Golang定时任务框架GoCron源码分析及研究
背景说明
最近工作上有个开发定时任务的需求,调研一下后发现Golang并没有十分完善的定时任务库。
整理我这边的需求如下:
- 支持启动仅定时执行一次的任务;
- 任务在执行之前可以完成撤销;
- 服务重启之后,未完成的定时任务需要允许重新调度;
显然,现成的cron库无法满足我的需求。限定于工期,最终自己实现了一个粗糙的事件驱动定时器。

但这个事件驱动定时器具有以下的缺点:
- 事件订阅/通知机制不成熟
- 无法适用于更灵活的场景,例如多节点的分布式任务调度执行
- 模块之间的职责不清晰,例如其实Timer模块是Scheduler调度器的一部分,Event定时器相关的部分也是Scheduler调度器的一部分,而Executor执行模块也存在任务调度的功能,实际上它只需要负责完成调度器交给它的任务就好
- 没有设计任务调度池,也就是但凡新建计划任务,就会在后台启动一个协程持续监听;一旦任务数量太多,后台停留的协程会越来越多,进程总的消耗就会变得非常夸张,非常可怕
- 任务调度时不存在优先级的概念,假如相同时间内有多个任务同时执行,哪个任务被优先调度完全取决于GMP的系统调度
综上,我需要着重考察现有的Golang任务调度框架,对任务定时器进行重新设计。
GoCron任务调度库
https://github.com/jasonlvhit/gocron
调用实例
package main
import (
"fmt"
"time"
"github.com/jasonlvhit/gocron"
)
func task() {
fmt.Println("I am running task.")
}
func taskWithParams(a int, b string) {
fmt.Println(a, b)
}
func main() {
// Do jobs without params
gocron.Every(1).Second().Do(task)
gocron.Every(2).Seconds().Do(task)
gocron.Every(1).Minute().Do(task)
gocron.Every(2).Minutes().Do(task)
gocron.Every(1).Hour().Do(task)
gocron.Every(2).Hours().Do(task)
gocron.Every(1).Day().Do(task)
gocron.Every(2).Days().Do(task)
gocron.Every(1).Week().Do(task)
gocron.Every(2).Weeks().Do(task)
// Do jobs with params
gocron.Every(1).Second().Do(taskWithParams, 1, "hello")
// Do jobs on specific weekday
gocron.Every(1).Monday().Do(task)
gocron.Every(1).Thursday().Do(task)
// Do a job at a specific time - 'hour:min:sec' - seconds optional
gocron.Every(1).Day().At("10:30").Do(task)
gocron.Every(1).Monday().At("18:30").Do(task)
gocron.Every(1).Tuesday().At("18:30:59").Do(task)
// Begin job immediately upon start
gocron.Every(1).Hour().From(gocron.NextTick()).Do(task)
// Begin job at a specific date/time
t := time.Date(2019, time.November, 10, 15, 0, 0, 0, time.Local)
gocron.Every(1).Hour().From(&t).Do(task)
// NextRun gets the next running time
_, time := gocron.NextRun()
fmt.Println(time)
// Remove a specific job
gocron.Remove(task)
// Clear all scheduled jobs
gocron.Clear()
// Start all the pending jobs
<- gocron.Start()
// also, you can create a new scheduler
// to run two schedulers concurrently
s := gocron.NewScheduler()
s.Every(3).Seconds().Do(task)
<- s.Start()
}
项目分析
这个工具库仅有三个文件:
代码主要分为job和scheduler两个文件,gocron仅放置了回调方法和公共方法。项目整体架构如下:
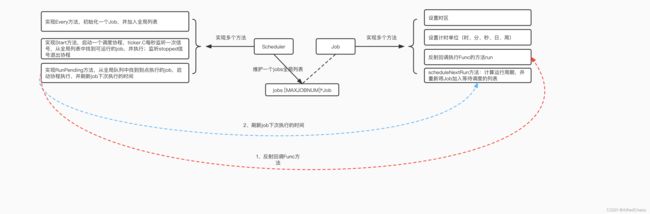
gocron通过scheduler维护一个job列表,指定MAXJOBNUM最大工作队列,限制可执行的工作数大小。
// gocron/scheduler.go
// Scheduler struct, the only data member is the list of jobs.
