基于PYNQ的RT-Thread移植
- 配置需求
- 操作系统:Windows 10
- 硬件设备:PYNQ-Z1
- 开发环境:Vivado2018.3
- RT-Thread系统版本:https://gitee.com/rtthread/rt-thread,标签:V4.0.3
- 移植步骤
- 安装PYNQ-Z1的board file文件
通过网址https://github.com/cathalmccabe/pynq-z1_board_files将下载好的PYNQ-Z1.zip文件解压到安装好的vivado路径Vivado\2018.3\data\boards\board_files下面即可。
- 使用vivado创建工程文件
首先在E盘,也可以在其它磁盘创建一个空的文件夹用来存放工程,取名为workspace。打开vivado,选择新建一个工程。点击Next。工程路径存放在之前我们创建的workspace空文件夹下面,然后工程名称取名为rtthread。然后,点击Next选择“RTL project”,选择Next,选择“Boards”,找到PYNQ-Z1,选择Next(如下图所示)。

选择Finish即可完成工程的创建。
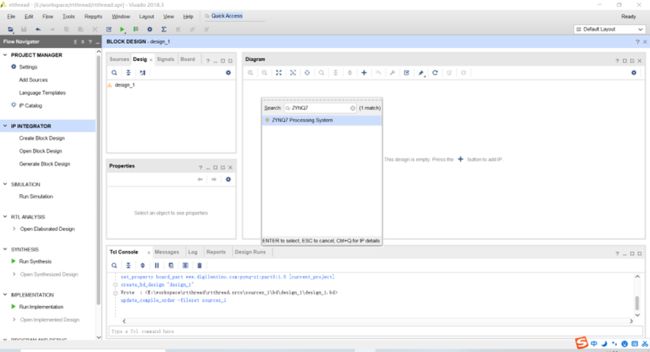
然后,选择左侧“Create Block Design”,跳出对话框,默认点OK,选择“+”添加IP,
选择类型为ZYNQ7。
选择“Run Block Automation”,跳出对话框,默认点OK,此时会自动连接引脚。将M_AXI_GP0_ACLK引脚连接到FCLK_CLK0,否则在生成HDL的时候会报错。

切到“source”下,右击选择“Create HDL Wrapper…”,跳出对话框默认OK。
右击选择“Generate Output Product”。跳出对话框默认Generate即可。点击左侧“Generate Bitstream”,生成bit流文件。跳出对话框默认OK即可。
将硬件信息导出,如下图所示。
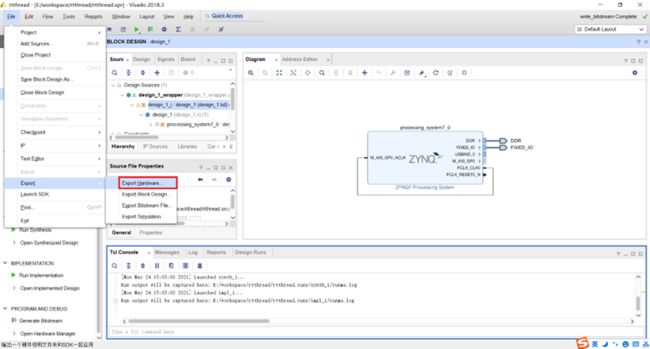 导出的时候比特流文件也要导出,记得勾选。否则后期生产BOOT.BIN缺失FPGA文件。
导出的时候比特流文件也要导出,记得勾选。否则后期生产BOOT.BIN缺失FPGA文件。

此时在工程文件下的SDK文件夹下面就会出现design_1_wrapper.hdf文件。即硬件描述文件。
- 通过SDK移植RT-Thread系统
接着之前的vivado工程,在FILE选择Lanch SDK打开SDK。跳出对话框默认选择ok。
选择“File”→“New”→“Application Project”,弹出New Project视图,输入工程名称rtthread,单击Next,选择Empty Application,单击Finish完成硬件平台的创建。
在rtthread.sdk\rtthread目录下,新建rt-thread目录。将下载的rtthread代码放入该目录。为了减少编译错误,先移植rtthread的内核以及shell功能,将源码的未用组件及无关目录进行删除,工程没有使用scons构建工具,其相关文件均可删除。

