51单片机学习历程---单片机入门
主要用来做控制的,如果要驱动外部设备的话,需要使用驱动电路
proteus 模拟
51 8位
最小系统
晶振电路-----提供时钟 12M(方便计算机器周期) 11.0592M(非常适合串行通信,设置波特率的时候误差是0)
复位电路------提供系统复位(手动复位)-----(上电自动复位)
电源电路-----供电电压(51漏极开路,要输出高电平要外接上拉电阻)
只能实现单片机的正常运行
如果需要烧写就要加上-----下载电路
电平特性
不是说一定要到5V才算是高电平,也不是0V才是低电平,有一个临界电压,在临界电压之上就算是高电平,之下就是低电平。
高电平,低电平,高阻态
Sbit位定义
sbit LED1 = P2^0;
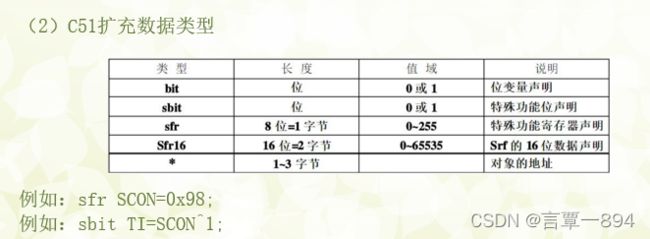
typedef unsigned char u8; 0~127
typedef unsigned int u16; 0~65535
GPIO
是通用输入输出端口的简称,可以通过软件来控制其输入和输出
#include"intrins"
循环左移函数 _crol_(起始位,移动几位)
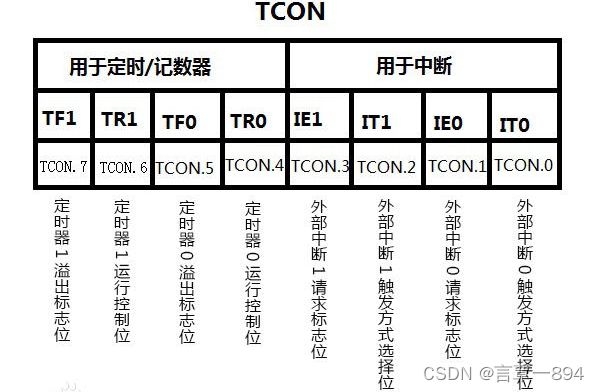
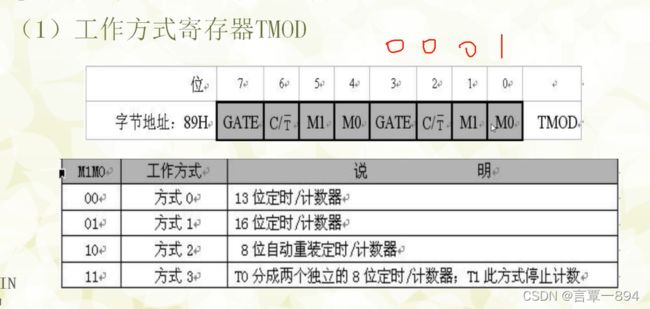
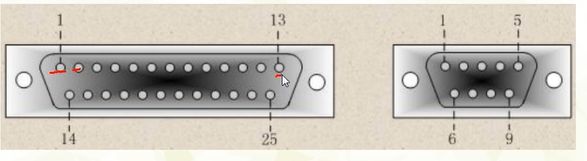
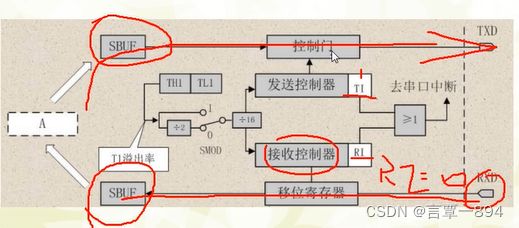
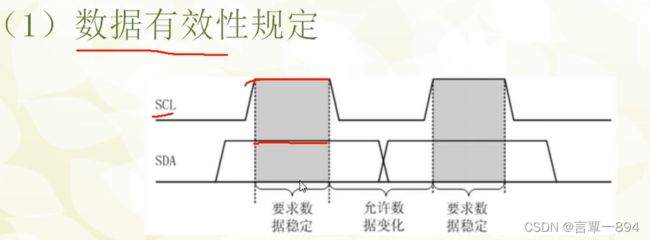
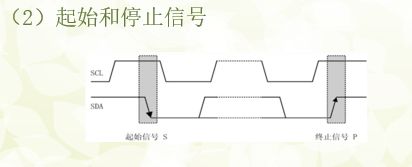
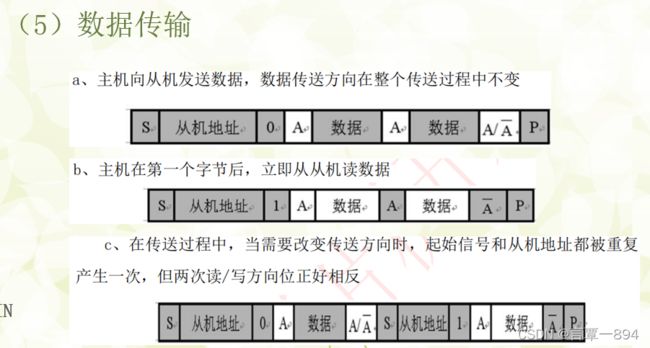
LED_PORT=~(0x01< 移位的话,左移补0 右移:正数补0,负数补1 使用函数的话:缺省的位是循环的 LED_PROT=~(0x01); LED_PROT=_crol_(LED_PORT,1); 循环右移函数 _cror_ 无源蜂鸣器(稍大,需要一定频率的脉冲信号)(改频率改音调) 压电式蜂鸣器 有源蜂鸣器(稍小)(音调一般改变不了) 电磁式蜂鸣器 驱动通常需要30mA 通常IO口不足,不会直接使用IO管脚进行驱动 可以使用一些放大电路(三极管)(如果是无源蜂鸣器,即使三极管导通,不给一定频率的脉冲信号,蜂鸣器也不会有声音) 发光二极管 共阳极数码管 单片机电压无法驱动,要外接 共阴极数码管 静态数码管(不推荐) 动态数码管 位选 段选(a-g-dp) 三八译码器----74HC138 一个数码管显示之后,要进行消影 SMG_A_DP_PORT=0x00;//消影 把上一次的数码管赋值的有效对下一个数码管赋值的影响。 