M2DGR数据集在一些SLAM框架上的配置与运行:ORB-SLAM系列、VINS-Mono、LOAM系列、FAST-LIO系列、hdl_graph_slam
文章目录
- 一、M2DGR数据集
- 二、ORB-SLAM2
-
- 2.1 配置参数
- 2.2 单目
- 三、ORB-SLAM3
-
- 3.1 配置参数
- 3.2 运行单目+IMU
- 四、VINS-Mono
-
- 4.1 配置参数
- 4.2 运行单目+IMU
- 五、DM-VIO
-
- 5.1 安装
- 5.2 配置运行
- 六、A-LOAM
- 七、LeGO-LOAM
- 八、LIO-SAM
-
- 8.1 配置参数
- 8.2 运行
- 九、LVI-SAM
-
- 9.1 配置参数
- 9.2 运行
- 十、LINS
-
- 10.1 安装
- 10.2 配置参数
- 10.3 运行
- 十一、FAST-LIO2
-
- 11.1 安装
- 11.2 配置参数
- 11.3 运行
- 十二、FAST-LIVO
-
- 12.1 安装
- 12.2 运行
- 12.3 R3LIVE
- 十三、Faster-LIO
-
- 13.1 Faster-LIO的安装
- 13.2 配置参数
- 13.3 运行
- 十四、hdl_graph_slam
-
- 14.1 安装
- 14.2 纯激光
- 十五、定位结果质量评估与比较
为了说明以上这些SLAM框架的测试与数据集适配,以M2DGR数据集为例进行各自的配置与运行,方便我以后适配自己的数据集,运行的SLAM框架包括:ORB-SLAM2、ORB-SLAM3、VINS-Mono、A-LOAM、LeGO-LOAM、LIO-SAM、LVI-SAM、FAST-LIO2、FAST-LIVO、Faster-LIO、hdl_graph_slam。实验基于Ubuntu20.04,其中ORB、VINS-Mono、和LOAM系列的安装参考我以前的博客,有详细的安装方法,其他的框架在后面会简单介绍一下安装方法
由于学的还不够深入,主要目的就是记录参数配置方法,部分参数配置可能有错误而导致数据跑的有问题,如有发现错误或问题,欢迎讨论,我来修改
一、M2DGR数据集
M2DGR是由具有完整传感器套件的地面机器人收集的新型大规模数据集,传感器套件包括六个鱼眼和一个指向天空的RGB相机、红外相机、事件相机、视觉惯性传感器(VI-传感器)、惯性测量单元(IMU)、LiDAR、消费级全球导航卫星系统(GNSS)接收器和具有实时动态(RTK)信号的GNSS-IMU导航系统。 所有这些传感器都经过了良好的标定和同步,它们的数据被同时记录下来。通过运动捕捉设备、激光3D跟踪器和RTK获得轨迹真值。 该数据集包括36个序列(约1 TB),这些序列是在包括室内和室外环境在内的不同场景中捕获的。
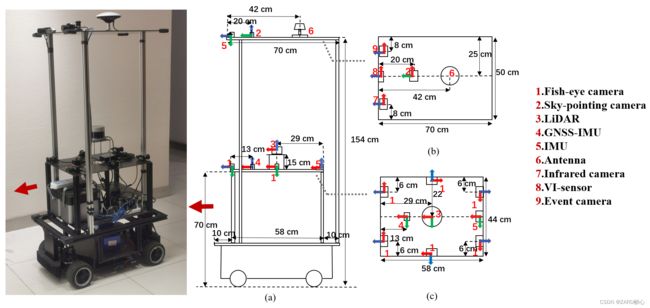
传感器参数如下:
- LIDAR Velodyne VLP-32C, 360 Horizontal Field of View (FOV),-30 to +10 vertical FOV,10Hz,Max Range 200 m,Range Resolution 3 cm, Horizontal Angular Resolution 0.2°.
- RGB Camera FLIR Pointgrey CM3-U3-13Y3C-CS,fish-eye lens,1280*1024,190 HFOV,190 V-FOV, 15 Hz
- GNSS Ublox M8T, GPS/BeiDou, 1Hz
- Infrared Camera,PLUG 617,640*512,90.2 H-FOV,70.6 V-FOV,25Hz;
- V-I Sensor,Realsense d435i,RGB/Depth 640*480,69H-FOV,42.5V-FOV,15Hz;IMU 6-axix, 200Hz
- Event Camera Inivation DVXplorer, 640*480,15Hz;
- IMU,Handsfree A9,9-axis,150Hz;
- GNSS-IMU Xsens Mti 680G. GNSS-RTK,localization precision 2cm,100Hz;IMU 9-axis,100 Hz;
- Laser Scanner Leica MS60, localization 1mm+1.5ppm
- Motion-capture System Vicon Vero 2.2, localization accuracy 1mm, 50 Hz;
后面我们要配置参数,参考标定文件calibration_results.txt,rosbag序列的各数据话题如下:
- LIDAR:
/velodyne_points - RGB Camera:
/camera/left/image_raw/compressed,
/camera/right/image_raw/compressed,
/camera/third/image_raw/compressed,
/camera/fourth/image_raw/compressed,
/camera/fifth/image_raw/compressed,
/camera/sixth/image_raw/compressed,
/camera/head/image_raw/compressed - GNSS Ublox M8T:
/ublox/aidalm,
/ublox/aideph,
/ublox/fix,
/ublox/fix_velocity,
/ublox/monhw,
/ublox/navclock,
/ublox/navpvt,
/ublox/navsat,
/ublox/navstatus,
/ublox/rxmraw - Infrared Camera:
/thermal_image_raw - V-I Sensor:
/camera/color/image_raw/compressed,/camera/imu - Event Camera:
/dvs/events,/dvs_rendering/compressed - IMU:
/handsfree/imu
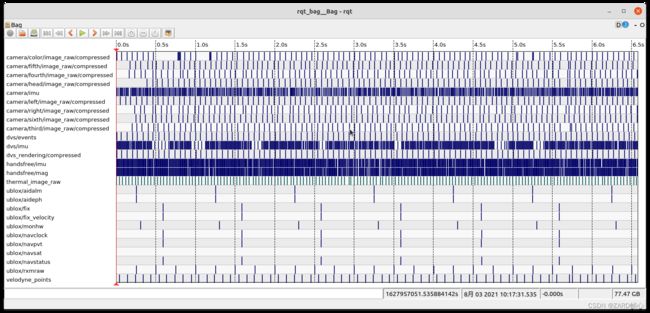
使用street_02.bag测试各个代码,我们首先通过rqt_bag命令将bag进行可视化,可以看到此数据的时间同步不太好
roscore
rqt_bag street_02.bag
二、ORB-SLAM2
2.1 配置参数
在Examples/Monocular/文件夹中添加参数文件M2DGR.yaml,仿照Examples/Monocular/TUM1.yaml文件修改参数,主要是修改相机内参,其余参数根据需要调整
