《复杂约束下的多目标优化算法》阅读笔记
摘要:约束多目标优化问题(CMOP)由于需要同时考虑目标和约束,特别是当约束极其复杂时,处理起来比较困难。最近的一些算法在处理具有简单可行域的CMOP时工作得很好,然而,对于具有复杂可行域的CMOP,大多数算法的有效性显著降低。针对这一问题,本文提出了一种多阶段进化算法,在进化的不同阶段逐一添加约束,并对约束进行处理。具体地说,该算法在初始阶段只考虑了少量的约束条件,可以使种群高效地收敛到具有良好多样性的潜在可行域。随着算法进入后期阶段,在前一阶段获得的解的基础上,考虑更多的约束条件来搜索最优解。此外,还提出了一种根据对无约束Pareto前沿的影响对约束处理优先级进行排序的策略,从而加快了算法的收敛速度。在五个基准测试套件和三个实际应用上的实验结果表明,该算法在处理复杂约束的多目标进化算法时,尤其是在处理复杂约束的问题时,性能优于几种最新的约束多目标进化算法。
文章目录
- 1 Introduction
- 2 Related works and motivation
-
- 2.1 现有的CMOEAs
- 2.2 写作动机
- 3 The proposed algorithm
-
- 3.1 MSCMO的概述
- 3.2 算法中的关键技术
- 3.3 对MSCMO的分析
- 4 Experimental study
- 5 Conclusion
- References
1 Introduction
CMOP(Constrained multi-objective optimization problems)可以被描述为:
M i n i m i z e F ( x ) = ( f 1 ( x ) , . . . , f m ( x ) ) ) s u b j e c t t o x ∈ Ω g i ( x ) ≤ 0 , i = 1 , . . . , p h j ( x ) = 0 , j = 1 , . . . , q \begin{aligned} Minimize\ \ &\mathbf{F}(\mathbf{x})=(f_1(\mathbf{x}),...,f_m(\mathbf{x}))) \\ subject\ \ to \ \ &\mathbf{x}\in \Omega \\ &g_i(\mathbf{x})\le0,i=1,...,p \\ &h_j(\mathbf{x})=0,j=1,...,q \end{aligned} Minimize subject to F(x)=(f1(x),...,fm(x)))x∈Ωgi(x)≤0,i=1,...,phj(x)=0,j=1,...,q解的约束违反程度为:
C ( x ) = ∑ k = 1 p max { 0 , g k ( x ) } + ∑ ℓ = 1 q ∣ h ℓ ( x ) ∣ C(\mathbf{x})=\sum_{k=1}^p{\max \left\{ 0,g_k\left( \mathbf{x} \right) \right\}}+\sum_{\ell =1}^q{\left| h_{\ell}\left( \mathbf{x} \right) \right|} C(x)=k=1∑pmax{0,gk(x)}+ℓ=1∑q∣hℓ(x)∣若解 x \mathbf{x} x可行,则 C ( x ) = 0 C(\mathbf{x})=0 C(x)=0。
截至目前,解决多目标优化问题的多目标进化算法(MOEAs)主要分为四类:1)基于帕累托支配的进化算法:NSGA-II[11]、SPEA2[50];2)基于分解的进化算法:MOEA/D[46]、MOEA/D-AWA[34];3)基于指标的进化算法:IBEA[49]、AR-MOEA[36];4)混合型进化算法:SRA[24]、Two-Arch[40]。近年来有约束的多目标优化问题(CMOP)逐渐吸引了研究学者的注意,于是一系列求解这类问题的进化算法也被相继提出(CMOEAs),例如基于有约束的帕累托支配的NSGA-II-CDP[11];基于两档案策略的C-TAEA[25];以及基于两阶段搜索的ToP[27]。尽管这些方法在解决有约束多目标优化问题时表现都很不错,但是在一些特殊复杂的约束条件下,比如:离散的可行域和很大的不可行域屏障结合,或仅有狭窄的可行域等情况,并不一定能找到最优解。因此我们提出,如果能够将约束条件分阶段加入求解过程,应该可以使求解更加简单。