其中,
- bsp文件夹,删除除zynq7000外的所有文件夹;
- components文件夹,删除除drivers、finsh外的所有文件夹;
- components\drivers文件夹,删除除include、serial、src外的所有文件夹;
- 删除documentation文件夹;
- 删除examples文件夹;
- libcpu文件夹,删除除arm外的所有文件夹;
- libcpu\arm文件夹,删除除zynq7000外的所有文件夹;
- 内核tools文件夹。
- 将bsp\zynq7000\applications目录下的application.c文件移到rtthread.sdk\rtthread\src目录下。
在rtthread项目文件夹上单击鼠标右键,选择Properties。在弹出的Properties for rtthread视图左侧选择“C/C++ Build”→“Settings”。在右侧Settings界面选择“Tool Settings”→“ARM v7 gcc compiler”→“Directories”。在Include Paths中依次添加需要的内核头文件库目录,单击Apply应用配置变更。内核头文件目录如下表所示:
| rtthread\rtthread.sdk\rtthread\rt-thread\include |
| rtthread\rtthread.sdk\rtthread\rt-thread\bsp\zynq7000 |
| rtthread\rtthread.sdk\rtthread\rt-thread\bsp\zynq7000\drivers |
| rtthread\rtthread.sdk\rtthread\rt-thread\libcpu\arm\zynq7000 |
| rtthread\rtthread.sdk\rtthread\rt-thread\components\finsh |
| rtthread\rtthread.sdk\rtthread\rt-thread\components\drivers\include |
添加链接配置文件。在右侧Settings界面选择“Tool Settings”→“ARM v7 gcc linker”→“Linker Script”。在Linker Script中添加需要的链接配置文件,此处选择rtthread.sdk\rtthread\rt-thread\bsp\zynq7000\zynq7000.ld文件,单击Apply应用配置变更。
修改application.c文件的rt_init_thread_entry()函数如下所示,为了方便看出rtthread启动任务的效果,在该函数添加while(1)循环。
| /* thread phase init */ static void rt_init_thread_entry(void *parameter) { /* do component initialization */ rt_components_init(); while (1) { rt_thread_delay(100); rt_kprintf("running on cpu %d\n", rt_cpu_get_smp_id() & 0x0f); } /* add your initialization here */ } |
此时,刷新rtthread项目编译,编译通过。
- 调试
首先,板卡选择JTAG模式。
右键点击rtthread工程,选择“Debug As”→“Debug Configurations…”,进入到Debug Configurations对话框。
双击“Xilinx C/C++ application(System Debugger) ”,进入到“System Debugger using Debug_rtthread.elf on Local”。在Target Setup标签页,选择“Reset entire system”。在Applications标签页,“Application”选择编译生成的rtthread.elf文件。点击Debug,进入调试界面。点击“Suspend”,让程序进入到暂停状态。进入application.c文件,在rt_thread_delay(100)行,右键选择“Run to Line”,让程序运行到该任务。
- 模块移植
- 时钟修改
参考时钟定义在board.h,参考数据手册或者创建工程中zynq模块中的时钟定义对该文件进行修改。
- 串口模块
- 串口驱动文件有uart.c和uart_hw.h文件。
- 修改uart0的管脚为MIO14和MIO15。
- 打印为乱码,怀疑为波特率设置不对,确定Zynq7000_SLCR_UART_CLK_CTRL寄存器的配置存在问题,需要在配置之前将该寄存器置0。
__REG32(Zynq7000_SLCR_BASE+Zynq7000_SLCR_UART_CLK_CTRL) &= 0x0;
__REG32(Zynq7000_SLCR_BASE+Zynq7000_SLCR_UART_CLK_CTRL) |= (0x14 << 8) | 0x01;
经过修改,串口打印正常,如下图所示。

- 网口模块
移植net目录下得lwip-1.4.1模块,
- 删除无关代码。
- 编译过程中,ethernetif.c文件提示如下三个宏未定义,源代码中,宏通过配置文件定义,因此在ethernetif.h添加宏定义。
| #define RT_LWIP_IPADDR "192.168.1.9" #define RT_LWIP_GWADDR "192.168.1.1" #define RT_LWIP_MSKADDR "255.255.255.0" |
- 在开始运行过程中,网络可以ping通,但串口打印不正常,提示“(priority < RT_THREAD_PRIORITY_MAX) assertion failed at function:_rt_thread_init,”,判断是_rt_thread_init()函数中对优先级进行判断时出现问题。经过跟踪,发现在lwip模块中定义任务时,由于以下定义优先级的宏大于RT_THREAD_PRIORITY_MAX而导致出错,而以下几个宏在源代码中是通过配置文件处理的,因此,参考源代码中的配置文件修改宏结果如下:
| #define TCPIP_THREAD_PRIO 10 #define RT_ETHERNETIF_THREAD_PREORITY 12 |
经过修改,网口可以正常ping,串口也打印正常,如下图所示。