// - implements the sort.Interface{} for sorting jobs, by the time nextRun
type Scheduler struct {
jobs [MAXJOBNUM]*Job // Array store jobs
size int // Size of jobs which jobs holding.
loc *time.Location // Location to use when scheduling jobs with specified times
}
这里需要更正一下,并不是全局列表,仅仅只是跟随调度器的生命周期。实际上,代码确实存在全局的默认调度器:
var (
defaultScheduler = NewScheduler()
)
因此,可以直接调用。当然也支持实例化自己的调度器:
s := gocron.NewScheduler()
s.Every(3).Seconds().Do(task)
<- s.Start()
gocron是典型的链式调用,scheduler对象通过返回job对象,完成job对象的封装操作之后,加入调度器内部的jobs列表,再通过Start方法启动调度器监控协程,轮询列表中的jobs,一旦找到可执行的任务,就会启动协程运行job的Func对象。
// Job struct keeping information about job
type Job struct {
interval uint64 // pause interval * unit between runs
jobFunc string // the job jobFunc to run, func[jobFunc]
//......
funcs map[string]interface{} // Map for the function task store
fparams map[string][]interface{} // Map for function and params of function
//......
}
funcs维护一个map,缓存funcName到func的映射关系。具体封装在Do方法:
// gocron/job.go
// func (j *Job) Do(jobFun interface{}, params ...interface{}) error
fname := getFunctionName(jobFun)
j.funcs[fname] = jobFun
j.fparams[fname] = params
j.jobFunc = fname
在执行任务时,通过反射回调func:
// gocron/job.go
// func (j *Job) run() ([]reflect.Value, error)
result, err := callJobFuncWithParams(j.funcs[j.jobFunc], j.fparams[j.jobFunc])
if err != nil {
return nil, err
}
// gocron/gocron.go
func callJobFuncWithParams(jobFunc interface{}, params []interface{}) ([]reflect.Value, error) {
f := reflect.ValueOf(jobFunc)
if len(params) != f.Type().NumIn() {
return nil, ErrParamsNotAdapted
}
in := make([]reflect.Value, len(params))
for k, param := range params {
in[k] = reflect.ValueOf(param)
}
return f.Call(in), nil
}
启动调度器时,启动监控协程:
// Start all the pending jobs
// Add seconds ticker
func (s *Scheduler) Start() chan bool {
stopped := make(chan bool, 1)
// ticker每秒产生一个信号
ticker := time.NewTicker(1 * time.Second)
go func() {
for {
// select选择器阻塞
// case接收到信号则执行
// 同时接收到多个信号则随机选择一个执行
select {
// ticker每秒产生一次信号
// RunPending轮询jobs列表,寻找到了时间可执行的任务
case <-ticker.C:
s.RunPending()
// stopped接收到停止信号,退出调度器协程
case <-stopped:
ticker.Stop()
return
}
}
}()
return stopped
}
一个调度器一个协程,通过统一的调度协程去监控调度器任务列表内的任务。
// RunPending runs all the jobs that are scheduled to run.