# Camera calibration and distortion parameters (OpenCV)
Camera.fx: 617.971050917033
Camera.fy: 616.445131524790
Camera.cx: 327.710279392468
Camera.cy: 253.976983707814
Camera.k1: -0.28340811
Camera.k2: 0.07395907
Camera.p1: 0.00019359
Camera.p2: 1.76187114e-05
Camera.width: 640
Camera.height: 480
# Camera frames per second
Camera.fps: 15.0
2.2 单目
根据上述图像消息,单目ros_mono.cc文件的订阅:
//ros::Subscriber sub = nodeHandler.subscribe("/camera/image_raw", 1, &ImageGrabber::GrabImage,&igb);
// 替换为:
ros::Subscriber sub = nodeHandler.subscribe("/camera/color/image_raw", 1, &ImageGrabber::GrabImage,&igb);
重新编译ros节点
./build_ros.sh
打开四个终端,分别运行
roscore
#ORB_SLAM2目录下打开终端,运行ORB-SLAM2
rosrun ORB_SLAM2 Mono Vocabulary/ORBvoc.txt Examples/Monocular/M2DGR.yaml
# **注意**:bag中的图像为压缩格式,使用image_transport包将图像解压缩
rosrun image_transport republish compressed in:=/camera/color/image_raw raw out:=/camera/color/image_raw
# 在bag所在文件夹下打开终端,开始播放数据集:
rosbag play street_02.bag
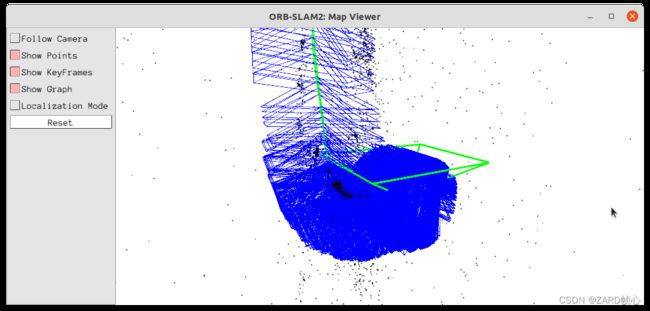
纯视觉的问题是初始化慢和特别容易跟踪丢失(运动过快、曝光以及动态物体干扰),另外单目的尺度漂移严重,完全失败

尺度变小挤一疙瘩啦!
三、ORB-SLAM3
3.1 配置参数
在Examples/Monocular-Inertial/文件夹中添加参数文件UrbanNav.yaml,仿照Examples/Monocular-Inertial/EuRoC.yaml文件,根据zed2_intrinsics.yaml、xsens_imu_param.yaml和extrinsic.yaml文件修改参数,主要是修改相机和IMU内参以及联合标定,其余参数根据需要调整
Camera.type: "PinHole"
# Camera calibration and distortion parameters (OpenCV)
Camera.fx: 617.971050917033
Camera.fy: 616.445131524790
Camera.cx: 327.710279392468
Camera.cy: 253.976983707814
Camera.k1: 0.148000794688248
Camera.k2: -0.217835187249065
Camera.p1: 0.0
Camera.p2: 0.0
Camera.width: 640
Camera.height: 480
# Camera frames per second
Camera.fps: 15.0
# Color order of the images (0: BGR, 1: RGB. It is ignored if images are grayscale)
Camera.RGB: 1
# Transformation from camera to body-frame (imu)
Tbc: !!opencv-matrix
rows: 4
cols: 4
dt: f
data: [0.0, 0.0, 1.0, 0.57711,
-1.0, 0.0, 0.0, -0.00012,
0.0, -1.0, 0.0, 0.83333,
0.0, 0.0, 0.0, 1.0]
# IMU noise
IMU.NoiseGyro: 2.1309311394972831e-02 #1.6968e-04
IMU.NoiseAcc: 1.2820343288774358e-01 #2.0e-3
IMU.GyroWalk: 3.6603917782528627e-04
IMU.AccWalk: 1.3677912958097768e-02
IMU.Frequency: 150
3.2 运行单目+IMU
将ros_mono_inertial.cc的IMU与图像消息订阅修改为:
// ros::Subscriber sub_imu = n.subscribe("/imu0", 1000, &ImuGrabber::GrabImu, &imugb);
// ros::Subscriber sub_img0 = n.subscribe("/cam0/image_raw", 100, &ImageGrabber::GrabImage,&igb);
ros::Subscriber sub_imu = n.subscribe("/handsfree/imu", 1000, &ImuGrabber::GrabImu, &imugb);
ros::Subscriber sub_img0 = n.subscribe("/camera/color/image_raw", 100, &ImageGrabber::GrabImage,&igb);
编译,然后运行
./build_ros.sh
# 配置环境:
source Examples/ROS
#ORB_SLAM3目录下打开终端,运行ORB-SLAM3
rosrun ORB_SLAM3 Mono_Inertial Vocabulary/ORBvoc.txt Examples/Monocular-Inertial/M2DGR.yaml
# **注意**:bag中的图像为压缩格式,使用image_transport包将图像解压缩
rosrun image_transport republish compressed in:=/camera/color/image_raw raw out:=/camera/color/image_raw
