【Pytorch】pytorch中保存模型的三种方式
【Pytorch】pytorch中保存模型的三种方式
文章目录
- 【Pytorch】pytorch中保存模型的三种方式
-
- 1. torch保存模型相关的api
-
- 1.1 torch.save()
- 1.2 torch.load()
- 1.3 torch.nn.Module.load_state_dict()
- 1.4 什么是state_dict()
-
- 1.4. 1 举个例子
- 2. pytorch模型文件后缀
- 3. 存储整个模型
-
- 3.1 直接保存整个模型
- 3.2 直接加载整个模型
- 4. 只保存模型的权重
-
- 4.1 保存模型权重
- 4.2 读取模型权重
- 5. 使用Checkpoint保存中间结果
-
- 5.1 保存Checkpoint
- 5.2 加载Checkpoint
- Reference
1. torch保存模型相关的api
1.1 torch.save()
torch.save(obj, f, pickle_module=pickle, pickle_protocol=DEFAULT_PROTOCOL, _use_new_zipfile_serialization=True)
参考自https://pytorch.org/docs/stable/generated/torch.save.html#torch-save

torch.save()的功能是保存一个序列化的目标到磁盘当中,该函数使用了Python中的pickle库用于序列化,具体参数的解释如下
| 参数 | 功能 |
|---|---|
| obj | 需要保存的对象 |
| f | 指定保存的路径 |
| pickle_module | 用于 pickling 元数据和对象的模块 |
| pickle_protocol | 指定 pickle protocal 可以覆盖默认参数 |
常见用法
# dirctly save entiry model
torch.save('model.pth')
# save model'weights only
torch.save(model.state_dict(), 'model_weights.pth')
# save checkpoint
checkpint = {
'model_state_dict': model.state_dict(),
'optimizer_state_dict': optimizer.state_dict(),
'loss': loss,
'epoch': epoch
}
torch.save(checkpoint, 'checkpoint_path.pth')
1.2 torch.load()
torch.load(f, map_location=None, pickle_module=pickle, *, weights_only=False, mmap=None, **pickle_load_args)
参考自https://pytorch.org/docs/stable/generated/torch.load.html#torch-load
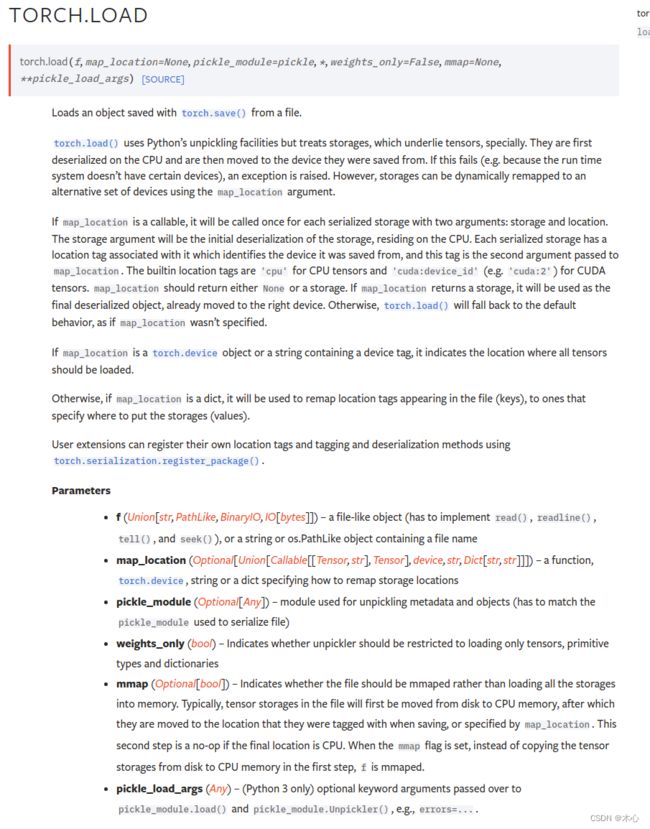
torch.load()的功能是加载模型,使用python中的unpickle工具来反序列化对象,并且加载到对应的设备上,具体的参数解释如下
| 参数 | 功能 |
|---|---|
| f | 对象的存放路径 |
| map_location | 需要映射到的设备 |
| pickle_module | 用于 unpickling 元数据和对象的模块 |
常见用法
# specify the device to use
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
# load entiry model to cuda if available
model = torch.load('whole_model.pth', map_location=device)
# load model's weight to cuda if available
model.load_state_dict(torch.load('model_weights.pth'), map_location=device)
# load checkpoint
checkpoint = torch.load('checkpoint_path.pth', map_location=device)
# checkpoint加载出来就像个字典,预先保存的是否放置了什么内容,加载之后就可以这样来获取
loss = checkpoint['loss']
epoch = chekpoint['epoch']
model.load_state_dict(checkpoint['model_state_dict']
optimizer.load_state_dict(checkpoint['optimizer_state_dict']
1.3 torch.nn.Module.load_state_dict()
torch.nn.Module.load_state_dict(state_dict, strict=True, assign=False)
参考自https://pytorch.org/docs/stable/generated/torch.nn.Module.html#torch.nn.Module.load_state_dict
