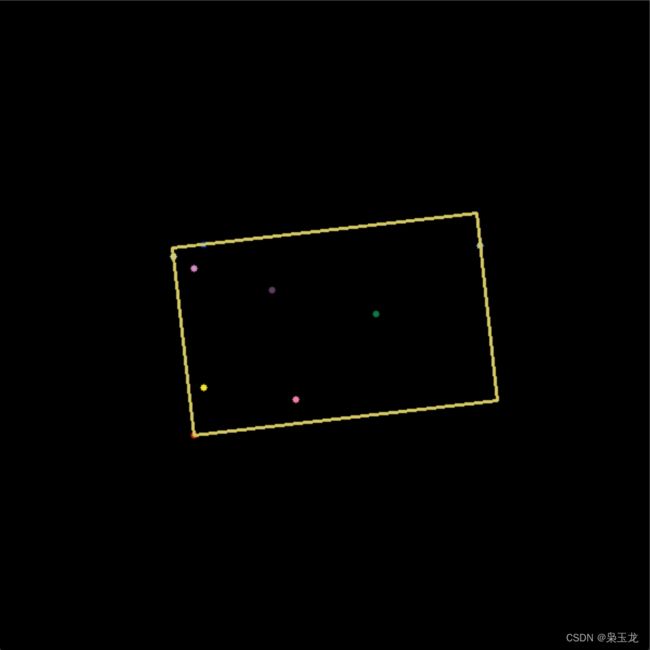
外部矩形边界:boundingRect()函数
#include
#include
#include
#include
using namespace std;
using namespace cv;
#include
#include
using namespace cv;
#include
int main()
{
Mat image(600, 600, CV_8UC3);
RNG& rng = theRNG();
while(1)
{
int count = rng.uniform(3, 103);
vector<Point> points;
for (int i = 0; i < count; i++)
{
Point point;
point.x = rng.uniform(image.cols / 4, image.cols * 3 / 4);
point.y = rng.uniform(image.rows / 4, image.rows * 3 / 4);
points.push_back(point);
}
RotatedRect box = minAreaRect(Mat(points));
Point2f vertex[4];
box.points(vertex);
image = Scalar::all(0);
for (int i = 0; i < count; i++)
circle(image, points[i], 3, Scalar(rng.uniform(0, 255), rng.uniform(0, 255), rng.uniform(0, 255)), FILLED);
for (int i = 0; i < 4; i++)
line(image, vertex[i], vertex[(i + 1) % 4], Scalar(100, 200, 211), 2);
imshow("矩形包围示例", image);
char key = (char)waitKey();
if (key == 27 || key == 'q' || key == 'Q')
break;
}
return 0;
}
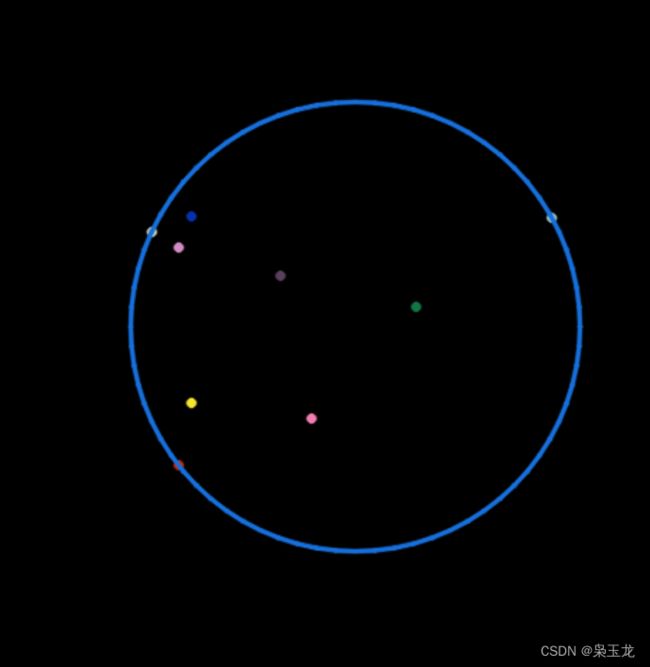
轮廓的圆形边界
#include
#include
#include
#include
using namespace std;
using namespace cv;
#include
#include
using namespace cv;
#include
int main()
{
Mat image(600, 600, CV_8UC3);
RNG& rng = theRNG();
while (1)
{
int count = rng.uniform(3, 103);
vector<Point> points;
for (int i = 0; i < count; i++)
{
Point point;
point.x = rng.uniform(image.cols / 4, image.cols * 3 / 4);
point.y = rng.uniform(image.rows / 4, image.rows * 3 / 4);
points.push_back(point);
}
Point2f center;
float radius = 0;
minEnclosingCircle(Mat(points), center, radius);
image = Scalar::all(0);
for (int i = 0; i < count; i++)
circle(image, points[i], 3, Scalar(rng.uniform(0, 255), rng.uniform(0, 255), rng.uniform(0, 255)), FILLED, LINE_AA);
circle(image, center, cvRound(radius), Scalar(rng.uniform(0, 255), rng.uniform(0, 255), rng.uniform(0, 255)), 2, LINE_AA);
imshow("圆形包围示例", image);
char key = (char)waitKey();
if (key == 27 || key == 'q' || key == 'Q')
break;
}
return 0;
}
使用多边形包围轮廓
#include
