KASan介绍
目录
概括介绍
配置说明
单独关闭读或写检查
操作使用
影响及注意事项
结果解读
使用注意
实现原理简介
KASAN原理
malloc原理
内容参考
概括介绍
- KernelAddressSANitizer (KASAN) 是一个动态内存错误检测器。它提供了一个快速而全面的解决方案,用于查找释放后使用(use-after-free)和越界等错误。
- KASAN 使用编译插桩来检查每次内存访问,因此您需要 GCC 版本 4.9.2 或更高版本。如果希望能够对栈或者全局变量的越界访问做检测,那么需要GCC 5.0或者更高的版本。
- 插桩主要是针对在llvm/gcc编译器级别对访问内存的操作(store,load,alloca等),将它们进行处理。动态运行库主要提供一些运行时的复杂的功能(比如poison/unpoison shadow memory)以及将malloc,free等系统调用函数hook住。
- 该算法的思路是:ASAN用的是shade memory直接标记内存的状态(global、stack、heap、free),每次内存读写,先检查标记再操作实际内存。
配置说明
# 启用KASan
CONFIG_MM_KASAN=y
# 全局开启KASan,可能会导致image大小暴涨,通常会翻倍
CONFIG_MM_KASAN_ALL=y
也可以对单个文件或者应用启用KASan来有效减少KASan带来的体积增加,例如,如果只想对apps/examples/hello应用程序进行检测,可以在它的Makefile(apps/examples/hello/Makefile)中添加:
CFLAGS += -fsanitize=kernel-address
CXXFLAGS += -fsanitize=kernel-address
想对某个目录去掉kasan:
CFLAGS += -fno-sanitize=kernel-address单独关闭读或写检查
默认Kasan对读写都做检查,会显著降低系统的性能、增大image大小。
当确定发生的问题是内存写导致的错误时,可以关闭读检查,提高系统性能和运行速度,进而间接提高问题的复现度。
关闭读检查后,flash占用空间overhead也将大幅降低,对于穿戴设备,关闭读检查后,flash空间减小约1MB。
# 开启改选项将会关闭Kasan读检查
CONFIG_MM_KASAN_DISABLE_READS_CHECK=y
# 开启该选项将关闭Kasan写检查
CONFIG_MM_KASAN_DISABLE_WRITES_CHECK=y操作使用
void __asan_handle_no_return(void);
void __asan_report_load_n_noabort(FAR void *addr, size_t size);
void __asan_report_store_n_noabort(FAR void *addr, size_t size);
void __asan_report_load16_noabort(FAR void *addr);
void __asan_report_store16_noabort(FAR void *addr);
void __asan_report_load8_noabort(FAR void *addr);
void __asan_report_store8_noabort(FAR void *addr);
void __asan_report_load4_noabort(FAR void *addr);
void __asan_report_store4_noabort(FAR void *addr);
void __asan_report_load2_noabort(FAR void *addr);
void __asan_report_store2_noabort(FAR void *addr);
void __asan_report_load1_noabort(FAR void *addr);
void __asan_report_store1_noabort(FAR void *addr);
void __asan_loadN_noabort(FAR void *addr, size_t size);
void __asan_storeN_noabort(FAR void * addr, size_t size);
void __asan_load16_noabort(FAR void *addr);
void __asan_store16_noabort(FAR void *addr);
void __asan_load8_noabort(FAR void *addr);
void __asan_store8_noabort(FAR void *addr);
void __asan_load4_noabort(FAR void *addr);
void __asan_store4_noabort(FAR void *addr);
void __asan_load2_noabort(FAR void *addr);
void __asan_store2_noabort(FAR void *addr);
void __asan_load1_noabort(FAR void *addr);
void __asan_store1_noabort(FAR void *addr);
void __asan_loadN(FAR void *addr, size_t size);
void __asan_storeN(FAR void *addr, size_t size);