# 在bag所在文件夹下打开终端,开始播放数据集:
rosbag play street_02.bag
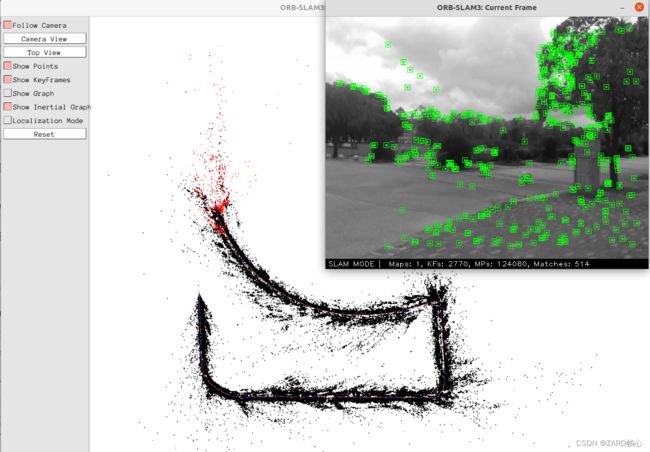
可以看到漂移十分严重,而且运行过程中也有尺度变化。没有分析出是何原因(猜测可能是/camera/color/image_raw时间戳跳变太严重),后面再作详细分析。总之运行失败
四、VINS-Mono
4.1 配置参数
在config文件夹中添加参数文件M2DGR.yaml,仿照config/euroc/euroc_config.yaml文件,根据my_params_camera.yaml文件修改参数,主要是修改图像以及IMU数据话题、结果输出路径、相机和IMU内参以及联合标定结果,其余参数根据需要调整
#common parameters
imu_topic: "/handsfree/imu"
image_topic: "/camera/color/image_raw"
output_path: "/home/zard/Downloads/VINS-Mono"
# camera model
model_type: PINHOLE
camera_name: camera
image_width: 640
image_height: 480
distortion_parameters:
k1: 0.148000794688248
k2: -0.217835187249065
p1: 0.0
p2: 0.0
projection_parameters:
fx: 617.971050917033
fy: 616.445131524790
cx: 327.710279392468
cy: 253.976983707814
#imu parameters The more accurate parameters you provide, the worse performance
acc_n: 1.2820343288774358e-01 # accelerometer measurement noise standard deviation. #0.2
gyr_n: 2.1309311394972831e-02 # gyroscope measurement noise standard deviation. #0.05
acc_w: 1.3677912958097768e-02 # accelerometer bias random work noise standard deviation. #0.02
gyr_w: 3.6603917782528627e-04 # gyroscope bias random work noise standard deviation. #4.0e-5
g_norm: 9.805 # gravity magnitude
# Extrinsic parameter between IMU and Camera.
estimate_extrinsic: 0 # 0 Have an accurate extrinsic parameters. We will trust the following imu^R_cam, imu^T_cam, don't change it.
# 1 Have an initial guess about extrinsic parameters. We will optimize around your initial guess.
# 2 Don't know anything about extrinsic parameters. You don't need to give R,T. We will try to calibrate it. Do some rotation movement at beginning.
#Rotation from camera frame to imu frame, imu^R_cam
extrinsicRotation: !!opencv-matrix
rows: 3
cols: 3
dt: d
data: [ 0.0, 0.0, 1.0,
-1.0, 0.0, 0.0,
0.0, -1.0, 0.0]
#Translation from camera frame to imu frame, imu^T_cam
extrinsicTranslation: !!opencv-matrix
rows: 3
cols: 1
dt: d
data: [0.57711, -0.00012, 0.83333]
仿照vins_estimator/launch/euroc.launch添加vins_estimator/launch/M2DGR.launch启动文件,修改参数文件路径,注意不要忘了将图像解压缩的命令
<arg name="config_path" default = "$(find feature_tracker)/../config/M2DGR.yaml" />
<node pkg="image_transport" type="republish" name="image_republish" args="compressed in:=/camera/color/image_raw raw out:=/camera/color/image_raw" output="screen" respawn="true"/>
4.2 运行单目+IMU
打开三个终端,source后再分别输入
# 运行feature_tracker节点和estimator节点, 订阅图像和IMU数据, 发布位姿, 3D特征点等消息给RVIZ显示
source devel/setup.bash
roslaunch vins_estimator M2DGR.launch
# rviz可视化节点
source devel/setup.bash
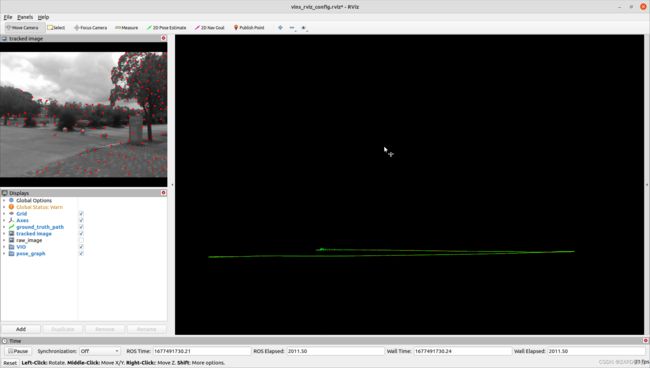
roslaunch vins_estimator vins_rviz.launch
# 在bag所在文件夹下打开终端,开始播放数据集:
rosbag play street_02.bag
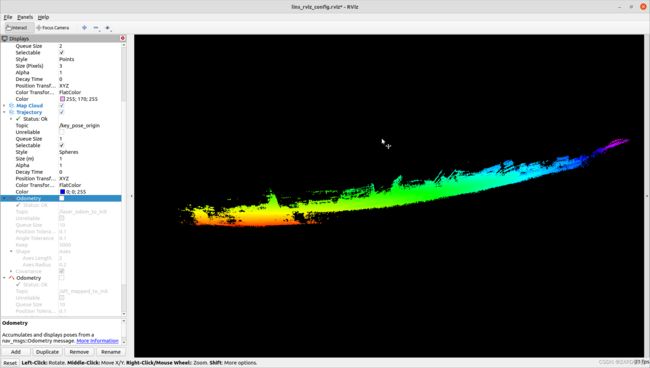
红色轨迹为前端里程计,绿色轨迹为局部优化和回环结果,此数据没有回环,有较大漂移(猜测也是图像时间戳的问题)

五、DM-VIO
5.1 安装
gtsam、OpenCV和pangolin的安装不赘述,直接编译DM-VIO:
git clone https://github.com/lukasvst/dm-vio.git
cd dm-vio
mkdir build && cd build
cmake ..
