stm32 产生精准脉冲数PWM
stm32 产生精准脉冲数PWM
PWM输出TIM高级定时器、通用定时器自带PWM输出功能,难点在于指定脉冲的个数。
方法1:
产生一个周期的PWM触发一次中断,中断计数实现指定个数PWM,则N个PWM波形,触发N次中断。次类方法看起来看不错,实际应用的时候,当PWM的频率高的时候,程序就会频繁进入中断,导致整个程序的实时性变差。低频的时候可以用,一般频率不超过1KHz,1mS中断一次。
方法2:定时器中断法
输出PWM的同时,采用高级定时器的重复次数计数器,将脉冲数放在计数器里面,到达个数的时候溢出中断。


小结:
这个方法比较简单,注意计数器是8位,所以只能计数256个脉冲,需要增加个数的,可以在256个溢出中断里面计算,每次进入中断就减去256,再重新给重复计数器剩下的数值,每次最多给256,最后实现超过n个256脉冲+小于m个脉冲的组合。
公示: 目标脉冲y=n*256+m;
n=y/256
m=y%256
这个方法不错,但是只有高级定时器才有重复计数器。
还可以开启另外一个定时器
比如:
- 定时器1输出PWM。周期是1ms,占空比可以自己设定。
- 定时器2用来定时,想要输出100个脉冲,定时器2就定时100*1ms=100ms。
- 同时启动定时器1、2。定时时间到在TIM2中断中关闭PWM输出。
小结:设定好,两个定时器的周期数,相同的最好计算,由于计数器是16位的,所以最大计算范围是65536。
方法3
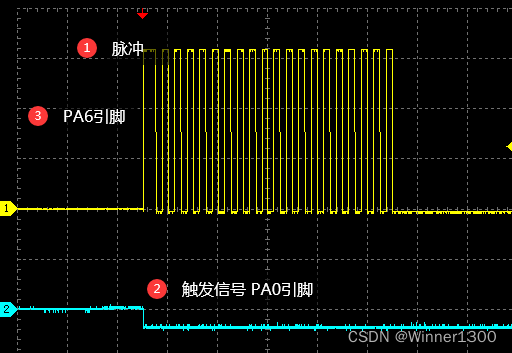
采用两个定时器,从模式定时器产生PWM,主模式定时器控制PWM的产生时间。
如下图:从定时器TIM3,ITR1(TS=001)主定时器则为TIM2。


设置主定时器为单脉冲模式



TIM_SelectOutputTrigger(TIM2,TIM_TRGOSource_OC1Ref); //OC1REF signal is used as the trigger output (TRGO).单一模式不需要设置
输出引脚


void TIM_Init(void)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStruct;
TIM_OCInitTypeDef TIM_OCInitStruct;
GPIO_InitTypeDef GPIO_InitStruct;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA|RCC_APB2Periph_GPIOC, ENABLE);//使能PC,PA端口时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2|RCC_APB1Periph_TIM3,ENABLE); //使能定时器23的时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE); //使能复用IO时钟
//GPIO_PinRemapConfig(GPIO_FullRemap_TIM3, ENABLE);
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_0;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_InitStruct);
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_6;
GPIO_Init(GPIOA,&GPIO_InitStruct);
//TIM2工作在单脉冲下
TIM_TimeBaseInitStruct.TIM_CounterMode = TIM_CounterMode_Up;//向上计数模式
TIM_TimeBaseInitStruct.TIM_Prescaler = 7199; //预分频值,每100us计数一次
TIM_TimeBaseInitStruct.TIM_Period = 99; //重装值,决定单脉冲周期
TIM_TimeBaseInit(TIM2,&TIM_TimeBaseInitStruct);
TIM_SelectOnePulseMode(TIM2,TIM_OPMode_Single); //设置TIM2在单脉冲模式,且是单一的脉冲,在下一个更新事件停止
TIM_SelectOutputTrigger(TIM2,TIM_TRGOSource_OC1Ref); //OC1REF signal is used as the trigger output (TRGO).单一模式不需要设置
TIM_OC1PreloadConfig(TIM2,TIM_OCPreload_Enable); //使能定时器2的通道1预装载寄存器
TIM_OCInitStruct.TIM_OCMode = TIM_OCMode_PWM2; //在向上计数时,一旦TIMx_CNT>TIMx_CCR1时通道1为有效电平
//TIM_OCInitStruct.TIM_OutputState = TIM_OutputState_Enable; //OC1输出使能
TIM_OCInitStruct.TIM_OCPolarity = TIM_OCPolarity_High;//TIM_OCPolarity_High; //有效电平为高TIM_OCPolarity_Low
//没什么用
TIM_OCInitStruct.TIM_Pulse = 20; //比较捕获1的预装载值,决定单脉冲占空比,这个20就是低电平延续的来源
TIM_OC1Init(TIM2,&TIM_OCInitStruct);
TIM_Cmd(TIM2,DISABLE); //Disable the TIM Counter
TIM_TimeBaseInitStruct.TIM_CounterMode = TIM_CounterMode_Up;//向上计数模式
TIM_TimeBaseInitStruct.TIM_Prescaler = 719; //预分频值,10us计数一次
TIM_TimeBaseInitStruct.TIM_Period = 29; //重装值,决定PWM周期
TIM_TimeBaseInit(TIM3,&TIM_TimeBaseInitStruct);
TIM_SelectSlaveMode(TIM3, TIM_SlaveMode_Gated);//TIM3为门控模式
TIM_SelectMasterSlaveMode(TIM3,TIM_MasterSlaveMode_Enable);//使能TIM3的主从模式
TIM_SelectInputTrigger(TIM3,TIM_TS_ITR1);//内部触发,TIM_TS_ITR1对应TIM2
TIM_OC1PreloadConfig(TIM3,TIM_OCPreload_Enable);//使能定时器3的通道1预装载寄存器
TIM_OCInitStruct.TIM_OCMode = TIM_OCMode_PWM2;//在向上计数时,一旦TIMx_CNT>TIMx_CCR1时通道1为有效电平
TIM_OCInitStruct.TIM_OutputState = TIM_OutputState_Enable;//OC1输出使能
TIM_OCInitStruct.TIM_OCPolarity = TIM_OCPolarity_High;//有效电平为高
TIM_OCInitStruct.TIM_Pulse = 15;//比较捕获1的预装载值,占空比为50%
TIM_OC1Init(TIM3,&TIM_OCInitStruct);
TIM_Cmd(TIM3,ENABLE);//使能TIM3
}
/*********************************************************
名称:Pulse_Control(u16 cycle, u16 pulse_num)
说明:生成指定个数脉冲,每个脉冲周期为cycle微秒,脉冲个数生成的个数
和单脉冲高电平时间有关系,脉冲个数就由高电平时间来确定
参数cycle:为TIM3一个脉冲周期,单位(us)
参数pulse_num:为脉冲个数,决定步进电机步数
**65516=65536 -20**
要求:cycle * pulse_num < 6551600 us
返回值:无
*********************************************************/
void Pulse_Control(u16 cycle, u16 pulse_num)
{
u16 arr3 = 0;
u32 time = 0;
if(pulse_num)
{
time = cycle * pulse_num / 100;//预分频为720,100us计数一次
arr3 = cycle / 10; //预分频为72,10us计数一次
TIM_SetAutoreload(TIM2, time+19);//低电平周期加高电平周期
TIM_SetAutoreload(TIM3, arr3 - 1);
TIM_SetCompare1(TIM3,arr3 / 2); //设置PWM占空比为50%
TIM_Cmd(TIM2,ENABLE);//使能TIM2
}
}
单脉冲主从模式
``
单次测量
循环发送
```c
int main()
{
TIM_Init();
delay_init();
while(1)
{
Pulse_Control(500,20); //500us,10个脉冲
delay_ms(1);
}
}
** 周期15.057ms ,占空比参数20**

** 周期15.057ms ,占空比参数20**

#include "stm32f10x.h"
#include "delay.h"
#include "timer.h"
int main()
{
TIM_Init();
delay_init();
while(1)
{
Pulse_Control(500,20); //500us,10个脉冲
delay_ms(1);
}
}

连续输出波形的探讨
去掉主函数的延时函数,加多脉冲的输出
一开始以为会在没执行完脉冲的输出个数后会覆盖输出,导致输出混乱,实际测量才发现并没有
int main()
{
TIM_Init();
delay_init();
while(1)
{
Pulse_Control(500,500); //500us,10个脉冲
//delay_ms(1);
}
}

意味着如何执行输出指令,它都等待下一个质量执行完才重新输出,出现这样的情况原因如下:

硬件仿真
确实没有使能该位

寄存器详情

** 溢出中断才会更新ARR值**