SVO2.0 安装编译
SVO2-OPEN: https://github.com/uzh-rpg/rpg_svo_pro_open
git挂梯子
https://blog.csdn.net/qq_33349365/article/details/101514412
如果各位终端无法挂梯子,直接下载我在码云上整理好的代码:
第一种编译方式:
git clone https://gitee.com/ma_yu_armor/svo2_build.git第二种编译方式:
git clone -b method2 https://gitee.com/ma_yu_armor/svo2_build.gitInstall
The code has been tested on
-
Ubuntu 18.04 with ROS Melodic
-
Ubuntu 20.04 with ROS Melodic
Install dependencies
Install catkin tools and vcstools if you haven't done so before. Depending on your operating system, run
# For Ubuntu 18.04 + Melodic
sudo apt-get install python-catkin-tools python-vcstoolor
# For Ubuntu 20.04 + Noetic
sudo apt-get install python3-catkin-tools python3-vcstool python3-osrf-pycommonInstall system dependencies and dependencies for Ceres Solver
# system dep.
sudo apt-get install libglew-dev libopencv-dev libyaml-cpp-dev
# Ceres dep.
sudo apt-get install libblas-dev liblapack-dev libsuitesparse-devClone and compile
Create a workspace and clone the code (ROS-DISTRO=melodic/noetic):
意思是将下面出现的
-
创建工作空间
mkdir svo_ws && cd svo_ws-
catkin相关配置
# see below for the reason for specifying the eigen path
catkin config --init --mkdirs --extend /opt/ros/ --cmake-args -DCMAKE_BUILD_TYPE=Release -DEIGEN3_INCLUDE_DIR=/usr/include/eigen3 -
下载原码
cd src
git clone [email protected]:uzh-rpg/rpg_svo_pro_open.git
vcs-import < ./rpg_svo_pro_open/dependencies.yaml
#这样可以不编译,如果要打开全局重定位功能需要删除,后面有交代,先这么写
touch minkindr/minkindr_python/CATKIN_IGNORE注意:git clone [email protected]:uzh-rpg/rpg_svo_pro_open.git...会失败,原因是使用git@...方式克隆需要私钥,人生苦短,不用配置,用https://github.com/uzh-rpg/rpg_svo_pro_open.git 代替。同理后面的...vcs-import < ./rpg_svo_pro_open/dependencies.yaml意思是clone dependencies.yaml里面罗列的地址的一系列库,但是打开会发现也是用git@写的,将地址按如下方式替换:
repositories:
catkin_simple:
type: git
#url: [email protected]:catkin/catkin_simple.git~~
url: https://github.com/catkin/catkin_simple.git
version: master
cmake_external_project_catkin:
type: git
#url: [email protected]:zurich-eye/cmake_external_project_catkin.git~~
url: https://github.com/zurich-eye/cmake_external_project_catkin.git
version: master
......将这个文件复制出来(置于src/中),删除其他文件,重新执行命令。终端需要挂梯子!!!
如果实在不行,可以到我的gitee上下载(见开头),里面包含了所有库(包括后面要用的gtsam)
git clone https://github.com/uzh-rpg/rpg_svo_pro_open.git
vcs-import < dependencies.yaml-
继续安装
# vocabulary for place recognition 这句不需要代理,新开终端,下完关掉
cd rpg_svo_pro_open/svo_online_loopclosing/vocabularies && ./download_voc.sh
cd ../../..在开始编译之前,可以发现src/dbow2_catkin/CmakeList.txt中这样写道(同样的需要修改git地址):
ExternalProject_Add(dbow2_src
#GIT_REPOSITORY [email protected]:dorian3d/DBoW2.git
GIT_REPOSITORY https://github.com/dorian3d/DBoW2.git
CMAKE_ARGS -DCMAKE_INSTALL_PREFIX=${CATKIN_DEVEL_PREFIX}
BUILD_COMMAND CXXFLAGS=-i${CATKIN_DEVEL_PREFIX}/include make
INSTALL_COMMAND make install
)至此安装工作完成
编译
这里有两种编译方式,建议按照顺序都尝试一下,这样一旦出问题,更好解决。
1. 直接编译 Build without the global map (front-end + sliding window back-end + loop closure/pose graph)
catkin build -j6Errors
-
缺少两个库
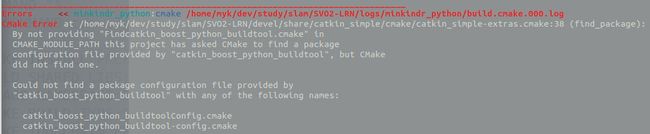