行列式 线翻转 先传高位再传地位 如果要使用IO扩展的时候,要是OE和GND相连,使芯片工作 SER 数据寄存器 SRCLK 移位寄存器时钟的输入引脚(高低电平转换传输数据) RCLK 存储寄存器时钟的输入引脚 通过第九引脚QH进行多个IO的扩展 是由发光二极管排列组成的显示器件 使用595芯片进行控制 用于驱动大功率器件(电灯,显示屏) 不仅可以用来驱动直流电机,还可以驱动步进电机。 由七对达灵顿管(NPN) 左右两边相当于一个非门的操作,左边输入是1,右边输出0 但是左边是低电平,右边不会变成高电平。 可以输出低电平,不能输出高电平(如果要输出高电平的话,要外接上拉电阻) 直流单机能将直流电能转换成机械能 需要知道直流电机的额定电压和额定功率。 是将电脉冲信号转变成角位移或线位移的开环控制元件 转速,停止的位置-----只取决于脉冲信号的频率和脉冲数 一个脉冲使电机转动一个步距角 单极性步进电机------五线四相步进电机 双极性步进电机-------四线双极性步进电机 技术指标:静态: 相数---电机里的线圈数 拍数----转一圈所需要的脉冲数 步距角----一个脉冲信号驱动电机转动的角度 定位转距-----不通电状态所在的位置 静转矩 TC1508S芯片驱动 分时操作、实时响应、可靠性高 中断嵌套 只要是51的芯片就一定会有INT0、INT1,T1、T2、串口 四个外部中断 INT0、INT1、INT2、INT3 中断响应条件: 1、中断源有中断请求 2、中断源允许位为1 3、CPU开中断 例如: 中断0: 中断1 1、配置TCON的IT0为1或为0 2、EX0(允许位) 3、EA(总中断) TCON的 INT0 =1----下降沿触发 =0----低电平触发 IE---EX0和EA EA控制总中断 每个中断的优先级可以通过软件设置(一般不修改) T1、T2、T3、T4 溢出请求,进入中断 1、振荡周期 2、状态周期 3、机器周期 4、指令周期 外接晶振为12MHz时,51单片机相关周期的具体值为 振荡周期=1/12us 状态周期=1/6us 机器周期=1us 指令周期1~4us TF1、TF0:分别是定时器1、定时器0的溢出标志位。当定时器x计满溢出时,由硬件使TFx位置“1”,并申请中断。进入中断服务程序后,由硬件自动清“0”,在查询方式下用软件清“0”。 TR1、TR0:分别是定时器1、定时器0的运行控制位。由软件清“0”关闭定时器。当GATE=1,且INTx为高电平时,TR置“1”启动定时器;当GATE=0,TRx置“1”启动定时器。 IE1、IE0:分别为外部中断1、外部中断0的请求标志位。 IT1、IT0:分别为外部中断1、外部中断0的触发方式选择位。当ITx=0,为低电平触发方式;当ITx=1,为下降沿触发方式。 