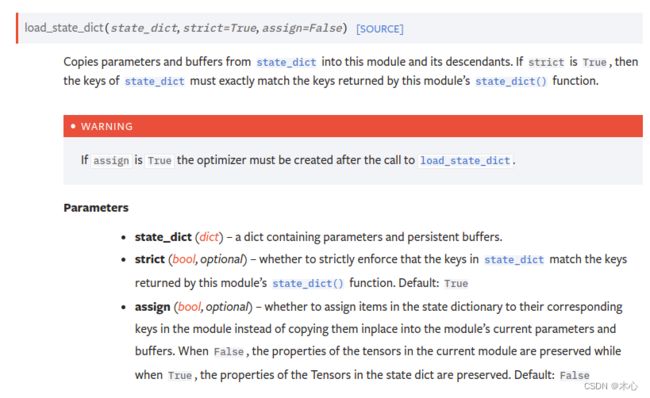
torch.nn.Module.load_state_dict()将参数和缓冲区从 state_dict 复制到此模块及其后代中。 如果 strict 为 True,则 state_dict 的键必须与该模块的 state_dict() 函数返回的键完全匹配。具体的参数描述如下
| 参数 | 功能 |
|---|---|
| state_dict | 保存parameters和persistent buffers的字典 |
| strict | 是否强制要求state_dict中的key和model.state_dict返回的key严格一致 |
1.4 什么是state_dict()
torch.nn.Module.state_dict()
参考自https://pytorch.org/docs/stable/generated/torch.nn.Module.html#torch.nn.Module.state_dict
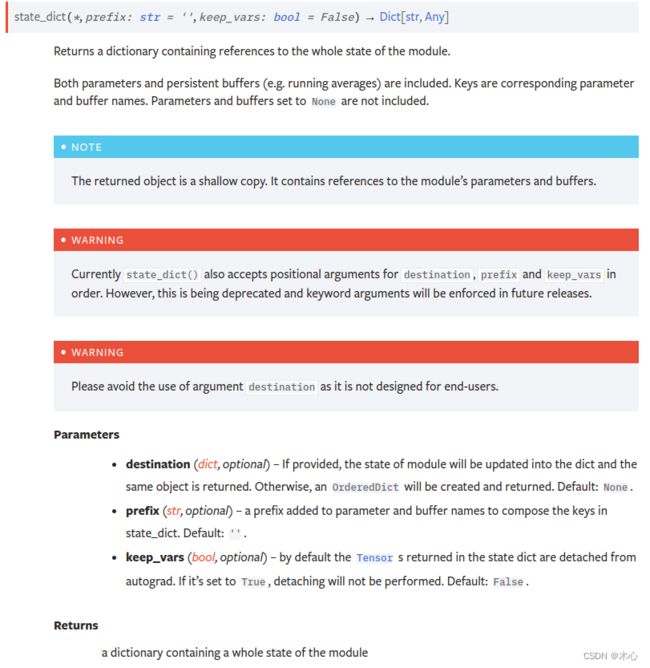
其实state_dict可以理解为一种简单的Python Dictionary,其功能是将每层之间的参数进行一一映射并且存储在python的数据类型字典中。因此state_dict可以轻松地进行修改、保存等操作。
除了torch.nn.Module拥有state_dict()方法之外,torch.optim.Optimizer也具有state_dict()方法。如下所示
torch.optim.Optimizer.state_dict()
参考自https://pytorch.org/docs/stable/generated/torch.optim.Optimizer.state_dict.html
1.4. 1 举个例子
import torch
import torch.nn as nn
import torch.nn.functional as F
import torch.optim as optim
class SimpleModel(nn.Module):
def __init__(self, input_size, output_size):
super(SimpleModel, self).__init__()
self.fc1 = nn.Linear(input_size, 100)
self.fc2 = nn.Linear(100, output_size)
def forward(self, x):
x = F.relu(self.fc1(x))
return self.fc2(x)
if __name__ == "__main__":
model = SimpleModel(10, 2)
optimizer = optim.Adam(model.parameters(), lr=0.001)
print("Check Model's State Dict:")
for key, value in model.state_dict().items():
print(key, "\t", value.size())
print("Check Optimizer's State Dict:")
for key, value in optimizer.state_dict().items():
print(key, "\t", value)
输出的结果如下
Check Model's State Dict:
fc1.weight torch.Size([100, 10])
fc1.bias torch.Size([100])
fc2.weight torch.Size([2, 100])
fc2.bias torch.Size([2])
Check Optimizer's State Dict:
state {}
param_groups [{'lr': 0.001, 'betas': (0.9, 0.999), 'eps': 1e-08, 'weight_decay': 0, 'amsgrad': False, 'maximize': False, 'foreach': None, 'capturable': False, 'differentiable': False, 'fused': None, 'params': [0, 1, 2, 3]}]
2. pytorch模型文件后缀
常用的torch模型文件后缀有.pt、.pth,这是最常见的PyTorch模型文件后缀,表示模型的权重、结构和状态字典(state_dict)都被保存在其中。
torch.save(model.state_dict(), 'model_weights.pth')
torch.save(model, 'full_model.pt')
还有检查点后缀如.ckpt、.checkpoint,这些后缀常被用于保存模型的检查点,包括权重和训练状态等。它们也可以表示模型的中间状态,以便在训练期间从中断的地方继续训练。
checkpoint = {
'model_state_dict': model.state_dict(),
'optimizer_state_dict': optimizer.state_dict(),
'epoch': epoch,
# 其他信息
}
torch.save(checkpoint, 'model_checkpoint.ckpt')
还有其他跨框架的数据结构例如.h5,PyTorch的模型也可以保存为HDF5文件格式用于跨框架的数据交换,可以使用h5py库来进行读写
import h5py
