr & 0xFF);
/* 读取数据 */
while (NumByteToRead--)
{
/* 读取一个字节*/
*pBuffer = SPI_FLASH_SendByte(Dummy_Byte);
/* 指向下一个字节缓冲区 */
pBuffer++;
}
/* 停止信号 FLASH: CS 高电平 */
SPI_FLASH_CS_HIGH();
}
/**
* @brief 读取FLASH ID
* @param 无
* @retval FLASH ID
*/
uint32_t SPI_FLASH_ReadID(void)
{
uint32_t Temp = 0, Temp0 = 0, Temp1 = 0, Temp2 = 0;
/* 开始通讯:CS低电平 */
SPI_FLASH_CS_LOW();
/* 发送JEDEC指令,读取ID */
SPI_FLASH_SendByte(W25X_JedecDeviceID);
/* 读取一个字节数据 */
Temp0 = SPI_FLASH_SendByte(Dummy_Byte);
/* 读取一个字节数据 */
Temp1 = SPI_FLASH_SendByte(Dummy_Byte);
/* 读取一个字节数据 */
Temp2 = SPI_FLASH_SendByte(Dummy_Byte);
/* 停止通讯:CS高电平 */
SPI_FLASH_CS_HIGH();
/*把数据组合起来,作为函数的返回值*/
Temp = (Temp0 << 16) | (Temp1 << 8) | Temp2;
return Temp;
}
/**
* @brief 读取FLASH Device ID
* @param 无
* @retval FLASH Device ID
*/
uint32_t SPI_FLASH_ReadDeviceID(void)
{
uint32_t Temp = 0;
/* Select the FLASH: Chip Select low */
SPI_FLASH_CS_LOW();
/* Send "RDID " instruction */
SPI_FLASH_SendByte(W25X_DeviceID);
SPI_FLASH_SendByte(Dummy_Byte);
SPI_FLASH_SendByte(Dummy_Byte);
SPI_FLASH_SendByte(Dummy_Byte);
/* Read a byte from the FLASH */
Temp = SPI_FLASH_SendByte(Dummy_Byte);
/* Deselect the FLASH: Chip Select high */
SPI_FLASH_CS_HIGH();
return Temp;
}
/*******************************************************************************
* Function Name : SPI_FLASH_StartReadSequence
* Description : Initiates a read data byte (READ) sequence from the Flash.
* This is done by driving the /CS line low to select the device,
* then the READ instruction is transmitted followed by 3 bytes
* address. This function exit and keep the /CS line low, so the
* Flash still being selected. With this technique the whole
* content of the Flash is read with a single READ instruction.
* Input : - ReadAddr : FLASH's internal address to read from.
* Output : None
* Return : None
*******************************************************************************/
void SPI_FLASH_StartReadSequence(uint32_t ReadAddr)
{
/* Select the FLASH: Chip Select low */
SPI_FLASH_CS_LOW();
/* Send "Read from Memory " instruction */
SPI_FLASH_SendByte(W25X_ReadData);
/* Send the 24-bit address of the address to read from -----------------------*/
/* Send ReadAddr high nibble address byte */
SPI_FLASH_SendByte((ReadAddr & 0xFF0000) >> 16);
/* Send ReadAddr medium nibble address byte */
SPI_FLASH_SendByte((ReadAddr& 0xFF00) >> 8);
/* Send ReadAddr low nibble address byte */
SPI_FLASH_SendByte(ReadAddr & 0xFF);
}
/**
* @brief 使用SPI读取一个字节的数据
* @param 无
* @retval 返回接收到的数据
*/
uint8_t SPI_FLASH_ReadByte(void)
{
return (SPI_FLASH_SendByte(Dummy_Byte));
}
/**
* @brief 使用SPI发送一个字节的数据
* @param byte:要发送的数据
* @retval 返回接收到的数据
*/
uint8_t SPI_FLASH_SendByte(uint8_t byte)
{
SPITimeout = SPIT_FLAG_TIMEOUT;
/* 等待发送缓冲区为空,TXE事件 */
while (__HAL_SPI_GET_FLAG( &SpiHandle, SPI_FLAG_TXE ) == RESET)
{