缺少库:
cd src/ git clone https://github.com/ethz-asl/catkin_boost_python_buildtool.git git clone https://github.com/ethz-asl/numpy_eigen.git
-
Opencv3

该开源项目是基于Opencv3写的,本人电脑里装了4(ros自带3),故在src/rpg_svo_open/svo_ros/CmakeList.txt中,修改如下内容:
find_package(catkin_simple REQUIRED) find_package(rostest REQUIRED) catkin_simple() #find_package(OpenCV REQUIRED) #会默认找到Opencv4 find_package(OpenCV 3 REQUIRED) #指定OpenCv3
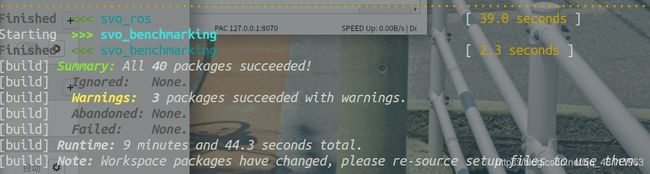
至此编译通过:

小编这里共38个包。
2.第二种编译方式Build with the global map using iSAM2 (all functionalities)
-
首先把上面提到的阻止svo_global_map编译的CATKIN_IGNORE删除
rm rpg_svo_pro_open/svo_global_map/CATKIN_IGNORE并且在svo_cmake/cmake/Modules/SvoSetup.cmake中:
SET(USE_GLOBAL_MAP TRUE)-
克隆GTSAM (与其他pkg在同一目录内)
git clone --branch 4.0.3 https://github.com/borglab/gtsam.git-
修改cmakelist
# 1. gtsam/CMakelists.txt: use system Eigen
-option(GTSAM_USE_SYSTEM_EIGEN "Find and use system-installed Eigen. If 'off', use the one bundled with GTSAM" OFF)
+option(GTSAM_USE_SYSTEM_EIGEN "Find and use system-installed Eigen. If 'off', use the one bundled with GTSAM" ON)
# 2. gtsam/cmake/GtsamBuildTypes: disable avx instruction set
# below the line `list_append_cache(GTSAM_COMPILE_OPTIONS_PUBLIC "-march=native")`
list_append_cache(GTSAM_COMPILE_OPTIONS_PUBLIC "-mno-avx")注意两处更改是不同的文件(见注释)。
ERROR
-
gtsam 与boost

这种boost报错的问题一般大家是不会有的,因为我之前装了很多boost版本才会导致这样的问题。将boost全部删除干净,使用ros-melodic中自带的boost(version 1.65)即可。但是某些小伙伴可能会出现找不到boost的情况。首先检查是否安装。
sudo apt-get install libboost-all-dev如果问题还不能够解决,那就是gtsam在找boost的时候路径出了问题。它默认到/usr/local/中去找,然而ros中的boost位于/usr中。与gtsam的CmakeList中指定boost路径如下(大约在165行):
# Store these in variables so they are automatically replicated in GTSAMConfig.cmake and such.
set(BOOST_FIND_MINIMUM_VERSION 1.43)
set(BOOST_FIND_MINIMUM_COMPONENTS serialization system filesystem thread program_options date_time timer chrono regex)
set(BOOST_ROOT "/usr/include") #加上这行
set(BOOST_LIBRARYDIR "/usr/include/lib") #和这行
#add_definitions(-DBOOST_ERROR_CODE_HEADER_ONLY)#myk终于编译通过!
如果觉得文章内容有帮助的话,点赞关注评论转发吧。 (请喝奶茶也是可以的)