void __asan_load16(FAR void *addr);
void __asan_store16(FAR void *addr);
void __asan_load8(FAR void *addr);
void __asan_store8(FAR void *addr);
void __asan_load4(FAR void *addr);
void __asan_store4(FAR void *addr);
void __asan_load2(FAR void *addr);
void __asan_store2(FAR void *addr);
void __asan_load1(FAR void *addr);
void __asan_store1(FAR void *addr);影响及注意事项
使能KASAN后,会让程序明显变慢,如果这时使能了看门狗,很可能导致看门狗复位,实际使用中建议同时关闭看门狗。
使用ASAN会增加额外1/8的内存消耗用于shadow memory。
ASAN通过每8字节对应1字节的映射的方式建立影子内存区。
相同功能下,开启asan后,代码rom大小多了约20%-30%(每个对内存访问的指令前都会增加一个跳转指令),data没有变化,因为heap大小是自适应的,实际应该多消耗1/32的heap空间。如果以后功能增强,资源占用会变化。
结果解读
测试演示:
如下所示,测试代码第一条printf未越界,第二条pritnf越界立即上报并打印PANIC信息,通过backtrace信息可以直接定位到越界访问处。
int main(int argc, FAR char *argv[])
{
char *p = malloc(1024);
printf("Hello, World!!,%d\n", p[1023]);
printf("Hello, World!!,%d\n", p[1024]);
return 0;
}利用printf()分别访问已申请的p[1023]和未申请的空间p[1024]

使用注意
- M55核心,memset 使用 v8.1m 里的 vstrb 指令,不是传统意义的 LDR 或 STR,因此 asan 检查无法插入,故不会针对 memset 的越界进行报错提醒。
- asan 以内存管理分配器实际 alloc 的内存大小作为是否越界判断,故实际分配 size 可能大于申请 size,因此 asan 检测可能出现延迟触发报错提醒的情况。(例如申请大小为10,实际可能在写超到 index 24才报错)
实现原理简介
KASAN原理
进程的虚拟内存空间被ASAN划分为2个独立的部分:
-
主应用内存区 (Mem): 专门提供给普通APP代码内存使用区。
-
影子内存区 (Shadow): 该内存区仅ASAN感知,影子顾名思义是指该内存区与主应用内存区存在一种类似“影子”的对应关系。ASAN在将主内存区的一个字节标记为“中毒”状态时,也会在对应的影子内存区写一个特殊值,该值称为“影子值”。
这两个内存区需要精心划分,确保可以快速从主应用内存区映射到影子内存区(MemToShadow)。
主应用内存与影子内存Shadow bytes映射
KASAN将8字节的主应用区内存映射为1bit影子区内存。
针对任何8字节对齐的主应用区内存,总共有1种不同的影子内存值:
8字节中的有一个字节未“中毒”(可访问的),影子值是1。
8字节中的全部字节都“中毒”(不可访问的),影子值是0。
malloc原理
#include "mm_heap/mm.h"
struct mm_freenode_s
{
#if CONFIG_MM_BACKTRACE >= 0
pid_t pid; /* The pid for caller */
# if CONFIG_MM_BACKTRACE > 0
FAR void *backtrace[CONFIG_MM_BACKTRACE]; /* The backtrace buffer for caller */
# endif
#endif
mmsize_t size; /* Size of this chunk */
mmsize_t preceding; /* Size of the preceding chunk */
FAR struct mm_freenode_s *flink; /* Supports a doubly linked list */
FAR struct mm_freenode_s *blink;
};malloc()有两种申请内存的方式。
brk()
小于128KB的内存,往往是通过brk()申请,malloc 通过 brk() 方式申请的内存,free 释放内存的时候,并不会把内存归还给操作系统,而是缓存在 malloc 的内存池中,待下次使用;
mmap()
大于128KB的内存,一般是通过mmap()申请,malloc 通过 mmap() 方式申请的内存,free 释放内存的时候,会把内存归还给操作系统,内存得到真正的释放。
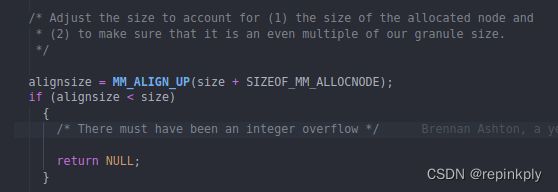
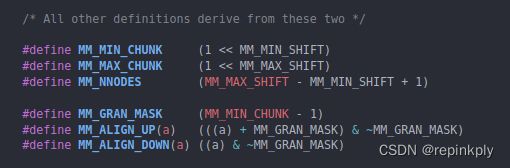
定义于 mm_hap/mm.h的相关宏
内容参考
利用ASAN在单片机上查找内存错误(英文)
tinyK22_FreeRTOS_ASAN
KASAN实现原理
kasan部分源码
Armv8.1-M architecture: PACBTI extensions - Architectures and Processors blog - Arm Community blogs - Arm Community