if((SPITimeout--) == 0) return SPI_TIMEOUT_UserCallback(0);
}
/* 写入数据寄存器,把要写入的数据写入发送缓冲区 */
WRITE_REG(SpiHandle.Instance->DR, byte);
SPITimeout = SPIT_FLAG_TIMEOUT;
/* 等待接收缓冲区非空,RXNE事件 */
while (__HAL_SPI_GET_FLAG( &SpiHandle, SPI_FLAG_RXNE ) == RESET)
{//发送缓冲区会在下一个周期将数据发送出去
if((SPITimeout--) == 0) return SPI_TIMEOUT_UserCallback(1);
}
/* 读取数据寄存器,获取接收缓冲区数据 */
return READ_REG(SpiHandle.Instance->DR);
// static uint8_t Rx_Data[1];
// static uint8_t Tx_Data[1];
// Tx_Data[0]=byte;
// if(HAL_SPI_TransmitReceive(&SpiHandle,Tx_Data,Rx_Data,1,1000)!=HAL_OK)
// {
// return 0;
// }
// return Rx_Data[0];
}
/*******************************************************************************
* Function Name : SPI_FLASH_SendHalfWord
* Description : Sends a Half Word through the SPI interface and return the
* Half Word received from the SPI bus.
* Input : Half Word : Half Word to send.
* Output : None
* Return : The value of the received Half Word.
*******************************************************************************/
uint16_t SPI_FLASH_SendHalfWord(uint16_t HalfWord)
{
SPITimeout = SPIT_FLAG_TIMEOUT;
/* Loop while DR register in not emplty */
while (__HAL_SPI_GET_FLAG( &SpiHandle, SPI_FLAG_TXE ) == RESET)
{
if((SPITimeout--) == 0) return SPI_TIMEOUT_UserCallback(2);
}
/* Send Half Word through the SPIx peripheral */
WRITE_REG(SpiHandle.Instance->DR, HalfWord);
SPITimeout = SPIT_FLAG_TIMEOUT;
/* Wait to receive a Half Word */
while (__HAL_SPI_GET_FLAG( &SpiHandle, SPI_FLAG_RXNE ) == RESET)
{
if((SPITimeout--) == 0) return SPI_TIMEOUT_UserCallback(3);
}
/* Return the Half Word read from the SPI bus */
return READ_REG(SpiHandle.Instance->DR);
}
/**
* @brief 向FLASH发送 写使能 命令
* @param none
* @retval none
*/
void SPI_FLASH_WriteEnable(void)
{
/* 通讯开始:CS低 */
SPI_FLASH_CS_LOW();
/* 发送写使能命令*/
SPI_FLASH_SendByte(W25X_WriteEnable);
/*通讯结束:CS高 */
SPI_FLASH_CS_HIGH();
}
/**
* @brief 等待WIP(BUSY)标志被置0,即等待到FLASH内部数据写入完毕
* @param none
* @retval none
*/
void SPI_FLASH_WaitForWriteEnd(void)
{
uint8_t FLASH_Status = 0;
/* 选择 FLASH: CS 低 */
SPI_FLASH_CS_LOW();
/* 发送 读状态寄存器 命令 */
SPI_FLASH_SendByte(W25X_ReadStatusReg);
SPITimeout = SPIT_FLAG_TIMEOUT;
/* 若FLASH忙碌,则等待 */
do
{
/* 读取FLASH芯片的状态寄存器 */
FLASH_Status = SPI_FLASH_SendByte(Dummy_Byte);
{
if((SPITimeout--) == 0)
{
SPI_TIMEOUT_UserCallback(4);
return;
}
}
}
while ((FLASH_Status & WIP_Flag) == SET); /* 正在写入标志 */
/* 停止信号 FLASH: CS 高 */
SPI_FLASH_CS_HIGH();
}
//进入掉电模式
void SPI_Flash_PowerDown(void)
{
/* 选择 FLASH: CS 低 */
SPI_FLASH_CS_LOW();
/* 发送 掉电 命令 */
SPI_FLASH_SendByte(W25X_PowerDown);
/* 停止信号 FLASH: CS 高 */
SPI_FLASH_CS_HIGH();
}
//唤醒
void SPI_Flash_WAKEUP(void)
{
/*选择 FLASH: CS 低 */
SPI_FLASH_CS_LOW();
/* 发上 上电 命令 */
SPI_FLASH_SendByte(W25X_ReleasePowerDown);
/* 停止信号 FLASH: CS 高 */
SPI_FLASH_CS_HIGH(); //等待TRES1
}
/**
* @brief 等待超时回调函数
* @param None.
