力引导算法深入理解及其在d3.js中实现的源码分析
中学时最喜欢的学科是物理,大学误打误撞读了计算机。最近在做图计算的相关工作,图的可视化中有一个非常重要的算法:“力引导算法”,这个算法的原理居然就是最简单的粒子间的作用力,真是没想到我喜爱的两个东西在这里结合起来了,也有一个感慨:虽然我们的抽象理论已经这么发达的今天,仍然还是需要这种模拟物理世界的“蛮力”算法。
进入正题,我将按如下顺序带着疑问的由浅入深的讲解一下力引导算法(force-directed),作为自己工作的总结,如果有幸帮助到别人就完美了。
- 力引导算法解决了什么问题?
- 力引导算法的原理是什么?
- 力引导算法有哪里优点及缺点?
- 力引导算法在d3.js中怎么用?
- 力引导算法在d3.js是怎么实现的?
力引导算法解决了什么问题?
一句话:它很大程度上解决了非常困难的图的布局问题,看下面两张图,你觉得哪一张更清晰,实际上它们是一样的图
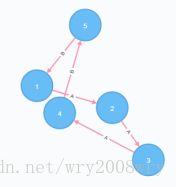
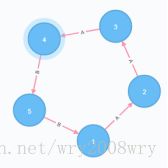
是不是第2张图看起来舒服多了,没有那么纠结。
图2的可视化更能展示出了这个图的本质:它是一个环形图。
通常我们通常可以通过以下标准来衡量一个图布局算法的好坏:1 交叉的边要尽量少
2 边长要尽量均衡
3 布局要尽量对称
4 单位面积能放尽量多的结点
以上标准前面的更重要,而且基本上是满足一些就会减弱另一些,而力引导算法基本上能很好的平衡,所以它算是一个很好的图布局算法。
关于边的交叉,这里不得不提到图论中的一个概念:平面图,所谓平面图就是将一个图画出来,里面没有相交的边,这个过程叫做平面化。需要注意的是不是所有的图都可以平面化的,详情见这里:平面图。
力引导算法的原理是什么?
狭义的、一句话说就是:把相连的结点接到一起,并可能把不相连的节点推开。
再详细一点的解释:
图中的结点存在着两种力
相连的结点间存在引力(弹簧),其值通过胡克定律算出
结点相互之前存在着静电斥力,通过库仑定律处出
这两种力合成转化成位移,导致结点位移,反复迭代最终整个系统会稳定下来,达到某个阈值停止。
所以一般的实现步骤是:
1 初始化结点位置;
2 计算结点的各种受力;
3 计算合力并将其转化为位置;
4 反复迭代直到达到平衡状态;
力引导算法有哪里优点及缺点?
优点:高质量
生成的布局交叉结点少、结点、边分布均匀、高对称性;
可扩展性
可以在其基础上进行扩展,比如固定某些点、让某些点只能在一个固定的轨迹上运动(比如固定其y轴或是让其在一个圆环轨道上运行);
简单
由于其原理简单,实现起来也很容易;
交互性
由于算法本身是一个迭代的过程,布局生成是一个连续的过程,可以将这个过程可视化出来,非常直观。对于已经稳定的布局甚至可以手动手动某个点,然后算法重要布局,再次形成新的布局;
坚实的理论基础
其理论基础为物理定律,可以利用很多现成的方法;
缺点
时间复杂度高
由于使用多次迭代,而且单次迭代中需要计算每个点受到其它所有点的合力,所以基本上时间复杂度为O(n^3);
会出现局部最优
由于初始布局的不同,最终生成的布局可以会陷入局部能量最小,可能与全局最小能量相差很远;
总体来说,力引导算法解决了其它算法很难解决的问题,目前仍然是最好的图布局算法
力引导算法在d3.js中怎么用?
Show me the code!下面是使用的源码,使用d3.js实现了一个力引导布局,你可以直接将上面的代码复制并保存为一个html文件中,直接点击打开,然后修改修改其中的参数看看效果,大胆尝试吧!