高八位和低八位T1 T0 GATE一般设为0,启动通过TR0进行控制 C/T 设为1---是计数模式 0----为定时模式 TMOD----确定工作方式 TCON----高四位定时器控制位(停止、启动、溢出) 第四位外部中断 1、对TMOD赋值,确定T0和T1的工作方式 2、根据所要定时的时间计算初值,并将其写入TH0、TL0、TH1\TL1 3、如果使用中断,要EA 4、使TR0或TR1置位,启动定时/计数器 例如: 是一种通信标准 DB25 DB9 通常用TXD RXD SGND---设备之间要接地 RS232标准 1 -3~ -15V 0 +3 ~ +15 单片机一般用TTL标准 1 5V 0 0V 通信设备要共GND 尽量使用11.0592M 数据寄存在SBUF 波特率计算靠TH1和TL1里面的数据 在使用串口的时候,要打开定时器1,工作在模式2(自动重载) 先传低位,再传高位 接收完毕RI硬件置1 ,进入中断服务函数之后软件将RI清零 发送完毕TI硬件置1 ,进入中断服务函数之后软件将TI清零 方式0 fosc/12 方式1 (2^SMOD/32)*(T1溢出率)----溢出率=foc/12/(256-初值) 开发工具里有一个波特率计算 串口初始化步骤 1、确定T1的工作方式(TMOD寄存器)-----定时器1--工作方式2(八位重载) 2、确定串口工作方式(SCON寄存器) 3、计算T1的初值(设置波特率),装载TH1、TL1 4、启动T1(TCON中的TR1位) 5、如果使用中断,需要启动串口中断控制位(IE寄存器) ES=1;EA=1 例如: SCL SDA 支持多主机多从机的连接模式 没个设备都有一个独立的地址 接了上拉电阻,空闲状态处于高电平 多个主机需要占用总线时,使用仲裁方式决定哪个设备占用总线 三种传输模式 标准100kbps/s 400k 3.4m 连接设备的数量的最大额度受总线的电容限制400pf SCL高电平时要求数据稳定 先传高位,再传低位 一次传九位(八位数据位,一位应答位) 芯片掉电不消失 App------存放外设的一些驱动文件 Obj-----生成的乱七八糟的文件 Public----各个单片机都能使用的文件 User------用户的主函数 #include"intrins" 左移右移函数 可以使用nop() 进行延时,一个nop()代表一个机器周期,在12M晶振中相当于延时了1us 涓流充电(是用来弥补电池在充满电后由于自放电而造成的容量损失。一般采用脉冲电流充电来实现上述目的。为补偿自放电,使蓄电池保持在近似完全充电状态的连续小电流充电。又称维护充电。) 