* @retval None.
*/
static uint16_t SPI_TIMEOUT_UserCallback(uint8_t errorCode)
{
/* 等待超时后的处理,输出错误信息 */
FLASH_ERROR("SPI 等待超时!errorCode = %d",errorCode);
return 0;
}
/*********************************************END OF FILE**********************/spi.h
/**
******************************************************************************
* @file spi.h
* @brief This file contains all the function prototypes for
* the spi.c file
******************************************************************************
* @attention
*
* © Copyright (c) 2022 STMicroelectronics.
* All rights reserved.
*
* This software component is licensed by ST under BSD 3-Clause license,
* the "License"; You may not use this file except in compliance with the
* License. You may obtain a copy of the License at:
* opensource.org/licenses/BSD-3-Clause
*
******************************************************************************
*/
/* Define to prevent recursive inclusion -------------------------------------*/
#ifndef __SPI_H__
#define __SPI_H__
#ifdef __cplusplus
extern "C" {
#endif
/* Includes ------------------------------------------------------------------*/
#include "main.h"
/* USER CODE BEGIN Includes */
/* USER CODE END Includes */
#define sFLASH_ID 0XEF4018 //W25Q128
//#define SPI_FLASH_PageSize 4096
#define SPI_FLASH_PageSize 256
#define SPI_FLASH_PerWritePageSize 256
/* Private define ------------------------------------------------------------*/
/*命令定义-开头*******************************/
#define W25X_WriteEnable 0x06
#define W25X_WriteDisable 0x04
#define W25X_ReadStatusReg 0x05
#define W25X_WriteStatusReg 0x01
#define W25X_ReadData 0x03
#define W25X_FastReadData 0x0B
#define W25X_FastReadDual 0x3B
#define W25X_PageProgram 0x02
#define W25X_BlockErase 0xD8
#define W25X_SectorErase 0x20
#define W25X_ChipErase 0xC7
#define W25X_PowerDown 0xB9
#define W25X_ReleasePowerDown 0xAB
#define W25X_DeviceID 0xAB
#define W25X_ManufactDeviceID 0x90
#define W25X_JedecDeviceID 0x9F
#define WIP_Flag 0x01 /* Write In Progress (WIP) flag */
#define Dummy_Byte 0xFF
/*命令定义-结尾*******************************/
//SPI号及时钟初始化函数
#define SPIx SPI1
#define SPIx_CLK_ENABLE() __HAL_RCC_SPI1_CLK_ENABLE()
#define SPIx_SCK_GPIO_CLK_ENABLE() __HAL_RCC_GPIOB_CLK_ENABLE()
#define SPIx_MISO_GPIO_CLK_ENABLE() __HAL_RCC_GPIOB_CLK_ENABLE()