with h5py.File('model.h5', 'w') as f:
# 将模型参数逐一保存到HDF5文件
for name, param in model.named_parameters():
f.create_dataset(name, data=param.numpy())
3. 存储整个模型
可以直接使用torch.save()和torch.load()来加载和保存整个模型到文件中,这种方式保存了模型的所有权重、架构及其其他相关信息,即使不知道模型的结构也能够直接通过权重文件来加载模型
3.1 直接保存整个模型
import torch
import torch.nn as nn
import torch.nn.functional as F
import torch.optim as optim
import os
class SimpleModel(nn.Module):
def __init__(self, input_size, output_size):
super(SimpleModel, self).__init__()
self.fc1 = nn.Linear(input_size, 256)
self.fc2 = nn.Linear(256, 256)
self.fc3 = nn.Linear(256, output_size)
def forward(self, x):
x = F.relu(self.fc1(x))
x = F.relu(self.fc2(x))
return self.fc3(x)
if __name__ == "__main__":
model = SimpleModel(10, 2)
# specify the save path
url = os.path.dirname(os.path.realpath(__file__)) + '/models/'
# 如果路径不存在则创建
if not os.path.exists(url):
os.makedirs(url)
# specify the model save name
model_name = 'simple_model.pth'
# save the model to file
torch.save(model, url + model_name)
我们直接将模型保存到了当前文件夹下的./models文件夹中,
3.2 直接加载整个模型
由于我们已经保存了模型的所有相关信息,所以我们可以不知道模型的结构也能加载该模型,如下所示
import torch
import torch.nn as nn
import torch.nn.functional as F
import torch.optim as optim
import os
class SimpleModel(nn.Module):
def __init__(self, input_size, output_size):
super(SimpleModel, self).__init__()
self.fc1 = nn.Linear(input_size, 256)
self.fc2 = nn.Linear(256, 256)
self.fc3 = nn.Linear(256, output_size)
def forward(self, x):
x = F.relu(self.fc1(x))
x = F.relu(self.fc2(x))
return self.fc3(x)
if __name__ == "__main__":
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
# model = SimpleModel(10, 2)
# specify the save path
url = os.path.dirname(os.path.realpath(__file__)) + '/models/'
# 如果路径不存在则创建
if not os.path.exists(url):
os.makedirs(url)
# specify the model save name
model_name = 'simple_model.pth'
# load the model
if os.path.exists(url + model_name):
model = torch.load(url + model_name, map_location=device)
print("Success Load Model From:\n\t%s"%(url+model_name))
成功加载了模型
4. 只保存模型的权重
4.1 保存模型权重
利用前面提到的state_dict()方法来完成这一操作
import torch
import torch.nn as nn
import torch.nn.functional as F
import torch.optim as optim
import os
class SimpleModel(nn.Module):
def __init__(self, input_size, output_size):
super(SimpleModel, self).__init__()
self.fc1 = nn.Linear(input_size, 256)
self.fc2 = nn.Linear(256, 256)
self.fc3 = nn.Linear(256, output_size)
def forward(self, x):
x = F.relu(self.fc1(x))
x = F.relu(self.fc2(x))