func (s *Scheduler) RunPending() {
// 轮询jobs列表,找到到时间可执行的任务,创建可执行任务列表
runnableJobs, n := s.getRunnableJobs()
if n != 0 {
for i := 0; i < n; i++ {
// 启动协程运行
go runnableJobs[i].run()
// 刷新job执行信息,等待下一轮调度
runnableJobs[i].lastRun = time.Now()
runnableJobs[i].scheduleNextRun()
}
}
}
综合分析
综上,gocron有如下好处:
- 链式调用简单易用
- scheduler和job职责清晰,项目架构非常容易理解
- 调度器一键启动协程监控,只有到了时间可执行的任务才会被加入到runablejobs列表,大大减少了进程中协程的数量,减少资源消耗
- 调度器维护的待执行任务池,存在预设的容量大小,限定了同时可执行的最大任务数量,不会导致超量
但它的缺陷也同样明显:
- 当不同的线程同时对同一个调度器进行操作,对任务列表产生的影响是不可预知的。因此这个框架下,最好是每个client维护自己的scheduler对象
- 虽然调度器维护一个jobs列表,但如果超过列表设定容量的任务便无法等待执行了……这一点gocron并没有理睬
- 几乎每秒,为了找到可执行的任务去构建runablejobs列表,都会轮询一次任务列表。为了追求结果的一致,它会对jobs进行排序,虽然Golang编译器对内置的sort方法进行了优化,会选举最快的方式对数据进行处理,但依然存在消耗
- 依然是内存操作,服务重启任务列表就不存在了。也没有考虑到多节点的场景。
新的GoCron分析
https://github.com/go-co-op/gocron
原gocron的作者居然住进ICU了,管理员说截止至2020年3月依然无法联系上他。愿他身体安康……gocron被fork后有了新的发展,赶紧扒下来学习一下
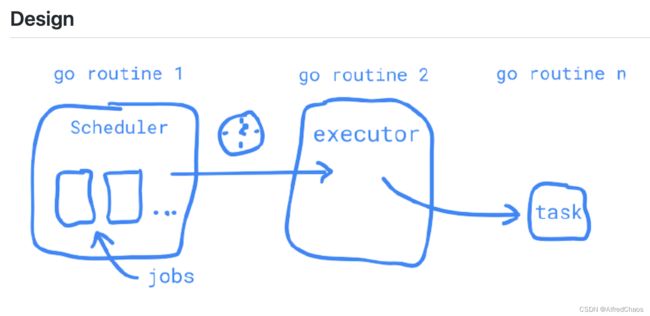
新的gocron新增了很多内容,依然围绕着Scheduler和Job进行链式操作,但新增了executor模块。executor仅负责执行Scheduler调度过来的任务。
项目架构
下面是项目README文档里公开的架构图:
新功能
新版gocron支持了cron格式的语法
// cron expressions supported
s.Cron("*/1 * * * *").Do(task) // every minute
新增了异步和阻塞模式的两种调度方式
// you can start running the scheduler in two different ways:
// starts the scheduler asynchronously
s.StartAsync()
// starts the scheduler and blocks current execution path
s.StartBlocking()
通过设置信号量限制可同时运行的任务数量
// gocron/scheduler.go
// SetMaxConcurrentJobs limits how many jobs can be running at the same time.
// This is useful when running resource intensive jobs and a precise start time is not critical.
func (s *Scheduler) SetMaxConcurrentJobs(n int, mode limitMode) {
// 通过对n的配置修改并发任务数的大小
s.executor.maxRunningJobs = semaphore.NewWeighted(int64(n))
// limitMode即当可执行任务达到最大并发量时,应该如何处理的逻辑
// RescheduleMode:跳过本次执行,等待下一次调度
// WaitMode:持续等待,知道可执行队列空出。但,由于等待的任务数积累,可能导致不可预知的后果,某些任务可能一直等不到执行
s.executor.limitMode = mode
}
// gocron/executor.go
// 通过信号量的方式从最大数量中取一位
// 若通过,下一步可以执行函数
if e.maxRunningJobs != nil {
if !e.maxRunningJobs.TryAcquire(1) {
switch e.limitMode {
case RescheduleMode:
return
case WaitMode:
select {
case <-stopCtx.Done():
return
case <-f.ctx.Done():
return
default:
}
if err := e.maxRunningJobs.Acquire(f.ctx, 1); err != nil {
break
}
}
}
defer e.maxRunningJobs.Release(1)
}
gocron支持指定Job以单例模式运行。通过siglefilght工具库保证当前仅有一个可运行的Job
// gocron/job.go
// SingletonMode prevents a new job from starting if the prior job has not yet
// completed it's run
// Note: If a job is added to a running scheduler and this method is then used
// you may see the job run overrun itself as job is scheduled immediately
// by default upon being added to the scheduler. It is recommended to use the
// SingletonMode() func on the scheduler chain when scheduling the job.