读一次得到最低位 temp 读八次 value=(temp<<7)|(value>>1) 或者 dat>>1; if(读取是1) dat |=0x80 读取的是0,不管他,直接继续循环进行移位,左边会补0 读一次得到最高位 temp 读八次 value+=temp value<<1 NEC协议: 没有接收到脉冲信号的时候为高电平 采样,保持,量化,编码 采样保持电路 直接比较:逐次逼近型ADC、并行的ADC 间接比较:双积分型ADC 板子上接了AD1 电位器、 NTC1 热敏传感器、 GR1 光敏传感器, 通常使用PWM(脉冲宽度调制)模拟 使用占空比模拟输出模拟信号 带字库的 TFTLCD(彩屏) 薄膜晶体管液晶显示器 图片取模,加const(常量)-----使其存放在flash中 触摸屏: 电阻式触摸屏 精度高,稳定性好,价格低------工业上 容易被划伤,透光性不好。 不支持多点触摸, 电容式触摸屏 人体感应进行触点检测 表面式电容触摸屏----单点触摸 投射式电容触摸屏----多点触摸,寿命长,灵敏度高 在Keil 51中,code修饰的变量放在ROM(Flash)中,而const修饰的变量为只读(不可修改),放在RAM中!可以用“code const”修饰变量,表示变量存储在ROM中,且为只读,由此看来“code”与“code const”修饰变量有一样的功用。 Keil MDK中的const与code 在Keil MDK中,如进行STM32的开发,code修饰符无法使用,使用的话会报错。那么要怎么来修饰存放在ROM中的变量?此时是用到const,用const修饰的变量是存放在ROM中的。 总结,注意不同编译器对于const与code的规定。code一般用于51中,而const应用则非常广泛,注意其在不同的编译环境中表现的数据存储位置。 定义的时候加这个,可以把数据存放到外部存储区里 NC--------不通电处于常闭 NO-------不通电是处于常开 半双工 有且只有一个主机,剩下的全是从机 烧录器是用来将特定格式的程序文件(比如*.hex *.bin等格式)烧进单片机的内部EEPROM,使其上电后能运行你烧入的程序。也就是说你每次修改完程序需要验证的时候都得烧一次芯片,然后接到板子上,再上电运行,而且不支持多种调试方式。 仿真器是通过硬件和相应的软件对单片机进行仿真,可以直接接在用户板上运行程序,还可以进行程序调试(单步、断点等),它不需要每次修改程序都烧写芯片,更没有来回拆、装芯片的麻烦,是学习单片机极其方便的工具。不过一般情况下,价格较高。蜂鸣器(BEEP)
数码管(7段\8段 位数)
独立按键
矩阵按键
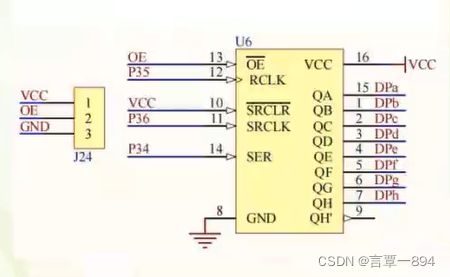
IO扩展(串转并)-----74HC595
LED点阵
ULN2003芯片
直流电机(没有正负极)
步进电机
四线双极性步进电机
中断系统


EA=1; //打开总中断
EX0=1; //开外部中断0
IT0= 0/1; //设置中断的触发的方式
void exti0() interrupt 0 -------中断0的入口是0 //1是定时器0的入口
{
//功能代码