#include
#include
#include
using namespace std;
using namespace cv;
#include
#include
using namespace cv;
#include
#define WINDOW_NAME1 "【原始图窗口】"
#define WINDOW_NAME2 "【效果图窗口】"
Mat g_srcImage;
Mat g_grayImage;
int g_nThresh = 50;
int g_nMaxThresh = 255;
RNG g_rng(12345);
void on_ContoursChange(int, void*);
static void ShowHelpText();
int main()
{
system("color 1A");
g_srcImage = imread("1.jpg", 1);
if (!g_srcImage.data) { printf("读取图片错误,请确定目录下是否有 imread 函数指定的图片存在~! \n"); return false; }
cvtColor(g_srcImage, g_grayImage, COLOR_BGR2GRAY);
blur(g_grayImage, g_grayImage, Size(3, 3));
namedWindow(WINDOW_NAME1, WINDOW_AUTOSIZE);
imshow(WINDOW_NAME1, g_srcImage);
createTrackbar(" 阈值:", WINDOW_NAME1, &g_nThresh, g_nMaxThresh, on_ContoursChange);
on_ContoursChange(0, 0);
waitKey(0);
return(0);
}
void on_ContoursChange(int, void*)
{
Mat threshold_output;
vector<vector<Point>> contours;
vector<Vec4i> hierarchy;
threshold(g_grayImage, threshold_output, g_nThresh, 255, THRESH_BINARY);
findContours(threshold_output, contours, hierarchy, RETR_TREE, CHAIN_APPROX_SIMPLE, Point(0, 0));
vector<vector<Point> > contours_poly(contours.size());
vector<Rect> boundRect(contours.size());
vector<Point2f>center(contours.size());
vector<float>radius(contours.size());
for (unsigned int i = 0; i < contours.size(); i++)
{
approxPolyDP(Mat(contours[i]), contours_poly[i], 3, true);
boundRect[i] = boundingRect(Mat(contours_poly[i]));
minEnclosingCircle(contours_poly[i], center[i], radius[i]);
}
Mat drawing = Mat::zeros(threshold_output.size(), CV_8UC3); for (int unsigned i = 0; i < contours.size(); i++)
{
Scalar color = Scalar(g_rng.uniform(0, 255),
g_rng.uniform(0, 255), g_rng.uniform(0, 255));
drawContours(drawing, contours_poly, i, color, 1, 8, vector<Vec4i>(), 0, Point());
rectangle(drawing, boundRect[i].tl(), boundRect[i].br(), color, 2, 8, 0);
circle(drawing, center[i], (int)radius[i], color, 2, 8, 0);
}
namedWindow(WINDOW_NAME2, WINDOW_AUTOSIZE);
imshow(WINDOW_NAME2, drawing);
}