遵循这一思想,本文提出了一种求解CMOP问题的多阶段进化算法。该算法将约束处理过程分成多个阶段,逐个阶段地处理约束,而不是将所有约束作为一个整体来处理。这项工作的主要贡献概括如下:
1)提出了一种求解复杂约束条件下CMOP问题的多阶段CMOEA(MSCMO)算法。在该算法中,约束是逐个添加的,并在不同的进化阶段进行处理。在初始阶段,该算法只需处理少量的约束条件,能使种群高效地收敛到具有良好多样性的潜在可行域。对于每个阶段,考虑了更多的约束,并且可以基于在前几个阶段获得的解更容易地处理这些约束。
2)提出了一种根据对无约束Pareto前沿的影响对约束处理优先级进行排序的策略,用于确定每个阶段需要处理的约束。在基准CMOP上的实验结果表明,提出的约束处理优先级可以加快算法的收敛速度。
3)在基准CMOP和实际应用上的一系列实验结果表明,我们的算法与现有CMOEAS相比具有很强的竞争力,特别是在具有复杂约束的CMOP上。
2 Related works and motivation
2.1 现有的CMOEAs
一般来说,现有的CMOEA根据它们采用的约束处理技术可以分为四类。
第一类是惩罚函数法。其主要思想是根据个体违反约束的程度来构造惩罚项,通过在目标函数中加入惩罚项,构造了惩罚适应度函数 f i t n e s s ( x ) fitness(\mathbf{x}) fitness(x)。然后,用 f i t n e s s ( x ) fitness(\mathbf{x}) fitness(x)来评价个体。惩罚函数方法可分为:死刑函数[30]、静态惩罚函数[18]、动态惩罚函数[15]和自适应惩罚函数[26,35,19]。其中,自适应惩罚函数具有更好的性能,因为它可以利用搜索过程中的反馈信息来动态调整参数。文[26]将惩罚函数与粗糙集理论相结合,根据个体违反约束的情况自适应调整惩罚系数。文献[35]提出了一种新的基于模糊规则的罚函数方法,用于求解约束优化问题,该问题使用模糊推理系统自适应地确定罚函数的值。文[19]将偏好转化为进化多目标优化的约束条件,并采用基于罚函数法的约束支配原则处理约束条件。
第二类是将目标和约束分开。具体地说,这一类可以分为三类:可行性规则、随机排序法和 ϵ \epsilon ϵ-约束方法。对于可行性准则,可行解优于不可行解。Deb在[7]中提出的可行性规则CDP是最流行的约束处理技术之一,在以下三个条件下,一个解 x \mathbf{x} x被认为优于另一个解 y \mathbf{y} y:
1. x \mathbf{x} x可行而 y \mathbf{y} y不可行;
2. x \mathbf{x} x和 y \mathbf{y} y都可行,但 x \mathbf{x} x的目标函数值由于 y \mathbf{y} y;
3. x \mathbf{x} x和 y \mathbf{y} y都不可行,但是 x \mathbf{x} x的约束违反程度低于 y \mathbf{y} y。
在[29]中,每个解的一个新的适应度函数被定义为两种排序的加权和:一种是基于CDP的解的排序,另一种是基于Pareto支配的解的排序。在[45]中,随机排序方法中的概率参数Pf可以随着种群在差异进化(DE)框架下的演化而动态变化。 ϵ \epsilon ϵ-约束方法提供了对不可行解的松弛。对于约束违约度小于 ϵ \epsilon ϵ-的个体,其解被认为是可行的。反之,对于违反约束程度大于 ϵ \epsilon ϵ-的个体,则认为解是不可行的。 ϵ \epsilon ϵ-Constraint方法的关键是 ϵ \epsilon ϵ的值。已经设置好了。在[12]中,算法根据当前种群中可行解占总解数的比例动态调整 ϵ \epsilon ϵ的取值,适用于不可行域较大的CMOP。在文[23]中,通过设置不同的 ϵ \epsilon ϵ在不同时间取值,以平衡收敛性、多样性和可行性。在[48]中,如果种群的可行比例小于阈值 α \alpha α,则 ϵ \epsilon ϵ的值逐渐减小,否则将其设置为种群个体间的最大约束违反程度,并提出了一种检测和逃逸策略,帮助种群摆脱局部最优。
第三类是多对象化方法。其思想是将约束视为附加目标,将约束优化问题转化为多目标优化问题。文献[2]提出了一种可行比控制技术,并将其与多目标方法相结合,使搜索可行域与不可行域达到了较好的平衡。在[47]中,提出了一个三目标进化框架,该框架设计了收敛、多样性和解决约束多目标问题的可行性三个指标。