make -j8
编译完成后,在build/bin目录下,能看到可执行文件dmvio_dataset,接下来安装ros插件。随便进入一个目录,推荐是刚刚安装的dm-vio的一个子目录下:
git clone https://github.com/lukasvst/dm-vio-ros.git
为了能让这个插件找到刚刚编译的dm-vio.bashrc加上一个环境变量:
sudo gedit ~/.bashrc
# 在最后追加:
export DMVIO_BUILD=/YOURPATH/dm-vio/build
在CMakeLists.txt85行之后添加,不然编译的时候会因为找不到生成的msg格式而报错:
add_dependencies(${PROJECT_NAME}_node ${PROJECT_NAME}_generate_messages_cpp)
编译:
catkin_make
source devel/setup.bash
5.2 配置运行
首先要在config里加上M2DGR的相机模型:
echo -e "RadTan 617.971050917033 616.445131524790 327.710279392468 253.976983707814 0.148000794688248 -0.217835187249065 0.0 0.0\n640 480\nfull\n640 480\n" > M2DGR.txt
再仿照euroc.yaml配置参数文件M2DGR.yaml
accelerometer_noise_density: 1.2820343288774358e-01
gyroscope_noise_density: 2.1309311394972831e-02
accelerometer_random_walk: 1.3677912958097768e-02
gyroscope_random_walk: 3.6603917782528627e-04
integration_sigma: 0.316227
运行
roscore
source devel/setup.bash
rosrun dmvio_ros node calib=/PATH/M2DGR.txt settingsFile=/PATH/dm-vio/configs/M2DGR.yaml mode=1 nogui=0 preset=1 useimu=1 quiet=1 init_requestFullResetNormalizedErrorThreshold=0.8 init_pgba_skipFirstKFs=1
# **注意**:bag中的图像为压缩格式,使用image_transport包将图像解压缩
rosrun image_transport republish compressed in:=/camera/color/image_raw raw out:=/camera/color/image_raw
# 在bag所在文件夹下打开终端,开始播放数据集:
rosbag play street_02.bag /camera/color/image_raw:=cam0/image_raw /handsfree/imu:=imu0
但是运行不出来,没有反应,我不知为何,如果有人知道如何解决请在评论区告诉我,感谢!这里跑一下EuRoC数据吧
echo -e "458.654 457.296 367.215 248.375 -0.28340811 0.07395907 0.00019359 1.76187114e-05\n752 480\ncrop\n640 480\n" > camera.txt
rosrun dmvio_ros node calib=/PATH/camera.txt settingsFile=/PATH/dm-vio/configs/euroc.yaml mode=1 nogui=0 preset=1 useimu=1 quiet=1 init_requestFullResetNormalizedErrorThreshold=0.8 init_pgba_skipFirstKFs=1
rosbag play V1_01_easy.bag
六、A-LOAM
A-LOAM运行很简单,不需特别配置,LiDAR话题为/velodyne_points可直接运行:
source devel/setup.bash
roslaunch aloam_velodyne aloam_velodyne_VLP_32.launch
# 在bag所在文件夹下打开终端,开始播放数据集:
rosbag play street_02.bag
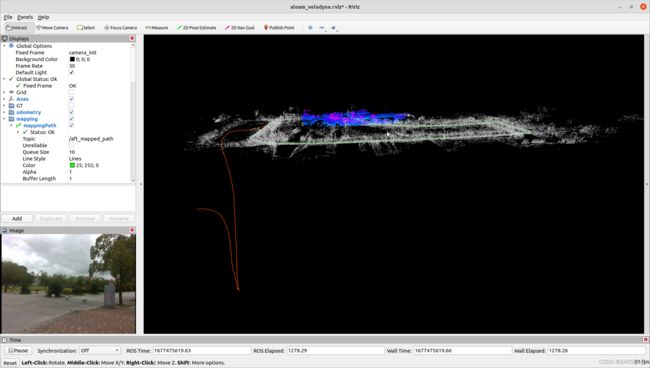
如下图所示,红色轨迹为前端里程计,绿色轨迹为局部优化结果,A-LOAM在此数据集上的效果还是十分好的

侧视图可以看到前端里程计漂移十分严重,说明后端局部优化的重要性
七、LeGO-LOAM
LeGO-LOAM运行也很简单,LiDAR话题为/velodyne_points,IMU话题/handsfree/imu更名为/imu/data:
source devel/setup.bash
roslaunch lego_loam run.launch
# 在bag所在文件夹下打开终端,开始播放数据集:
rosbag play street_02.bag --clock /handsfree/imu:=/imu/data
如下图所示,LeGO-LOAM有较大的漂移

八、LIO-SAM
8.1 配置参数
在config文件夹中添加参数文件config/params_street.yaml,仿照config/params.yaml文件,根xsens_imu_param.yaml和extrinsic.yaml文件修改参数,主要是修改LiDAR以及IMU数据话题、结果输出路径、IMU内参以及联合标定结果,其余参数根据需要调整
pointCloudTopic: "velodyne_points" # Point cloud data
imuTopic: "/handsfree/imu" # IMU data
# Export settings
savePCD: true # https://github.com/TixiaoShan/LIO-SAM/issues/3
savePCDDirectory: "~/Output/" # in your home folder, starts and ends with "/". Warning: the code deletes "LOAM" folder then recreates it. See "mapOptimization" for implementation
# Sensor Settings
sensor: velodyne # lidar sensor type, either 'velodyne' or 'ouster'
N_SCAN: 32 # number of lidar channel (i.e., 16, 32, 64, 128)
Horizon_SCAN: 1800 # lidar horizontal resolution (Velodyne:1800, Ouster:512,1024,2048)
downsampleRate: 1 # default: 1. Downsample your data if too many points. i.e., 16 = 64 / 4, 16 = 16 / 1
lidarMinRange: 1.0 # default: 1.0, minimum lidar range to be used
lidarMaxRange: 1000.0
# IMU Settings
imuAccNoise: 3.7686306102624571e-02
imuGyrNoise: 2.3417543020438883e-03
imuAccBiasN: 1.1416642385952368e-03
imuGyrBiasN: 1.4428407712885209e-05
# 上海位于北纬31°12′,重力加速度g的精确值为9.7940 m/s²。
imuGravity: 9.7940
imuRPYWeight: 0.01
# Extrinsics (lidar -> IMU)
# 给的是IMU -> lidar,但是旋转矩阵为单位阵,直接取负就行
extrinsicTrans: [0.27255, -0.00053, 0.17954]
extrinsicRot: [1, 0, 0,
0, 1, 0,
0, 0, 1]
extrinsicRPY: [1, 0, 0,
0, 1, 0,
0, 0, 1]
在launch/run.launch中修改参数文路径
<rosparam file="$(find lio_sam)/config/params_street.yaml" command="load" />
8.2 运行
source devel/setup.bash
roslaunch lio_sam run.launch
# 在bag所在文件夹下打开终端,开始播放数据集:
rosbag play street_02.bag
不知为何,LIO-SAM的结果看起来还不如A-LOAM,后面再作分析


九、LVI-SAM
9.1 配置参数
M2DGR的作者提供了LVI-SAM的参数配置文件module_sam.launch、my_params_camera.yaml、my_params_lidar.yaml,主要是要注意以下参数:
# my_params_camera.yaml
#common parameters
imu_topic: "/handsfree/imu"
image_topic: "/camera/color/image_raw"
# lidar to camera extrinsic
lidar_to_cam_tx: 0.27255
lidar_to_cam_ty: -0.00053
lidar_to_cam_tz: 0.17954
lidar_to_cam_rx: 0.0