return self.fc3(x)
if __name__ == "__main__":
# specify device
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
model = SimpleModel(10, 2)
# specify the save path
url = os.path.dirname(os.path.realpath(__file__)) + '/models/'
# 如果路径不存在则创建
if not os.path.exists(url):
os.makedirs(url)
# specify the model save name
model_name = 'simple_model_weights.pth'
torch.save(model.state_dict(), url + model_name)
我们直接将模型权重保存到了当前文件夹下的./models文件夹中,
4.2 读取模型权重
由于我们只保存了模型的权重信息,不知道模型的结构,所以必须要先实例化模型才行。
import torch
import torch.nn as nn
import torch.nn.functional as F
import torch.optim as optim
import os
class SimpleModel(nn.Module):
def __init__(self, input_size, output_size):
super(SimpleModel, self).__init__()
self.fc1 = nn.Linear(input_size, 256)
self.fc2 = nn.Linear(256, 256)
self.fc3 = nn.Linear(256, output_size)
def forward(self, x):
x = F.relu(self.fc1(x))
x = F.relu(self.fc2(x))
return self.fc3(x)
if __name__ == "__main__":
# specify device
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
# get model
model = SimpleModel(10, 2)
# specify the save path
url = os.path.dirname(os.path.realpath(__file__)) + '/models/'
# 如果路径不存在则创建
if not os.path.exists(url):
os.makedirs(url)
# specify the model save name
model_name = 'simple_model_weights.pth'
if os.path.exists(url + model_name):
model.load_state_dict(torch.load(url + model_name, map_location=device))
print("Success Load Model'weights From:\n\t%s"%(url+model_name))
5. 使用Checkpoint保存中间结果
5.1 保存Checkpoint
import torch
import torch.nn as nn
import torch.optim as optim
import numpy as np
import os
# 数据准备
x = torch.tensor(np.random.rand(100, 1), dtype=torch.float32)
y = 3 * x + 2 + 0.1 * torch.randn(100, 1)
# 定义模型
class SimpleLinearModel(nn.Module):
def __init__(self):
super(SimpleLinearModel, self).__init__()
self.linear = nn.Linear(1, 1)
def forward(self, x):
return self.linear(x)
if __name__=="__main__":
# specify device
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
# 实例化模型
model = SimpleLinearModel()
# 定义损失函数和优化器
criterion = nn.MSELoss()
optimizer = optim.SGD(model.parameters(), lr=0.01)
# 训练循环
num_epochs = 1000
checkpoint_interval = 100 # 保存检查点的间隔
url = os.path.dirname(os.path.realpath(__file__))+'/models/'
if not os.path.exists(url):
os.makedirs(url)
checkpoint_file = 'checkpoint.pth' # 检查点文件路径
for epoch in range(num_epochs):
# 前向传播
outputs = model(x)
loss = criterion(outputs, y)
# 反向传播和优化
optimizer.zero_grad()
loss.backward()