最后一类是杂交法。该方法结合了多种不同的约束处理技术来处理约束问题。在[42]中,提出了一种自适应权衡模型,将种群演化过程分为三种情况,即种群中只有可行解、种群中只有不可行解、种群中既有可行解又有不可行解。在[42]中,针对不同的进化情况设计了不同的个体比较和选择标准。在[22]中,针对环境选择问题设计了一种新型的选择进化策略。首先,从整个父代和子代种群中剔除违反约束较大的个体,并选择所有非劣势个体来获得下一代。然后,如果非劣势个体的数量小于种群规模,则使用惩罚函数方法来选择剩余的个体。
近年来,也发展了一些多阶段或多种群的CMOEA来解决CMOP问题。在文[31]中,提出了一个求解带有欺骗约束的CMOP问题的两阶段协同进化框架。第一阶段采用两个子群:一个用于探索可行区域,另一个用于探索整个空间。第二阶段以这两个子种群为初始种群,寻找Pareto最优解。这两个阶段可以根据进化过程中发现的信息进行切换。在[14]中,提出的PPS框架将搜索过程分为两个不同的阶段:推和拉搜索阶段。在推的阶段,采用多目标进化算法搜索搜索空间,不考虑任何约束条件,快速穿越不可行域,逼近无约束的Pareto前沿。在拉的阶段,考虑了这些约束条件,以帮助种群回到真正的帕累托前沿。在[27]中,还提出了一个称为ToP的两阶段框架。首先,第一阶段只考虑单目标和所有约束,从而将原始的CMOP问题转化为有约束的单目标优化问题来寻找最有希望的可行域。然后,在第二阶段,考虑所有的约束和目标,以获得最终的解。在[39]中,提出了一种两阶段进化算法,在进化过程中调整适应度评估策略,以自适应地平衡目标优化和约束满足。在第一阶段,目标对到达所有可行域的约束给予相同的优先级。在第二阶段,目标优先于沿着可行边界使解决方案多样化的约束条件。在[41]中,提出了一种用于约束多目标优化的协作DE框架CCMODE,该框架包括用于约束单目标优化的M个子种群和用于约束M目标优化的档案种群。在文献[25]中,提出了一种求解约束多目标优化问题的两档进化算法C-TAEA。面向收敛的档案(CA)旨在优化约束和目标,旨在将种群推向帕累托前沿,而面向多样性的档案(DA)则进化为优化目标,旨在探索CA未充分开发的区域,包括不可行的区域。CCMO[38]也是一种进化算法,它进化两个种群。该框架通过进化一个种群来解决原CMOP问题,以保持可行性和收敛,同时进化另一个种群来解决由原问题衍生的辅助问题,以保持多样性。
2.2 写作动机
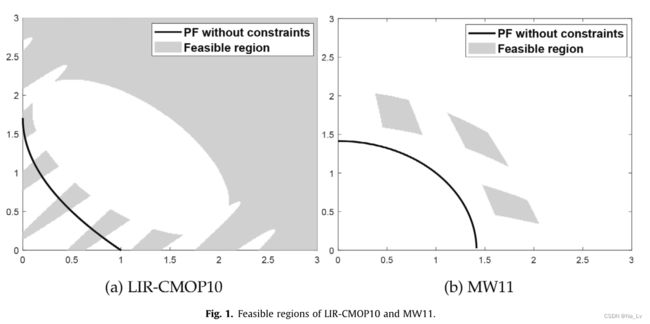
尽管已有许多约束多目标进化算法被用于求解CMOP问题,并取得了很好的效果,但大多数算法在处理复杂约束的CMOP问题时面临困难。通常,现有的大多数约束优化问题都有多个约束[27,12],这些不同的约束协同形成一个复杂的约束景观。例如,可行区域可以是狭窄和离散的,也可以是巨大的不可行障碍。
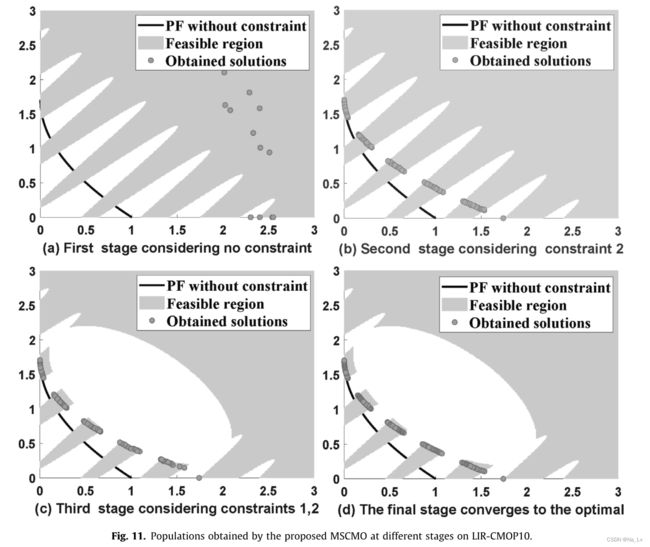
基于已有算法的对比,我们有两个重要的观察结果:首先,一个狭窄的可行域会给寻找可行方案带来困难。其次,离散的可行域会导致局部最优。但是,如果单独处理前面提到的复杂约束,它们就不再被认为是复杂的。基于这种思想,本文逐一考虑约束条件,将求解CMOP问题的过程分成多个阶段。具体而言,该算法从只处理一个约束开始,然后在每个阶段逐步考虑更多的约束。这样,就可以很容易地解决原来复杂的CMOPS问题。在下一节中,将描述拟议的MSCMO的程序。
3 The proposed algorithm
3.1 MSCMO的概述
总流程伪代码:
输入: n n n(种群大小)、 λ \lambda λ(阶段变换的阈值参数)、 A r c h i v e Archive Archive(储存解的外部档案)
输出: P P P(最终种群)
首先,决定约束条件的优先顺序:
C H P = C o n s t r a i n t _ P r i o r i t y _ D e t e r m i n a t e ( n , λ ) CHP = Constraint\_Priority\_Determinate(n,\lambda) CHP=Constraint_Priority_Determinate(n,λ)
种群初始化:
最初种群记为 P P P;
当前阶段的约束条件记为 c u r r e n t C o n s t r a i n t currentConstraint currentConstraint;
种群的适应度为: F F F(这里及以下所有适应度的计算方法采用SPEA2中的方法)
开始循环直至达到最大迭代次数:
繁殖
基于适应度用二进制锦标赛的方法从 P P P中选出 n n n个亲代记为 P ′ P' P′
由亲代产生的子代记为 O f f s p r i n g Offspring Offspring
O f f s p r i n g Offspring Offspring与 P P P共同组成新的 P P P
更新外部档案
如果 ∣ c u r r e n t C o n s t r a i n t ∣ > 0 \left|currentConstraint\right|>0 ∣currentConstraint∣>0,则
从 O f f s p r i n g ∪ A r c h i v e Offspring\cup Archive Offspring∪Archive中选择满足约束条件的非支配解储存到 A r c h i v e Archive Archive中
环境选择
计算此时种群 P P P的适应度 F F F。
根据适应度利用截断方法从 P P P中选择 n n n个解记为 P P P。
决定是否进入下一阶段
若 ∣ c u r r e n t C o n s t r a i n t ∣ = 0 \left|currentConstraint\right|=0 ∣currentConstraint∣=0(说明当前是第一阶段)
种群在最高优先级的约束条件下不可行解的比例记为 i f r ifr ifr
若 i f r > 0 ifr>0 ifr>0
则进入下一阶段:加入下一优先级(最高优先级)的约束条件并重新计算种群适应度
否则 ∣ c u r r e n t C o n s t r a i n t ∣ > 0 \left|currentConstraint\right|>0 ∣currentConstraint∣>0(不是第一阶段)
计算种群在每个目标函数上的均值改变量,并记最大值为 m a x C h a n g e maxChange maxChange
若 m a x C h a n g e ≤ λ maxChange\le\lambda maxChange≤λ
则进入下一阶段:加入下一优先级的约束条件并且重新计算种群的适应度
构建下一阶段的初始种群
若 ∣ A r c h i v e ∣ = n \left|Archive\right|=n ∣Archive∣=n,则 A r c h i v e = P Archive=P Archive=P;
若 ∣ A r c h i v e ∣ > n \left|Archive\right|>n ∣Archive∣>n,则参照SPEA2中的截断方法;
若 ∣ A r c h i v e ∣ < n \left|Archive\right|
输出最终的种群 P P P
C o n s t r a i n t _ P r i o r i t y _ D e t e r m i n a t e Constraint\_Priority\_Determinate Constraint_Priority_Determinate伪代码
输入: n n n(种群大小)、 λ \lambda λ(阶段变换的阈值参数)
输出: C H P CHP CHP
随机初始化的种群记为 P 1 P_1 P1
根据 P 1 P_1 P1可以得到对约束条件优先级的排序 C H P CHP CHP
计算 P 1 P_1 P1中个体对应的适应度 F 1 F_1 F1
以下循环直至达到最大迭代次数
使用二进制锦标赛方法1根据适应度从 P 1 P_1 P1中选择 n n n个亲代组成 P 1 ′ P'_1 P1′
P 1 P_1 P1与 P 1 ′ P'_1 P1′的子代重新组成 P 1 P_1 P1
重新计算 P 1 P_1 P1的适应度 F 1 F_1 F1
用截断法从 P 1 P_1 P1中选出 n n n个解组成 P 1 P_1 P1
计算种群在每个目标函数上改变量,并记最大值为 m a x C h a n g e maxChange maxChange
若 m a x C h a n g e ≤ λ maxChange\le\lambda maxChange≤λ
计算种群在每个约束条件下的不可行率为 i f r ifr ifr
将不可行率按降序排列,将对应的约束条件排序储存到 C H P CHP CHP中
输出 C H P CHP CHP
3.2 算法中的关键技术
在这一小节中,我们介绍了所提出的多阶段约束处理技术中的三个关键部分:每个阶段的种群重新初始化,每个阶段的适应度评估,以及从当前阶段到下一阶段的转换条件。