1 创建一个svg元素作为显示的容器;
2 定义了结点及连接边的数据;
3 实例化一个力布局模拟器,使用结点信息初始化;
4 创建各种力,施加于模拟器;
5 创建结点及连线的界面元素;
6 处理结点的拖动,将界面的动作反向作用到模拟器内部数据;
7 处理模拟器的tick事件,将模拟器内部的数据可视化出来,每一次tick代表一帧将其反应到界面上;
力引导算法在d3.js到底是怎么实现的?
上面的们提到力引导算法的一般化实现流程为:
1 初始化结点位置
2 计算结点的各种受力
3 计算合力并将其转化为位置
4 反复迭代直到达到平衡状态
在d3.js中也是如此,只是一般的框架为了扩展性,会有一些特别的东西在里面,下面我们来看看d3.js中是怎么实现的。d3.js force的源代码在这里:https://github.com/d3/d3-force/tree/master/src
模块划分如下:
center.js - “中心力”实现,实现结点向中心点收拢;
collide.js - 处理结点的碰撞,即结点在指定半径内不相碰,使用四叉树实现;
constant.js - 定义常量用的函数,因为d3.js中均是使用函数的方式取值,如果是一个常数需要将其包装成一个函数;
jiggle.js - 结点随机抖动,就是返回了一个随机数而已;
link.js - 实现“连接力”,即当两个结点间有边时相互拉拢,但也不能太近;
manyBody.js - 实现“多体”力,用于模拟引力及静电力;
radial.js - “圆环力”,实现半径布局即结点分布在一个圆环上;
simulation.js - 模拟器对象,可以在其上施加多个力;
x.js - “x轴力”,结点固定x坐标;
y.js - “y轴力”,结点固定y坐标;
上面各模块中,最主要的是simulation.js这个模块,它实现了一个完整的模拟器,其它的皆为各种力的实现,所以要看代码要从它开始。
下面我们来深入分析d3.js的实现:
首先我们来看simulation.js这个模块,这个是模拟器的主类,里面实现了力引导的几乎全部流程,除了各种力的具体计算,剩下的其它文件实现了这些力。所有的操作就是从实例化一个simulation对象开始。
我们知道布局的过程是在模拟一个物理过程,反复的计算力然后移动位置,迭代该过程直至达到稳定状态,我们来看这个过程在代码中的体现:
我们一般是这样定义一个模拟器对象的:var simulation = d3.forceSimulation().nodes(nodes_data);,我们知道在js中对象是用函数实现的,进入forceSimulation这个函数(在webstorm中按住ctrl点击它)跳转到exports.forceSimulation = simulation;可以看出forceSimulation是simulation的别名,进入真正的对象simulation,看这个函数的第9行:stepper = timer(step),这里定义了一个定时器,回调函数为step(),继续看它:
function step() {
tick();
event.call("tick", simulation);
if (alpha < alphaMin) {
stepper.stop();
event.call("end", simulation);
}
}先执行tick()这个函数,这个函数即计算各种力的合力然后移动结点,下面alpha < alphaMin的判断,即退出条件。上面已经可能看出整个力引导算法的脉络了,只是其中的细节还没有展开。
event.call("tick", simulation);这句是调用用户注册的事件函数,比如模拟器每次更新了结点的位置需要反应到界面上,就可以在这个函数里面实现,下面的三句说过了:是判断alpha是否小于alphaMin,是则停止模拟器定时器,调用用户注册的事件回调函数
下面继续深挖tick()函数:
function tick() {
var i, n = nodes.length, node;
alpha += (alphaTarget - alpha) * alphaDecay;
forces.each(function(force) {
force(alpha);
});
for (i = 0; i < n; ++i) {
node = nodes[i];
if (node.fx == null) node.x += node.vx *= velocityDecay;
else node.x = node.fx, node.vx = 0;
if (node.fy == null) node.y += node.vy *= velocityDecay;
else node.y = node.fy, node.vy = 0;
}
}forces.each(function(force) {
force(alpha);
});