#define SPIx_MOSI_GPIO_CLK_ENABLE() __HAL_RCC_GPIOB_CLK_ENABLE()
#define SPIx_CS_GPIO_CLK_ENABLE() __HAL_RCC_GPIOG_CLK_ENABLE()
#define SPIx_FORCE_RESET() __HAL_RCC_SPI1_FORCE_RESET()
#define SPIx_RELEASE_RESET() __HAL_RCC_SPI1_RELEASE_RESET()
//SCK引脚
#define SPIx_SCK_PIN GPIO_PIN_3
#define SPIx_SCK_GPIO_PORT GPIOB
#define SPIx_SCK_AF GPIO_AF5_SPI1
//MISO引脚
#define SPIx_MISO_PIN GPIO_PIN_4
#define SPIx_MISO_GPIO_PORT GPIOB
#define SPIx_MISO_AF GPIO_AF5_SPI1
//MOSI引脚
#define SPIx_MOSI_PIN GPIO_PIN_5
#define SPIx_MOSI_GPIO_PORT GPIOB
#define SPIx_MOSI_AF GPIO_AF5_SPI1
//CS(NSS)引脚
#define FLASH_CS_PIN GPIO_PIN_6
#define FLASH_CS_GPIO_PORT GPIOG
//设置为高电平
#define digitalHi(p,i) {p->BSRR=i;}
//输出低电平
#define digitalLo(p,i) {p->BSRR=(uint32_t)i << 16;}
#define SPI_FLASH_CS_LOW() digitalLo(FLASH_CS_GPIO_PORT,FLASH_CS_PIN )
#define SPI_FLASH_CS_HIGH() digitalHi(FLASH_CS_GPIO_PORT,FLASH_CS_PIN )
/*SPI接口定义-结尾****************************/
/*等待超时时间*/
#define SPIT_FLAG_TIMEOUT ((uint32_t)0x1000)
#define SPIT_LONG_TIMEOUT ((uint32_t)(10 * SPIT_FLAG_TIMEOUT))
/*信息输出*/
#define FLASH_DEBUG_ON 1
#define FLASH_INFO(fmt,arg...) printf("<<-FLASH-INFO->> "fmt"\n",##arg)
#define FLASH_ERROR(fmt,arg...) printf("<<-FLASH-ERROR->> "fmt"\n",##arg)
#define FLASH_DEBUG(fmt,arg...) do{\
if(FLASH_DEBUG_ON)\
printf("<<-FLASH-DEBUG->> [%d]"fmt"\n",__LINE__, ##arg);\
}while(0)
void SPI_FLASH_Init(void);
void SPI_FLASH_SectorErase(uint32_t SectorAddr);
void SPI_FLASH_BulkErase(void);
void SPI_FLASH_PageWrite(uint8_t* pBuffer, uint32_t WriteAddr, uint16_t NumByteToWrite);
void SPI_FLASH_BufferWrite(uint8_t* pBuffer, uint32_t WriteAddr, uint16_t NumByteToWrite);
void SPI_FLASH_BufferRead(uint8_t* pBuffer, uint32_t ReadAddr, uint16_t NumByteToRead);
uint32_t SPI_FLASH_ReadID(void);
uint32_t SPI_FLASH_ReadDeviceID(void);
void SPI_FLASH_StartReadSequence(uint32_t ReadAddr);
void SPI_Flash_PowerDown(void);
void SPI_Flash_WAKEUP(void);
uint8_t SPI_FLASH_ReadByte(void);
uint8_t SPI_FLASH_SendByte(uint8_t byte);
uint16_t SPI_FLASH_SendHalfWord(uint16_t HalfWord);
void SPI_FLASH_WriteEnable(void);
void SPI_FLASH_WaitForWriteEnd(void);
#endif /* __SPI_FLASH_H */main.c
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* © Copyright (c) 2022 STMicroelectronics.
* All rights reserved.