每阶段的种群初始化 需要注意在多阶段进化算法中,每个阶段都要借助之前储存在外部档案中的解重新初始化种群。若 ∣ A r c h i v e ∣ = n \left|Archive\right|=n ∣Archive∣=n,则 A r c h i v e = P Archive=P Archive=P;若 ∣ A r c h i v e ∣ > n \left|Archive\right|>n ∣Archive∣>n,则参照SPEA2中的截断方法2;若 ∣ A r c h i v e ∣ < n \left|Archive\right|
每阶段的适应度计算 使用SPEA2中适应度的计算方法。此外,为了使算法达到更好的性能,我们在不同的阶段使用了不同的约束处理机制。具体地说,在进化的早期阶段,使用基于多目标优化的约束处理机制来处理约束,以获得具有良好多样性的解,其中将当前阶段的约束违反程度作为额外的目标函数,并使用SPEA2中的方法来计算适应值。在最后阶段,综合考虑所有约束条件,采用了基于可行性规则的约束处理机制来加速收敛。
当前阶段转换为下一阶段的条件 如果是第一阶段,则只需要判断当前约束下解集的不可行率大于零,即可进入下一阶段,在后续阶段更新过程中,需要判断种群在每个目标上的变化平均值小于给定的阈值 λ \lambda λ时(本文中取 λ = 0.01 \lambda=0.01 λ=0.01),才能进入下一阶段。第 i i i个目标函数上的变化平均值计算方式如下:
f i ′ ( x ) = f i ( x ) − f i min f i max − f i min f i ′ ‾ = ∑ x ∈ P f i ′ ( x ) ∣ P ∣ \begin{aligned} &f'_i\left( \mathbf{x} \right) =\frac{f_i\left( \mathbf{x} \right) -f_{i}^{\min}}{f_{i}^{\max}-f_{i}^{\min}} \\ &\overline{f'_i}=\frac{\sum_{\mathbf{x}\in P}{f'_i\left( \mathbf{x} \right)}}{\left| P \right|} \end{aligned} fi′(x)=fimax−fiminfi(x)−fiminfi′=∣P∣∑x∈Pfi′(x)这里 f i max f_{i}^{\max} fimax、 f i min f_{i}^{\min} fimin表示种群中关于第 i i i个目标函数的最大值和最小值。
3.3 对MSCMO的分析

4 Experimental study
5 Conclusion
本文提出了一种求解具有相对复杂可行域的CMOPS的多阶段CMOEA算法。具体地说,在该算法中,约束是逐个添加的,并在不同的进化阶段进行处理。在算法的早期阶段,只考虑了少量的约束条件,使种群高效地收敛到具有良好多样性的潜在可行域。当算法进入下一阶段时,考虑了更多的约束条件,并通过使用前一阶段的解来保持种群的多样性。这样,原来复杂的问题就迎刃而解了。此外,我们还对约束进行排序和组合,以提高搜索可行解的效率和收敛速度。在实验部分,将提出的算法与几种最先进的CMOEA算法在五个基准测试套件和三个真实应用程序上进行了比较。结果表明,我们提出的算法具有很强的竞争力,特别是对于具有复杂约束的CMOP。
由于该算法具有很强的灵活性和易于实现的特点,因此该算法也适用于求解其他类型的可行域较复杂的CMOP问题。此外,为约束设计更有效的排序和组合策略,以进一步提高效率和效果也是有趣的。例如,我们可以对约束类型进行分类,并一起处理相同类型的约束。
References
[2] R. Jiao, S. Zeng, C. Li, A feasible-ratio control technique for constrained optimization, Information Sciences 502 (2019) 201–217.
[7] K. Deb, An efficient constraint handling method for genetic algorithms, Computer Methods in Applied Mechanics and Engineering 186 (2000) 311–338.