这里对forces进行迭代,对里面的每一个元素调用其force方法。之所以有多个,是因为一个模拟器中是可以叠加多个力的,比如一个“向心力”,加一个“静电力”,再加一个“连接力”,一般在实际应用中需要对多个力进行叠加、反复调试才可以得到想要的效果。这里计算出所有力的合力在x及y方向上的分量,保存在结点的vx,vy属性中。接下来就是利用计算好的力更新结点位置了
for (i = 0; i < n; ++i) {
node = nodes[i];
if (node.fx == null) node.x += node.vx *= velocityDecay;
else node.x = node.fx, node.vx = 0;
if (node.fy == null) node.y += node.vy *= velocityDecay;
else node.y = node.fy, node.vy = 0;
}移动结点的位置是通过node.x += node.vx *= velocityDecay实现的,node.vx是结点在x方向上的受力,velocityDecay代码移动的速度,这是一个配置项。这里直接将受力与位置关联起来其实是合理的,高中物理我们学过力越大则加速度越大,从而在相同时间内达到的速度越大,进而位移越大。同理y分量。
到这里,从计算受力到移动结点整个流程就完了。
上面我们并没有看到合力具体是怎么计算出来的,只是调用了注册到模拟器的各个力的force()方法。该方法会依照一些配置参数及结点当前所处的位置,计算出结点此时在x方向及y方向上的力的分量,反应到结点的xv,xy属性中,下面我们以“连接力”为例子分析,
var link_force = d3.forceLink(links_data).strength(1).id(function(d){return d.name;});
上面的代码创建了一个连接力对象
simulation.force("links",link_force);
上面的代码将该力施加到模拟中
下面我们来看forceLink.force方法
function force(alpha) {
for (var k = 0, n = links.length; k < iterations; ++k) {
for (var i = 0, link, source, target, x, y, l, b; i < n; ++i) {
link = links[i], source = link.source, target = link.target;
x = target.x + target.vx - source.x - source.vx || jiggle();
y = target.y + target.vy - source.y - source.vy || jiggle();
l = Math.sqrt(x * x + y * y);
l = (l - distances[i]) / l * alpha * strengths[i];
x *= l, y *= l;
target.vx -= x * (b = bias[i]);
target.vy -= y * b;
source.vx += x * (b = 1 - b);
source.vy += y * b;
}
}
}l = (l - distances[i]) / l * alpha * strengths[i];
其中l为两结点间的距离,distances为配置的边的长度,alpha与strengths也基本为常量,所以当距离与配置的边长相等时受力为零,否则都会出现引力或斥力,这就是所谓的弹簧力,遵守胡克定律。一句说就是你配置了一个弹簧的长度,把连接两个结点的边想象成弹簧,当拉得太长时会有一个力把它们拉拢,当太短时弹簧被压缩会将它们推开。其它的力基本也同理,就是运用一些物理上的受力公式进行计算。
- 在进行力布局的时候,我们可以通过两种方式来定制自己的布局,一种是选择d3.js给我们预置的各种力,比如forceX是固定在X轴的力,另外我们也可以在注册的tick事件中修正结点的x,y坐标。
- 整个d3.js force的实现,做到了逻辑模型与界面的分离,这样的好处是界面部分可以使用其它的实现方案,比如现在使用的svg,以后出于性能考虑以后可以换成canvas,而内部布局引擎不用做任何改变。
- 我们可以通过响应tick事件来将布局引擎中的数据反应到界面上,同理界面上的拖动操作也可以通过更改模型中的结点位置来实现。
参考
D3.js force帮助文档:https://github.com/d3/d3-force/blob/master/README.md
D3.js force源代码:https://github.com/d3/d3-force/tree/master/src
Verlet积分:https://en.wikipedia.org/wiki/Verlet_integration
力引导算法:https://en.wikipedia.org/wiki/Force-directed_graph_drawing
力引导算法的一个实现:https://blog.csdn.net/newworld123made/article/details/51443603