func (j *Job) SingletonMode() {
j.mu.Lock()
defer j.mu.Unlock()
j.runConfig.mode = singletonMode
j.jobFunction.limiter = &singleflight.Group{}
}
// gocron/executor.go
switch f.runConfig.mode {
case defaultMode:
runJob()
case singletonMode:
// limiter是singlefilght对象,Do方法内仅会执行一次,保证一次只运行一个任务
_, _, _ = f.limiter.Do("main", func() (interface{}, error) {
select {
case <-stopCtx.Done():
return nil, nil
case <-f.ctx.Done():
return nil, nil
default:
}
runJob()
return nil, nil
})
}
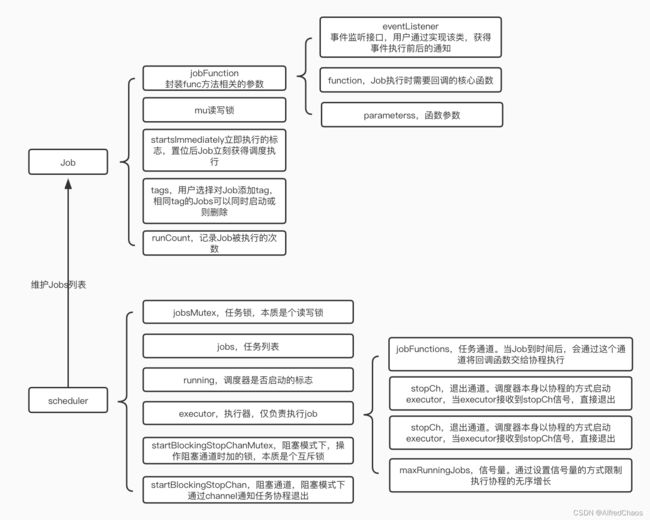
gocron主要数据结构
主要分为schduler调度器,job任务,以及executor执行器对象
追踪一下调用链的工作流程:
- 初始化一个Scheduler;新版gocron似乎更鼓励用户使用自己的scheduler,而不是如同老版一样维护一个默认的全局调度器
func NewScheduler(loc *time.Location) *Scheduler {
// 这时已经将executor同步初始化完毕
// scheduler和executor是一对一的关系
executor := newExecutor()
return &Scheduler{
jobs: make([]*Job, 0),
location: loc,
running: false,
time: &trueTime{},
executor: &executor,
tagsUnique: false,
timer: afterFunc,
}
}
- Every方法初始化一个Job,如果scheduler已经启动,即任务列表中已经存在一个等待封装的Job,那么直接取出相应的Job
if s.updateJob || s.jobCreated {
job = s.getCurrentJob()
}
接下来确定Job的运行周期,并加入到任务列表
s.setJobs(append(s.Jobs(), job))
Every方法返回了新增Job的scheduler,此时scheduler的任务队列中存在一个Job就绪,等待下一步调度。
- Do方法带着回调的函数和对应的参数开始执行,它从当前的scheduler中取出一个就绪的Job,进行最后的判断,如果Job不合格,那么将它从任务队列中移除,并返回报错
if job.error != nil {
// delete the job from the scheduler as this job
// cannot be executed
s.RemoveByReference(job)
return nil, job.error
}
// 还有很多判断条件,这里不一一列举
将Do方法将要执行的函数封装进Job。接下来判断schduler是否启动:如之前gocron一样,scheduler也是通过协程监听并执行启动任务协程的工作。
之前的scheduler,默认启动一个ticker,每秒去排序并轮询任务队列,从中取出满足条件的任务开始执行,效率非常低。而现在的改进是:scheduler启动监听协程后;不是以轮询而是以通知的方式,从channel中获取Job的Function,再启动协程去执行。
在这样的前提下,scheduler监听协程什么时候启动是位置的。此处添加一个判断,当scheduler启动时,同时启动runContinuous去完成Job的最后一步操作。若是scheduler没有启动,那么直接返回,等待scheduler启动后再完成操作。
// we should not schedule if not running since we can't foresee how long it will take for the scheduler to start
if s.IsRunning() {
s.runContinuous(job)
}
通过这样的设计,在最终启动scheduler前后,都可以以动态的方式添加/移除任务。
- scheduler提供了两种启动schduler的模式:异步和阻塞(也就是同步啦)
// StartAsync starts all jobs without blocking the current thread
func (s *Scheduler) StartAsync() {
if !s.IsRunning() {
s.start()
}
}
// StartBlocking starts all jobs and blocks the current thread.