[11] K. Deb, A. Pratap, S. Agarwal, T. Meyarivan, A fast and elitist multiobjective genetic algorithm: NSGA-II, IEEE Transactions on Evolutionary Computation 6 (2002) 182–197.
[12] Z. Fan, W. Li, X. Cai, H. Huang, Y. Fang, Y. You, J. Mo, C. Wei, E.D. Goodman, An improved epsilon constraint-handling method in moea/d for cmops with large infeasible regions, Soft Computing 23 (2019) 12491–12510…
[14] Z. Fan, W. Li, X. Cai, H. Li, C. Wei, Q. Zhang, K. Deb, E.D. Goodman, Push and pull search for solving constrained multi-objective optimization problems, Swarm and Evolutionary Computation 44 (2019) 665–679.
[15] R. Farmani, J.A. Wright, Self-adaptivefitness formulation for constrained optimization, IEEE Transactions on Evolutionary Computation 7 (2003) 445– 455, https://doi.org/10.1109/TEVC.2003.817236.
[18] A. Homaifar, C. Qi, H.Y. Lai, Constrained optimization via genetic algorithms, Transactions of The Society for Modeling and Simulation International -SIMULATION 62 (1994) 242–253, https://doi.org/10.1177/003754979406200405.
[19] Z. Hou, C. He, R. Cheng, Reformulating preferences into constraints for evolutionary multi- and many-objective optimization, Information Sciences 541 (2020) 1–15…
[22] L. Jiao, L. Li, R. Shang, F. Liu, R. Stolkin, A novel selection evolutionary strategy for constrained optimization, Information Sciences 239 (2013) 122–141.
[23] R. Jiao, S. Zeng, C. Li, S. Yang, Y.S. Ong, Handling constrained many-objective optimization problems via problem transformation, IEEE Transactions on Cybernetics (2020) 1–14, https://doi.org/10.1109/TCYB.2020.3031642.
[24] B. Li, K. Tang, J. Li, X. Yao, Stochastic ranking algorithm for many-objective optimization based on multiple indicators, IEEE Transactions on Evolutionary Computation 20 (2016) 924–938.
[25] K. Li, R. Chen, G. Fu, X. Yao, Two-archive evolutionary algorithm for constrained multi-objective optimization, IEEE Transactions on Evolutionary Computation 23 (2018) 303–315.