lidar_to_cam_ry: 0.0
lidar_to_cam_rz: 0.0
# camera model
model_type: PINHOLE
camera_name: camera
# Mono camera config
image_width: 640
image_height: 480
distortion_parameters:
k1: 0.148000794688248
k2: -0.217835187249065
p1: 0
p2: 0
projection_parameters:
fx: 617.971050917033
fy: 616.445131524790
cx: 327.710279392468
cy: 253.976983707814
#imu parameters The more accurate parameters you provide, the worse performance
acc_n: 1.2820343288774358e-01 # accelerometer measurement noise standard deviation. #0.2
gyr_n: 2.1309311394972831e-02 # gyroscope measurement noise standard deviation. #0.05
acc_w: 1.3677912958097768e-02 # accelerometer bias random work noise standard deviation. #0.02
gyr_w: 3.6603917782528627e-04 # gyroscope bias random work noise standard deviation. #4.0e-5
g_norm: 9.805 # gravity magnitude
# Extrinsic parameter between IMU and Camera.
estimate_extrinsic: 0
extrinsicRotation: !!opencv-matrix
rows: 3
cols: 3
dt: d
data: [ 0.0, 0.0, 1.0,
-1.0, 0.0, 0.0,
0.0, -1.0, 0.0]
#Translation from camera frame to imu frame, imu^T_cam
extrinsicTranslation: !!opencv-matrix
rows: 3
cols: 1
dt: d
data: [0.57711, -0.00012, 0.83333]
#feature traker paprameters
freq: 20
# my_params_lidar.yaml
# Topics
pointCloudTopic: "velodyne_points" # Point cloud data
imuTopic: "handsfree/imu" # IMU data
# Heading
useImuHeadingInitialization: false # if using GPS data, set to "true"
# Export settings
savePCD: true # https://github.com/TixiaoShan/LIO-SAM/issues/3
savePCDDirectory: "~/Output/" # in your home folder, starts and ends with "/". Warning: the code deletes "LOAM" folder then recreates it. See "mapOptimization" for implementation
# Sensor Settings
N_SCAN: 32 # number of lidar channel (i.e., 16, 32, 64, 128)
Horizon_SCAN: 1800 # lidar horizontal resolution (Velodyne:1800, Ouster:512,1024,2048)
timeField: "time" # point timestamp field, Velodyne - "time", Ouster - "t"
downsampleRate: 1 # default: 1. Downsample your data if too many points. i.e., 16 = 64 / 4, 16 = 16 / 1
# IMU Settings
imuAccNoise: 3.7686306102624571e-02
imuGyrNoise: 2.3417543020438883e-03
imuAccBiasN: 1.1416642385952368e-03
imuGyrBiasN: 1.4428407712885209e-05
imuGravity: 9.805
# Extrinsics (lidar -> IMU)
extrinsicTrans: [0.27255, -0.00053,0.17954]
extrinsicRot: [1, 0, 0, 0, 1, 0, 0, 0, 1]
extrinsicRPY: [1, 0, 0, 0, 1, 0, 0, 0, 1]
<node pkg="image_transport" type="republish" name="image_republish" args="compressed in:=/camera/color/image_raw raw out:=/camera/color/image_raw" output="screen" respawn="true"/>
<rosparam file="$(find lvi_sam)/config/my_params_lidar.yaml" command="load" />
<param name="vins_config_file" type="string" value="$(find lvi_sam)/config/my_params_camera.yaml" />
9.2 运行
由于M2DGR使用的传感器坐标系与LVI-SAM的数据(实际上是LVI-SAM的IMU比较特殊)不同,M2DGR作者也提供了,需要在内部代码中稍作修改,修改如下:
- src/visual_odometry/visual_estimator/initial/initial_alignment.h
// n(n_in)
// {
// q_lidar_to_cam = tf::Quaternion(0, 1, 0, 0);
// q_lidar_to_cam_eigen = Eigen::Quaterniond(0, 0, 0, 1);
// }
n(n_in)
{
q_lidar_to_cam = tf::Quaternion(0, 0, 0, 1);
q_lidar_to_cam_eigen = Eigen::Quaterniond(1,0,0,0);
}
// tf::Quaternion q_odom_cam = tf::createQuaternionFromRPY(0, 0, M_PI) * (q_odom_lidar * q_lidar_to_cam);
tf::Quaternion q_odom_cam = tf::createQuaternionFromRPY(0, 0, M_PI / 2.0) * (q_odom_lidar * q_lidar_to_cam);
- src/visual_odometry/visual_estimator/utility/visualization.cpp
// tf::Quaternion q_cam_to_lidar(0, 1, 0, 0);
tf::Quaternion q_cam_to_lidar(0, 0, 0, 1);
// static tf::Transform t_odom_world = tf::Transform(tf::createQuaternionFromRPY(0, 0, M_PI), tf::Vector3(0, 0, 0));
static tf::Transform t_odom_world = tf::Transform(tf::createQuaternionFromRPY(0, 0, 0), tf::Vector3(0, 0, 0));
- src/visual_odometry/visual_feature/feature_tracker_node.cpp**
// 注释以下代码:
// pcl::PointCloud::Ptr laser_cloud_offset(new pcl::PointCloud());
// Eigen::Affine3f transOffset = pcl::getTransformation(L_C_TX, L_C_TY, L_C_TZ, L_C_RX, L_C_RY, L_C_RZ);
// pcl::transformPointCloud(*laser_cloud_in, *laser_cloud_offset, transOffset);
// *laser_cloud_in = *laser_cloud_offset;
修改完后重新编译:
cd ~/catkin_ws
catkin_make -j1
运行
source devel/setup.bash
roslaunch lvi_sam run.launch
# 在bag所在文件夹下打开终端,开始播放数据集:
rosbag play street_02.bag
与LIO-SAM一样,效果并不理想,看起来甚至不如LIO-SAM

十、LINS
10.1 安装
在已经安装ROS、gtsam和OpenCV的情况下:
cd ~/catkin_ws/src
git clone https://github.com/ChaoqinRobotics/LINS---LiDAR-inertial-SLAM.git
cd ..