// This blocking method can be stopped with Stop() from a separate goroutine.
func (s *Scheduler) StartBlocking() {
s.StartAsync()
s.startBlockingStopChanMutex.Lock()
s.startBlockingStopChan = make(chan struct{}, 1)
s.startBlockingStopChanMutex.Unlock()
<-s.startBlockingStopChan
}
一般情况下,我们通过异步模式,启动对所有任务的监控
// start starts the scheduler, scheduling and running jobs
func (s *Scheduler) start() {
// 启动监听协程,select选择器配合channel阻塞
// 直到Job准备执行发送通知
go s.executor.start()
// 将scheduler置位为running
s.setRunning(true)
// 遍历所有任务,以递归的方式监控起来
s.runJobs(s.Jobs())
}
比较有意思的是这个部分:
func (s *Scheduler) runJobs(jobs []*Job) {
for _, job := range jobs {
// 这个函数是一个递归调用
// 这里对所有Job都以递归的方式监听着
s.runContinuous(job)
}
}
// 这是runContinuous的部分代码
job.setTimer(s.timer(nextRun, func() {
if !next.dateTime.IsZero() {
for {
n := s.now().UnixNano() - next.dateTime.UnixNano()
// 某个任务满足执行条件了,退出循环
if n >= 0 {
break
}
s.time.Sleep(time.Duration(n))
}
}
// 递归执行本方法
// runContinuous会判断当前Job是否可执行
// 若不则退出,若可以则将Job设置为立即执行,并刷新执行时间
// 若Job“立即执行”的标志已经置位,直接调用run发送通知给监听协程
s.runContinuous(job)
}))
这样的设计太优雅了,大佬们的奇思妙想啊~
- 最后是executor的执行,前面已经提到过。通过select接收channel通知的形式执行下去,核心方法是这个:
runJob := func() {
f.incrementRunState()
callJobFunc(f.eventListeners.onBeforeJobExecution)
callJobFuncWithParams(f.function, f.parameters)
callJobFunc(f.eventListeners.onAfterJobExecution)
f.decrementRunState()
}
eventListeners封装了两个接口,用以在执行任务和完成任务后发送给用户事件通知。
综合分析
gocron进行了不少方面的优化:
- 在任务列表的维护上,可加入调度的任务数不再限定为某个值,而是以切片的方式自动增长。但最终能够并行执行的任务数却通过信号量多方式加以控制;
- 不再周期性地轮询任务列表,以期待获得可运行的任务;而是通过更巧妙的方式,任务递归监听,一旦发现可执行的任务,就自行通知scheduler,完成调度;
- 具备更丰富的语法和模式,用户可以根据场景自行选择;调度器同时支持异步及同步调用,而Job也支持周期性轮询和单点任务;
- scheduler内加锁了,对Jobs列表的操作都会加上读写锁,一些其它的参数也拥有自己的锁。这使得scheduler具备线程安全性,但某种程度上影响了对Jobs队列的操作。考虑到gocron不再鼓励使用全局Scheduler,而是每个client维护自己的Scheduler,那么被锁影响的场景会进一步减少,与最终优化获得的性能提升相比,都是值得的。
最后
最后的最后,gocron依然无法满足我当前的需求,但已经不妨碍我对源码进行下一步的改造:
- 我需要对Job进行上层的封装,并将要调用的方法和参数序列化后存入数据库,直到服务重启时,能够找到未完成的任务加载进scheduler重新执行
- 我的计划任务只需要执行一次,而无须重复执行,这一点已经有SingletonMode保证
- 我需要改造gocron,让它能够支持在某个时间范围内调度任务