3D点云模板匹配 PCL例程
Doc 来自PCL官方文档
Doc 来自PCL官方文档
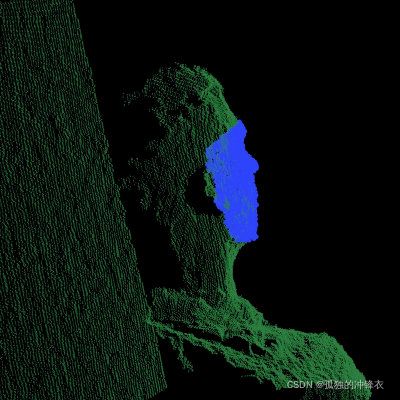
#include 结果查看