catkin_make -j1
注意和LeGO-LOAM一样,第一次编译代码时,需要在“catkin_make”后面加上“-j1”来生成一些消息类型。以后的编译不需要“-j1”,并且如果和LeGO-LOAM放在一个功能包时消息名称会发生冲突(可以选择修改消息名称,也可以删除其中一个消息的编译功能包)
- 由于PCL版本1.10,将C++标准改为14:
#set(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -std=c++11 -O3")
set(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -std=c++14 -O3")
- 遇到错误:
error: ‘string’ in namespace ‘std::__cxx11’ does not name a type,将lins/src/lib/parameters.cpp中134和141行的函数参数中的std::__cxx11::string改成std::string - 四个类似的错误:
/usr/bin/ld: cannot find -lBoost::serialization,找不到lBoost的四个库,CMakeLists.txt添加:
find_package(Boost REQUIRED COMPONENTS timer thread serialization chrono)
10.2 配置参数
acc_n: 3.7686306102624571e-02
gyr_n: 2.3417543020438883e-03
acc_w: 1.1416642385952368e-03
gyr_w: 1.4428407712885209e-05
# extrinsic parameters
init_tbl: !!opencv-matrix
rows: 3
cols: 1
dt: d
data: [0.27255, -0.00053,0.17954]
init_rbl: !!opencv-matrix
rows: 3
cols: 3
dt: d
data: [1, 0, 0,
0, 1, 0,
0, 0, 1]
<arg name="config_path" default = "$(find lins)/config/exp_config/M2DGR.yaml" />
10.3 运行
source devel/setup.bash
roslaunch lins run_M2DGR.launch
# 在bag所在文件夹下打开终端,开始播放数据集:
rosbag play street_02.bag --clock /handsfree/imu:=/imu/data
运行时报错:[ERROR] [1677898050.385013867, 1627957054.444385592]: Error transforming odometry 'Odometry' from frame '/camera_init' to frame 'map',在lidar_mapping_node.cpp、transform_fusion_node.cpp、Estimator.cpp代码里搜索所有的/camera_init改成camera_init
竖直方向上漂移较大

十一、FAST-LIO2
FAST-LIO是香港大学火星实验室推出的高效 LiDAR 惯性里程计框架,使用紧密耦合的迭代扩展卡尔曼滤波器将 LiDAR 特征点与 IMU 数据融合,以允许在发生退化的快速运动、嘈杂或杂乱环境中进行稳健导航。相较第一代版本,第二代使用ikd-Tree增量映射,实现支持超过 100Hz 的 LiDAR 速率,并且支持更多的LiDAR和设备
11.1 安装
不需要修改源码,首先安装依赖项:
- ROS (melodic or noetic),安装方法参考我之前的博客
- glog:
sudo apt-get install libgoogle-glog-dev - eigen:
sudo apt-get install libeigen3-dev - pcl:
sudo apt-get install libpcl-dev - yaml-cpp:
sudo apt-get install libyaml-cpp-dev
(1)Livox-sdk安装
git clone https://github.com/Livox-SDK/Livox-SDK.git
cd Livox-SDK
cd build && cmake ..
make
sudo make install
(2)Livox_ros_driver安装
# 打开终端下执行下面的内容
mkdir ws_livox/src -p
# 打开配置文件
gedit ~/.bashrc
# 将下面的内容添加到文件最后
source ~/ws_livox/devel/setup.bash
# 将livox_ros_driver clone 到 ws_livox/src 下
cd ~/ws_livox/src
git clone https://github.com/Livox-SDK/livox_ros_driver.git
cd ..
catkin_make
source devel/setup.sh
(3)FAST_LIO安装
cd ~/ws_livox/src
git clone https://github.com/hku-mars/FAST_LIO.git
cd ..
catkin_make
11.2 配置参数
同理:
common:
lid_topic: "/velodyne_points"
imu_topic: "/handsfree/imu"
preprocess:
lidar_type: 2 # 1 for Livox serials LiDAR, 2 for Velodyne LiDAR, 3 for ouster LiDAR,
scan_line: 32
scan_rate: 10 # only need to be set for velodyne, unit: Hz,
timestamp_unit: 2 # the unit of time/t field in the PointCloud2 rostopic: 0-second, 1-milisecond, 2-microsecond, 3-nanosecond.
blind: 2
mapping:
acc_cov: 3.7686306102624571e-02
gyr_cov: 2.3417543020438883e-03
b_acc_cov: 1.1416642385952368e-03
b_gyr_cov: 1.4428407712885209e-05
extrinsic_est_en: false # true: enable the online estimation of IMU-LiDAR extrinsic,
extrinsic_T: [ 0.27255, -0.00053,0.17954]
extrinsic_R: [ 1, 0, 0,
0, 1, 0,
0, 0, 1]
publish:
# 发布路径
path_en: true
pcd_save:
# 如无必要不用保存点云地图,太大了
pcd_save_en: false
<rosparam command="load" file="$(find fast_lio)/config/velodyne_M2DGR.yaml" />
11.3 运行
source devel/setup.bash
roslaunch fast_lio mapping_velodyne_M2DGR.launch
# 在bag所在文件夹下打开终端,开始播放数据集:
rosbag play street_02.bag
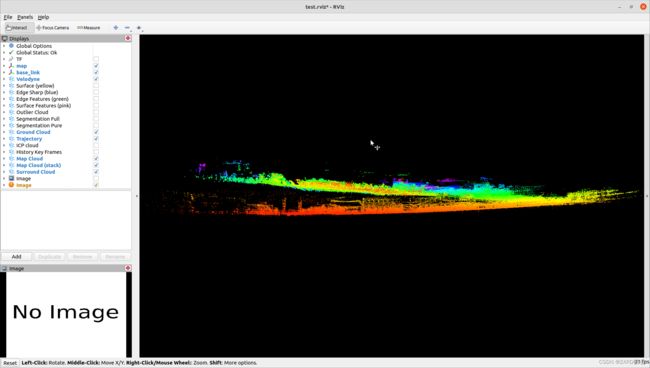
看起来还行

十二、FAST-LIVO
12.1 安装
(1)已安装:
- Ubuntu 16.04~20.04. ROS Installation.