*
* This software component is licensed by ST under BSD 3-Clause license,
* the "License"; You may not use this file except in compliance with the
* License. You may obtain a copy of the License at:
* opensource.org/licenses/BSD-3-Clause
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "spi.h"
#include "usart.h"
#include "gpio.h"
#include
void SystemClock_Config(void);
typedef enum { FAILED = 0, PASSED = !FAILED} TestStatus;
/* 获取缓冲区的长度 */
#define TxBufferSize1 (countof(TxBuffer1) - 1)
#define RxBufferSize1 (countof(TxBuffer1) - 1)
#define countof(a) (sizeof(a) / sizeof(*(a)))
#define BufferSize (countof(Tx_Buffer)-1)
#define FLASH_WriteAddress 0x00000
#define FLASH_ReadAddress FLASH_WriteAddress
#define FLASH_SectorToErase FLASH_WriteAddress
/* 发送缓冲区初始化 */
uint8_t Tx_Buffer[] = "hello world!";
uint8_t Rx_Buffer[BufferSize];
//读取的ID存储位置
__IO uint32_t DeviceID = 0;
__IO uint32_t FlashID = 0;
__IO TestStatus TransferStatus1 = FAILED;
TestStatus Buffercmp(uint8_t* pBuffer1, uint8_t* pBuffer2, uint16_t BufferLength);
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
/* 16M串行flash W25Q128初始化 */
SPI_FLASH_Init();
MX_USART1_UART_Init();
printf("\r\n这是一个16M串行flash(W25Q128)实验(QSPI驱动) \r\n");
/* 16M串行flash W25Q128初始化 */
/* 获取 Flash Device ID */
DeviceID = SPI_FLASH_ReadDeviceID();
HAL_Delay( 200 );
/* 获取 SPI Flash ID */
FlashID = SPI_FLASH_ReadID();
printf("\r\nFlashID is 0x%X, Manufacturer Device ID is 0x%X\r\n", FlashID, DeviceID);
/* 检验 SPI Flash ID */
if (FlashID == sFLASH_ID)
{
printf("\r\n检测到SPI FLASH W25Q128 !\r\n");
/* 擦除将要写入的 SPI FLASH 扇区,FLASH写入前要先擦除 */
SPI_FLASH_SectorErase(FLASH_SectorToErase);
/* 将发送缓冲区的数据写到flash中 */
SPI_FLASH_BufferWrite(Tx_Buffer, FLASH_WriteAddress, BufferSize);
printf("\r\n写入的数据为:\r\n%s", Tx_Buffer);
/* 将刚刚写入的数据读出来放到接收缓冲区中 */
SPI_FLASH_BufferRead(Rx_Buffer, FLASH_ReadAddress, BufferSize);
printf("\r\n读出的数据为:\r\n%s", Rx_Buffer);
/* 检查写入的数据与读出的数据是否相等 */
TransferStatus1 = Buffercmp(Tx_Buffer, Rx_Buffer, BufferSize);
if( PASSED == TransferStatus1 )
{
LED_ALLON;
printf("\r\n16M串行flash(W25Q128)测试成功!\n\r");
}
else
{
LED2_ON;
printf("\r\n16M串行flash(W25Q128)测试失败!\n\r");
}
}// if (FlashID == sFLASH_ID)
else
{
LED2_ON;
printf("\r\n获取不到 W25Q128 ID!\n\r");
}
SPI_Flash_PowerDown();
while (1)
{
}
}
TestStatus Buffercmp(uint8_t* pBuffer1, uint8_t* pBuffer2, uint16_t BufferLength)
{
while(BufferLength--)
{
if(*pBuffer1 != *pBuffer2)
{
return FAILED;
}
pBuffer1++;
pBuffer2++;
}
return PASSED;
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Configure the main internal regulator output voltage
*/
__HAL_RCC_PWR_CLK_ENABLE();
__HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE1);
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLM = 25;
RCC_OscInitStruct.PLL.PLLN = 336;
RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV2;
RCC_OscInitStruct.PLL.PLLQ = 4;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV4;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV2;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_5) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
/************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/ LED和串口UART配置这里就不过多介绍了,感谢大家的阅读!^_^