} EA=1; //打开总中断
EX1=1; //开外部中断0
IT1= 0/1; //设置中断的触发的方式
void exti1() interrupt 2 ------中断1的入口是2
{
//功能代码
}定时器/计数器
CPU时序的有关知识
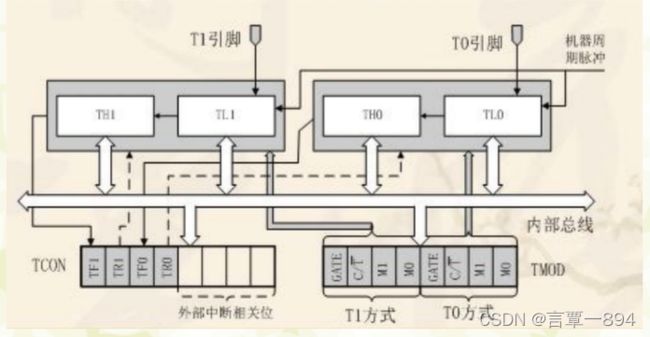
定时器配置
void time0_init(void)
{
TMOD|=0X01; //选择为定时器0模式,工作方式1
(这里使用或运算,可以不影响高八位)
TH0=0XFC; //给定时器赋初值,定时1ms
THL=0X18;
ET0=1; //打开定时器0中断允许
EA=1; //开总中断
TR0=1; //打开定时器
}void time0() interrupt 1
{
static u16 i = 0;
TH0=0XFC; //进入中断服务程序之后重新赋初值
THL=0X18;
i++;
if(i==1000)
{
LED1=!LED1;
i=0;
}
}串口

MAX232转换芯片 可以将RS232和TTL进行转换
串口通信

波特率
void uart_init(u8 baud)------baud用来设置波特率
{
TMOD|=0x20 //设置定时器1工作方式2
SCON=0X50 //设置串口为工作方式1
PCON=0X80 //波特率加倍
TH1=baud //设置计数器初值
TL1=baud
ES=1 //打开接受中断
EA=1 //打开总中断
TR1=1 //打开定时器
}void uart() interrupt 4
{
u8 dat = 0;
RI=0;
dat = SBUF;
SBUF=dat;
while(!TI);
TI=0;
}CH340 USB转串口
MAX232 RS-232转串口
IIC-EEPROM

AT24C02芯片(256个字节)
创建多文件工程
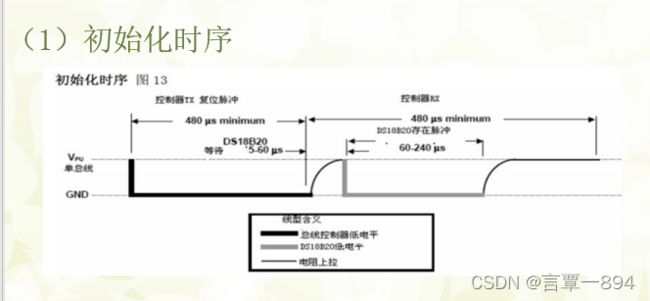
DS18B20温度传感器

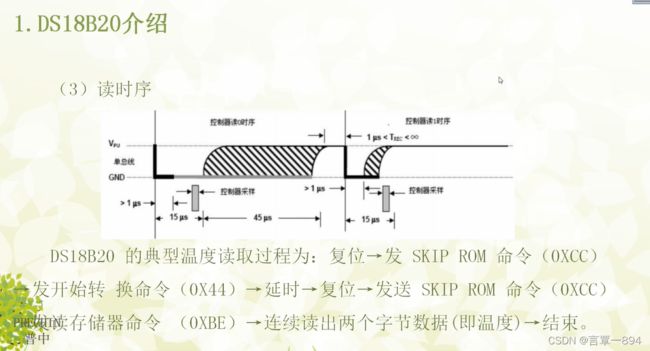
NOP()
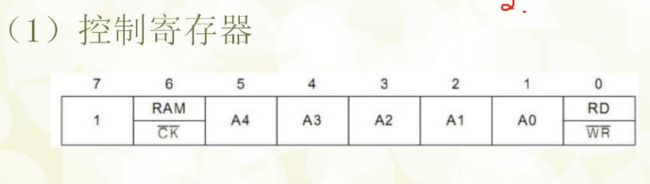
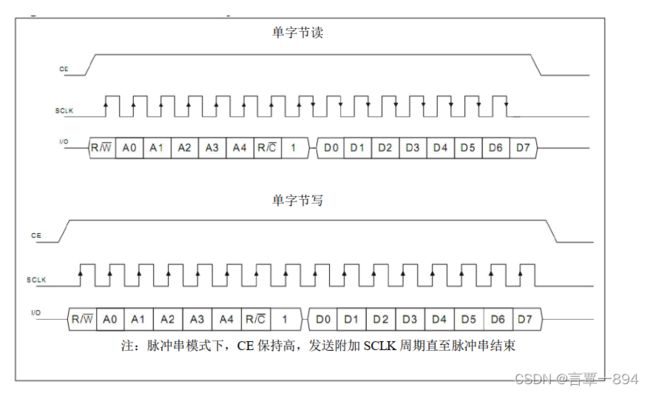
DS1302时钟芯片



读数据
红外遥控器(HS0038)

ADC模数转换器(XPT2046)(逐步逼近)
DAC数模转换
LCD1602液晶显示(字符型)
LCD12864液晶显示(像素点)四行(每行八个字)
51中的const与code & Keil MDK中的const与code
xdata
继电器
IO拓展(并转串口)--74HC165
RS485通信
0X30, 这个值是将数字
0-9 转换为 ASCII 码
仿真器和烧录器