- PCL>=1.6, Follow PCL Installation.
- Eigen>=3.3.4, Follow Eigen Installation.
- OpenCV>=3.2, Follow Opencv Installation.
- Livox-sdk
- Livox_ros_driver
(2)安装非模板类的Sophus:
git clone https://github.com/strasdat/Sophus.git
cd Sophus
# 版本回溯
git checkout a621ff
mkdir build && cd build
cmake ..
make
在make之前,先修改这个版本Sophus的bug的,打开Sophus/sophus/so2.cpp文件,将代码修改如下
// unit_complex_.real() = 1.;
// unit_complex_.imag() = 0.;
unit_complex_.real(1.);
unit_complex_.imag(0.);
make
# 如果已经安装过模板类的不用担心,安装时互不影响,*.h和*.hpp可以共存于一个文件夹
sudo make install
(3)安装Vikit
cd ~/catkin_ws/src
git clone https://github.com/uzh-rpg/rpg_vikit.git
(4)安装FAST-LIVO
cd ~/catkin_ws/src
git clone https://github.com/hku-mars/FAST-LIVO
cd ..
catkin_make
如果报OpenCV的错,将CMakeLists.txt中的
FIND_PACKAGE(OpenCV REQUIRED)
# 改为
FIND_PACKAGE(OpenCV 4 REQUIRED)
将报错的参数替换
// CV_RANSAC
cv::RANSAC
// CV_INTER_LINEAR //双线性插值
cv::INTER_LINEAR
// CV_WINDOW_AUTOSIZE
cv::WINDOW_AUTOSIZE
如果出现大量的类似错误:/usr/bin/ld: /home/zard/catkin_ws_LiDAR/devel/lib/libvikit_common.so: undefined reference to Sophus::SE3::operator*(Eigen::Matrix,执行FIND_PACKAGE(sophus REQUIRED)时,libSophus.so 应该被链接到 Sophus_LIBRARIES, 但cmake却没链接上(原因未知),因此出现这个错误。显式将Sophus_LIBRARIES 链接到libSophus.so:
FIND_PACKAGE(Sophus REQUIRED)
set(Sophus_LIBRARIES libSophus.so)
12.2 运行
写到这里发现由于FAST-LIVO需要严格的时间同步,M2DGR数据不太行,但是写了就不删了,这里运行示例数据:
roslaunch fast_livo mapping_avia.launch
rosbag play hk1.bag
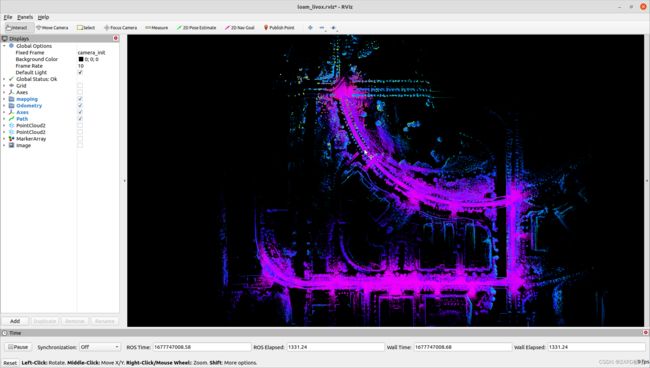
图建的十分漂亮,也很稳
12.3 R3LIVE
这里我补充一下类似的,R3LIVE的编译运行,已安装Livox-sdk、Livox_ros_driver
(1)CGAL
sudo apt-get install libcgal-dev
(2)编译
cd ~/catkin_ws/src
git clone https://github.com/hku-mars/r3live.git
catkin_make
source ~/catkin_ws/devel/setup.bash
(3)运行
roslaunch r3live r3live_bag.launch
rosbag play YOUR.bag
十三、Faster-LIO
Faster_LIO是高博在FAST_LIO上改进的开源SLAM,使得SLAM的效率更高。
13.1 Faster-LIO的安装
Faster-LIO的编译十分简单,高博已经在20.04测试过了,首先安装依赖项:
- ROS (melodic or noetic),安装方法参考我之前的博客
- glog:
sudo apt-get install libgoogle-glog-dev - eigen:
sudo apt-get install libeigen3-dev - pcl:
sudo apt-get install libpcl-dev - yaml-cpp:
sudo apt-get install libyaml-cpp-dev
之后可以编译:
# 注意不要和Livox_ros_driver在同一个工作空间中,否则Livox_ros_driver节点名称冲突
mkdir catkin_ws/src -p
cd catkin_ws
catkin_make
13.2 配置参数
添加配置文件以及launch文件,主要修改以下内容
