论文总结(二)基于模板匹配的目标识别
说明:本文是对上次论文的第四章做以总结。
论文出处:基于视觉引导的机械臂定位抓取研究与实现-刘继宗(知网可查)
目录
1.点云预处理
2. 基于RANSAC和欧式聚类融合算法的平面分割与目标提取
2.1基于RNASAC算法的平面分割
2.2改进的欧式聚类算法的目标分割
3. 基于全局不变特征的目标识别
注:内容均为原论文作者所有,我只是个大自然的搬运工
第四章在进行点云分割时对使用比较普遍的 RANSAC 算法和欧式聚类算法进行研究,并使用改进的欧式聚类算法完成对目标物体的分割,然后建立本地模板库,最后完成对物体的目标识别。
1.点云预处理
深度相机虽然可以获取物体的点云信息,但是红外发射器容易收到外界因素的干扰,常常附有许多不需要的噪点。所以在深度相机获取到点云之后需要对其进 行预处理,通过滤波来消除不需要的噪点。
作者在去除图像噪点的方法是统计分析滤波算法。
统计分析滤波算法的基本原理:
计算输入点云数据中每个点到其临近点的距离分布情况,如果该点的距离分布不满足设 定值,那么这个点在滤波时就会被过滤掉。而基于半径的滤波算法基本原理为在以 设定阈值为半径,某点为球心的球体空间中,如果在个球体空间中存在的其余点的 数量比设定的阈值小,那么在进行滤波处理时这个点会被除去。
例如,如果球体空间中其余点数量的 设定阈值为1时,那么a点就会在滤波时被除去,如果设定阈值为2时,那么a点和c点都将被删除。
如下图所示:

最后利用体素滤波对经过统计分析滤波处理过的点云进行降采样。这种降采样方式可以保证在点云原有几何特征不变的情况下减少点云的数量,加快后续操作的执行速度。

2. 基于RANSAC和欧式聚类融合算法的平面分割与目标提取
2.1基于RNASAC算法的平面分割
RANSAC 算法本质上是由如下两个步骤组成:
1.在输入数据中随机选取一个样本子集,该样本子集要求具有最小数据项并且其基数要小到可以确定模型参数,并且在计算模型参数时只能使用这个样本子集。
2.将第一步中得到的模型参数进行实例化为拟合模型,并与整个数据集中的元素进行对比,如果存在某个元素与这个拟合模型不相符,则该元素被定义为离群点。反之,则定义该元素为内点。

为了方便理解,我画了一个草图(是真的草):

由于 RANSAC 算法仅使用点坐 标拟合平面,没有法线和距离约束,所以仅能处理非常简单的场景。所以用到了下面的方法。
2.2改进的欧式聚类算法的目标分割
基于欧式距离的点云聚类算法的基本原理如下:
还是一样,我又画了一个草图:
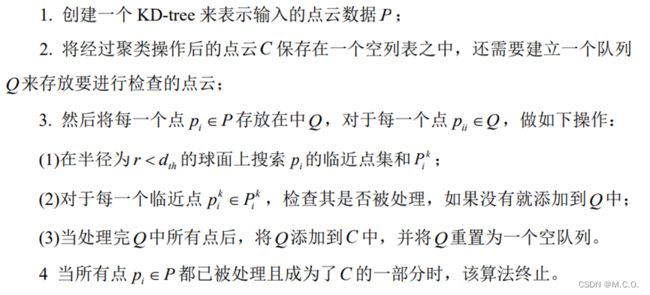
 欧式聚类算法虽然可以对距离进行约束但是无法约束点云法线,为了解决一问题,在欧式聚类算法的基础上添加了法线聚类对该算法进行改进。法线聚类首先建立法线的kd-tree结构,对每个点进行近邻搜索并以其临近点数作为该点密度,以密度最大的点为聚类中心,提取法线角度偏差小于一定阈值的点作为聚类结果。
欧式聚类算法虽然可以对距离进行约束但是无法约束点云法线,为了解决一问题,在欧式聚类算法的基础上添加了法线聚类对该算法进行改进。法线聚类首先建立法线的kd-tree结构,对每个点进行近邻搜索并以其临近点数作为该点密度,以密度最大的点为聚类中心,提取法线角度偏差小于一定阈值的点作为聚类结果。

3. 基于全局不变特征的目标识别
总体来说一个好的点云特征具有以下三个特点:
1. 刚体变换不变性:在估计特征向量时不受点云数据的平移或者旋转的影响;
2. 不同采样密度:在对不同的局部表面进行不同程度的密集采样时,这些局
部表面的特征向量应该相同;
3. 噪声鲁棒性:即使点云数据受到轻微的噪声干扰,点云特征在表示点云时
也必须要具有相同或极度相似的特征向量。
常见的全局特征描述子:
1.点特征直方图PFH[(Point Feature Histogram)
2. 快速点特征直方图 FPFH(Fast Point Feature Histograms)
3. 视点特征直方图 VFH
论文当中采用的是第三种方法,因为这种方法鲁棒性较强。
在进行识别之前需要建立本地模板库。建立本地模板库的方法就是先对同一物体的多个角度采集点云信息,然后计算其VFH并将计算结果pcd文件格式保存在本地硬盘上,紧接着为特征建立kd-tree结构,便于快速检索、查询,这一部分的工作为训练阶段。测试阶段就是将获取的具有识别目标的场景点云分割为大小不同的点云簇,对每一个点云簇计算VFH,最后利用VFH在kd-tee中搜索最相近的匹配。建立好本地模板库后,利用深度相机获取点云信息,识别点云中的目标物并计算其 VFH,然后利用临近搜索算法进行搜索,在模板库中找到与其最相似的点云模板。
这是论文当中截取的邻近搜索匹配结果:
