Jetson Orin NX 开发指南(5): 安装 OpenCV 4.6.0 并配置 CUDA 以支持 GPU 加速
一、前言
Jetson 系列的开发板 CPU 性能不是很强,往往需要采用 GPU 加速的方式处理图像数据,因此本文主要介绍如何安装带有 GPU 加速的 OpenCV,其中 GPU 加速通过 CUDA 来实现。
参考博客
Ubuntu 20.04 配置 VINS-Fusion-gpu + OpenCV 4.6.0-CSDN博客Ubuntu 20.04 配置 VINS-Fusion-gpu + OpenCV 4.6.0https://blog.csdn.net/qq_44998513/article/details/131462679Ubuntu 20.04 配置 VINS-Fusion-gpu + OpenCV 4.6.0https://blog.csdn.net/qq_44998513/article/details/131462679Ubuntu 20.04 配置 VINS-Fusion-gpu + OpenCV 4.6.0https://blog.csdn.net/qq_44998513/article/details/131462679Ubuntu 20.04 配置 VINS-Fusion-gpu + OpenCV 4.6.0https://blog.csdn.net/qq_44998513/article/details/131462679
二、安装 OpenCV 4.6.0
下载 opencv 源码,选择所需要的版本 opencv 4.6.0,相应的扩展 opencv_contrib 4.6.0,以及用于桥接 ROS 和 opencv 的 cv_bridge
Release OpenCV 4.6.0 · opencv/opencv · GitHub
Release 4.6.0 · opencv/opencv_contrib · GitHub
GitHub - ros-perception/vision_opencv at noetic
这里将 opencv 4.6.0 以及相应的扩展 opencv_contrib 4.6.0 下载到 ~/Documents 目录下,编译前现确定 opencv 的安装路径,我的安装路径是
CMAKE_INSTALL_PREFIX=/usr/local/确定 Jetson Orin NX 的算力为 8.7,这个后面要用,参考
CUDA GPUs - Compute Capability | NVIDIA Developer

安装cuda 可以参考上一期文章
Jetson Orin NX 开发指南(4): 安装 cuda 和 realsense_想要个小姑娘的博客-CSDN博客
如果需要安装其他版本的 cuda 与算力的匹配情况可以参考
https://en.wikipedia.org/wiki/CUDA#GPUs_supported
接下来,进入 opencv 4.6.0 文件夹
cd ~/Documents/opencv-4.6.0/
mkdir build && cd build预编译 opencv 4.6.0 及其扩展模块 opencv_contrib-4.6.0,生成 Makefiles 文件
cmake -D CMAKE_BUILD_TYPE=RELEASE \
-D CMAKE_INSTALL_PREFIX=/usr/local/ \
-D OPENCV_EXTRA_MODULES_PATH=../../opencv_contrib-4.6.0/modules \
-D WITH_CUDA=ON \
-D CUDA_ARCH_BIN=8.7 \
-D CUDA_ARCH_PTX="" \
-D ENABLE_FAST_MATH=ON \
-D CUDA_FAST_MATH=ON \
-D WITH_CUBLAS=ON \
-D WITH_LIBV4L=ON \
-D WITH_GSTREAMER=ON \
-D WITH_GSTREAMER_0_10=OFF \
-D WITH_QT=ON \
-D WITH_OPENGL=ON \
-D CUDA_NVCC_FLAGS="--expt-relaxed-constexpr" \
-D WITH_TBB=ON \
..其中
CMAKE_INSTALL_PREFIX=/usr/local/ 为安装地址,
OPENCV_EXTRA_MODULES_PATH=../../opencv_contrib-4.6.0/modules 为扩展模块所在路径,
CUDA_ARCH_BIN=8.7 为 GPU 算力,
编译完成后如下所示

然后 make install 编译安装 opencv 4.6.0 及其扩展模块 opencv_contrib-4.6.0,电脑性能好的话可以多核编译 make -j8,如果出现兼容性错误的花建议用 make,速度慢一点,终端输入
sudo make install -j8这里编译会很慢,耐心等待,只要一开始没有什么报错后面就不会报错。

经过漫长的等待,最后编译安装完成后如上所示,最后可以打开 jtop 查看带 GPU 加速的 OpenCV 是否已经安装完成,终端输入
jtop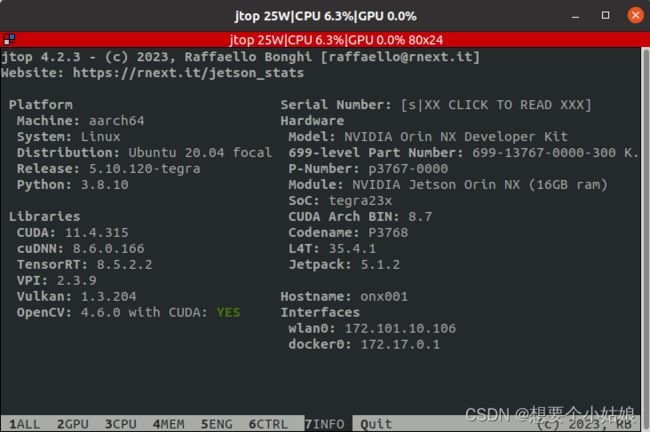
点击最下反的 7 INFO 我们发现 OpenCV: 4.6.0 with CUDA: YES 表示以及安装成功!
三、配置 cv_bridge 功能包
因为 opencv 的数据和 ROS 的数据需要转化,因此需要通过 cv_bridge 这个桥接工具,接下来我们介绍怎么自己下载安装并配置一个自己的 cv_bridge 功能包。
首先,创建一个 ROS 的工作空间
mkdir -p ~/catkin_pkg/src/
cd ~/catkin_pkg/src/然后,下载对应版本的源码,因为是 JetPack 5.1.2 对应 Ubuntu 20.04 因此下载 noetic 版本
GitHub - ros-perception/vision_opencv at noetic
下载完成后解压到 ~/catkin_pkg/src/ 目录下,因为我们只需要 cv_bridge,所以只需保留 cv_bridge 文件夹,将其放在 ~/catkin_pkg/src/ 目录下,然后修改一下 cv_bridge 的配置文件