common:
dataset: "M2DGR"
lid_topic: "velodyne_points"
imu_topic: "handsfree/imu"
time_sync_en: false # ONLY turn on when external time synchronization is really not possible
preprocess:
lidar_type: 2 # 1 for Livox serials LiDAR, 2 for Velodyne LiDAR, 3 for ouster LiDAR,
scan_line: 32
blind: 4
time_scale: 1e3 # 兼容不同数据集的时间单位
mapping:
acc_cov: 3.7686306102624571e-02
gyr_cov: 2.3417543020438883e-03
b_acc_cov: 1.1416642385952368e-03
b_gyr_cov: 1.4428407712885209e-05
fov_degree: 180
det_range: 100.0
extrinsic_est_en: true # true: enable the online estimation of IMU-LiDAR extrinsic
extrinsic_T: [ 0.27255, -0.00053,0.17954]
extrinsic_R: [ 1, 0, 0,
0, 1, 0,
0, 0, 1]
<rosparam command="load" file="$(find faster_lio)/config/velodyne_M2DGR.yaml" />
13.3 运行
source devel/setup.bash
roslaunch faster_lio mapping_velodyne_M2DGR.launch
# 在bag所在文件夹下打开终端,开始播放数据集:
rosbag play street_02.bag
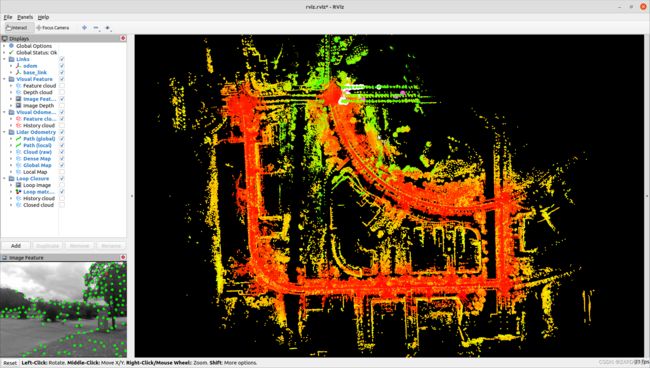
Faster-Lio效果在视觉上看着出奇的好,建的图细节上很漂亮。具体精度要看后面比较,不过运行效率亲测确实比FAST-LIO高很多


十四、hdl_graph_slam
hdl-graph-slam不仅融合了imu、gps、平面、激光等多种输入,同时也带闭环检测等后端处理,即完整的一个slam架构。
14.1 安装
首先我们安装了ROS,然后
sudo apt-get install ros-noetic-geodesy ros-noetic-pcl-ros ros-noetic-nmea-msgs ros-noetic-libg2o
cd catkin_ws/src
git clone https://github.com/koide3/ndt_omp.git
git clone https://github.com/SMRT-AIST/fast_gicp.git --recursive
git clone https://github.com/koide3/hdl_graph_slam
cd .. && catkin_make -DCMAKE_BUILD_TYPE=Release
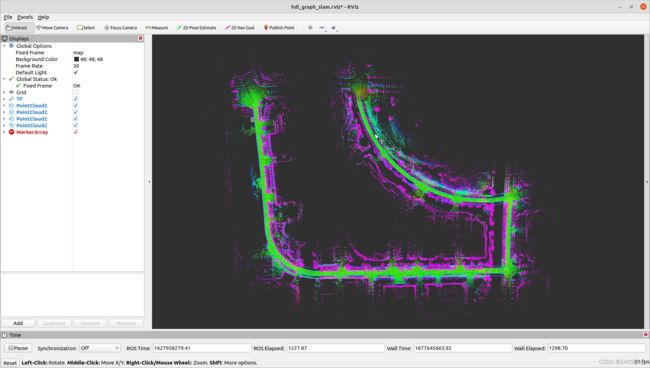
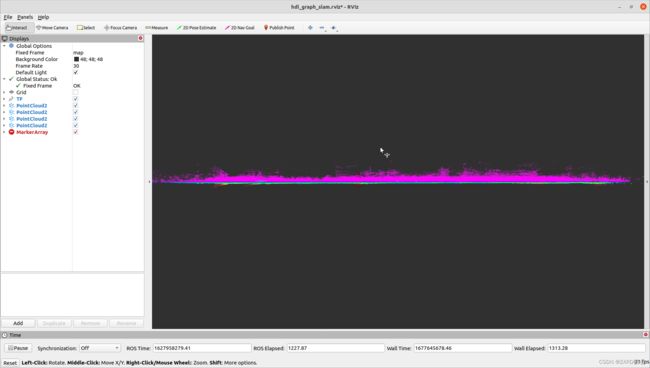
14.2 纯激光
打开四个终端,分别
# 启动master节点
roscore
# 设置use_sim_time参数并运行
rosparam set use_sim_time true
roslaunch hdl_graph_slam hdl_graph_slam_400.launch
# 启动rviz可视化
roscd hdl_graph_slam/rviz
rviz -d hdl_graph_slam.rviz
# 在bag所在文件夹下打开终端,开始播放数据集:
rosbag play street_02.bag --clock
十五、定位结果质量评估与比较
至于轨迹的保存,我都是在建图模块添加保存TUM格式位姿的代码,这里就不详细写了
首先求得每个轨迹的绝对误差(A-LOAM为例,street_02.txt为轨迹真值,A-LOAM为A-LOAM轨迹输出结果):
evo_ape tum street_02.txt A-LOAM -va -s --plot --plot_mode=xy --save_results A-LOAM.zip


同样的方法求得其他轨迹的绝对轨迹误差结果,放在同一个文件夹下,比较:
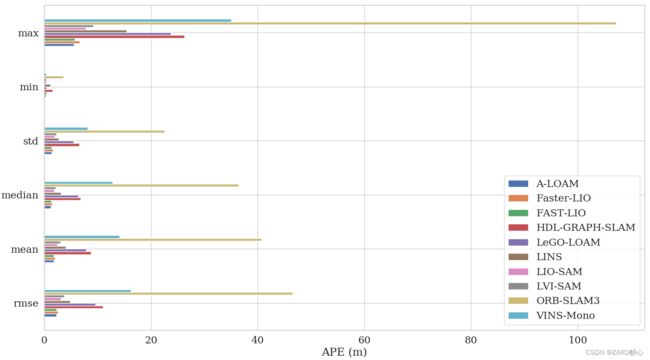
可以看到ORB-SLAM3的误差太大了,我们去掉它比较其他的

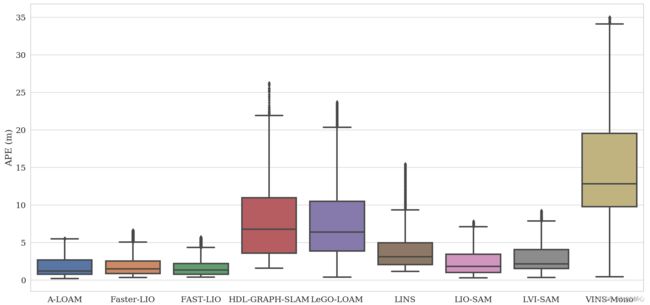
对于此数据,视觉效果不太好,猜测可能是图像时间戳跳变严重并且频率较低。而其他传感器的数据在各个算法的效果也都平平,把各个算法都拉到同一个水平线上,大多数多源融合算法甚至不如纯激光的A-LOAM,哈哈哈哈哈哈哈