[26] Chih-Hao Lin, A rough penalty genetic algorithm for constrained optimization, Information Sciences 241 (2013) 119–137.
[30] J.R. McDonnell, R.G. Reynolds, D.B. Fogel, A Survey of Constraint Handling Techniques in Evolutionary Computation Methods, MIT Press, 1995.
[31] C. Peng, H. Liu, E.D. Goodman, A cooperative evolutionary framework based on an improved version of directed weight vectors for constrained multiobjective optimization with deceptive constraints, IEEE Transactions on Cybernetics (2020) 1–13.
[34] Y. Qi, X. Ma, F. Liu, L. Jiao, J. Sun, J. Wu, MOEA/D with adaptive weight adjustment, Evolutionary Computation 22 (2014) 231–264.
[35] C. Saha, S. Das, K. Pal, S. Mukherjee, A fuzzy rule-based penalty function approach for constrained evolutionary optimization, IEEE Transactions on Cybernetics 46 (2016) 2953–2965, https://doi.org/10.1109/TCYB.2014.2359985.
[36] Y. Tian, R. Cheng, X. Zhang, F. Cheng, Y. Jin, An indicator-based multiobjective evolutionary algorithm with reference point adaptation for better versatility, IEEE Transactions on Evolutionary Computation 22 (2018) 609–622.
[37] Y. Tian, R. Cheng, X. Zhang, Y. Jin, PlatEMO: A MATLAB platform for evolutionary multi-objective optimization [educational forum], IEEE Computational Intelligence Magazine 12 (2017) 73–87, https://doi.org/10.1109/MCI.2017.2742868.
[38] Y. Tian, T. Zhang, J. Xiao, X. Zhang, Y. Jin, A coevolutionary framework for constrained multi-objective optimization problems, IEEE Transactions on Evolutionary Computation (2020) 1, https://doi.org/10.1109/TEVC.2020.3004012.
[39] Y. Tian, Y. Zhang, Y. Su, X. Zhang, K. Tan, Y. Jin, Balancing objective optimization and constraint satisfaction in constrained evolutionary multi-objective optimization, IEEE Transactions on Cybernetics (2020), https://doi.org/10.1109/TCYB.2020.3021138.
[41] J. Wang, G. Liang, J. Zhang, Cooperative differential evolution framework for constrained multiobjective optimization, IEEE Transactions on Cybernetics 49 (2019) 2060–2072, https://doi.org/10.1109/TCYB.2018.2819208.
[42] Y. Wang, Z. Cai, Y. Zhou, W. Zeng, An adaptive tradeoff model for constrained evolutionary optimization, IEEE Transactions on Evolutionary Computation 12 (2008) 80–92.
[45] M. Zhang, W. Luo, X. Wang, Differential evolution with dynamic stochastic selection for constrained optimization, Information Sciences 178 (2008) 3043–3074.
[46] Q. Zhang, H. Li, MOEA/D: A multiobjective evolutionary algorithm based on decomposition, IEEE Transactions on Evolutionary Computation 11 (2007) 712–731.
[47] Y. Zhou, M. Zhu, J. Wang, Z. Zhang, Y. Xiang, J. Zhang, Tri-goal evolution framework for constrained many-objective optimization, IEEE Transactions on Systems, Man, and Cybernetics: Systems 50 (2020) 3086–3099, https://doi.org/10.1109/TSMC.2018.2858843.
[48] Q. Zhu, Q. Zhang, Q. Lin, A constrained multiobjective evolutionary algorithm with detect-and-escape strategy, IEEE Transactions on Evolutionary Computation (2020) 1.
[49] E. Zitzler, S. Kunzli, Indicator-based selection in multiobjective, search (2004) 832–842…
[50] E. Zitzler, M. Laumanns, L. Thiele, SPEA2: Improving the strength Pareto evolutionary algorithm for multiobjective optimization, in: Proceedings of the
Fifth Conference on Evolutionary Methods for Design, Optimization and Control with Applications to Industrial Problems, 2001, pp. 95–100.
二进制锦标赛方法:每次从种群中任选2个个体竞争,选择获胜者,重复 n n n次即可得到 n n n个parents。 ↩︎
见跳转链接后绿色字体。 ↩︎