optimizer.step()
# 打印训练信息
if (epoch + 1) % checkpoint_interval == 0:
print(f'Epoch [{epoch+1}/{num_epochs}], Loss: {loss.item():.4f}')
# 保存检查点
checkpoint = {
'epoch': epoch + 1,
'model_state_dict': model.state_dict(),
'optimizer_state_dict': optimizer.state_dict(),
'loss': loss.item(),
}
torch.save(checkpoint, url+checkpoint_file)
5.2 加载Checkpoint
import torch
import torch.nn as nn
import torch.optim as optim
import numpy as np
import os
# 数据准备
x = torch.tensor(np.random.rand(100, 1), dtype=torch.float32)
y = 3 * x + 2 + 0.1 * torch.randn(100, 1)
# 定义模型
class SimpleLinearModel(nn.Module):
def __init__(self):
super(SimpleLinearModel, self).__init__()
self.linear = nn.Linear(1, 1)
def forward(self, x):
return self.linear(x)
if __name__=="__main__":
# specify device
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
# 实例化模型
model = SimpleLinearModel()
# 定义损失函数和优化器
criterion = nn.MSELoss()
optimizer = optim.SGD(model.parameters(), lr=0.01)
# 训练循环
num_epochs = 1000
checkpoint_interval = 100 # 保存检查点的间隔
url = os.path.dirname(os.path.realpath(__file__))+'/models/'
if not os.path.exists(url):
os.makedirs(url)
checkpoint_file = 'checkpoint.pth' # 检查点文件路径
# load from checkpoint
checkpoint = torch.load(url+checkpoint_file)
for key, value in checkpoint.items():
print(key, '-->', value)
model.load_state_dict(checkpoint['model_state_dict'])
optimizer.load_state_dict(checkpoint['optimizer_state_dict'])
epoch = checkpoint['epoch']
loss = checkpoint['loss']
print('Loaded checkpoint from epoch %d. Loss %f' % (epoch, loss))
输出如下
loss --> 0.01629752665758133
(test_ros_python) sjh@sjhR9000X:~/Documents/python_draft$ cd /home/sjh/Documents/python_draft ; /usr/bin/env /home/sjh/anaconda3/envs/metaRL/bin/python /home/sjh/.vscode/extensions/ms-python.python-2023.18.0/pythonFiles/lib/python/debugpy/adapter/../../debugpy/launcher 40897 -- /home/sjh/Documents/python_draft/check_checkpoint.py
epoch --> 1000
model_state_dict --> OrderedDict([('linear.weight', tensor([[2.6938]])), ('linear.bias', tensor([2.1635]))])
optimizer_state_dict --> {'state': {0: {'momentum_buffer': None}, 1: {'momentum_buffer': None}}, 'param_groups': [{'lr': 0.01, 'momentum': 0, 'dampening': 0, 'weight_decay': 0, 'nesterov': False, 'maximize': False, 'foreach': None, 'differentiable': False, 'params': [0, 1]}]}
loss --> 0.01629752665758133
Loaded checkpoint from epoch 1000. Loss 0.016298
我们成功从断点处加载checkpoint, 可以再从这个断点处继续训练
Reference
参考一