linux spi字符类驱动注册流程spi_register_driver和简单实例
一、用spi_register_driver函数注册spi驱动。spi的驱动在\kernel\drivers\spi\spi.c
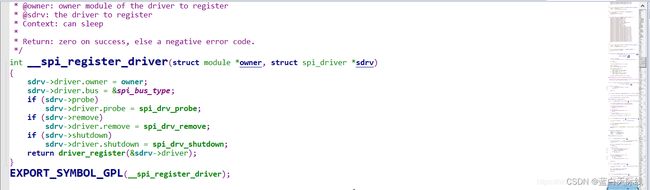
二、这里初始化driver结构的总线类型,然后是调用driver_register注册一个driver,到这里可以回到总线驱动模型的知识,driver_register是所有总线注册一个driver进总线中的统一接口,在学习总线模型的时候知道,在调用driver_register注册一个driver会去遍历总线下的device,并调用总线提供的总线提供的match函数进行匹配,对应的spi总线,它的match函数为:

三、spi_match_device会进行三项比较,任意一项匹配成功则返回1,匹配成功后调用driver的probe函数,就是__spi_register_driver里面的spi_drv_probe函数。

四、spi_drv_probe函数里面会调用spi_driver里面的probe函数。
五,dts里面添加下面的内容就可以完成spi驱动注册了。
/* Firefly SPI demo */
&spi1 {
spi_demo: spi-demo@00{
status = "disabled";
compatible = "firefly,rk3399-spi";
reg = <0x00>;
spi-max-frequency = <48000000>;
/* rk3399 driver support SPI_CPOL | SPI_CPHA | SPI_CS_HIGH */
//spi-cpha; /* SPI mode: CPHA=1 */
//spi-cpol; /* SPI mode: CPOL=1 */
//spi-cs-high;
};
};
status:如果要启用 SPI,则设为 okay,如不启用,设为 disable。
spi-demo@00:由于本例子使用 CS0,故此处设为 00,如果使用 CS1,则设为 01。
compatible:这里的属性必须与驱动中的结构体:of_device_id 中的成员 compatible 保持一致。
reg:此处与 spi-demo@00 保持一致,本例设为:0x00。
spi-max-frequency:此处设置 spi 使用的最高频率。Firefly-RK3399 最高支持 48000000。
spi-cpha,spi-cpol:SPI 的工作模式在此设置,本例所用的模块 SPI 工作模式为 SPI_MODE_0 或者 SPI_MODE_3,这里我们选用 SPI_MODE_0,如果使用 SPI_MODE_3,spi_demo 中打开 spi-cpha 和 spi-cpol 即可。
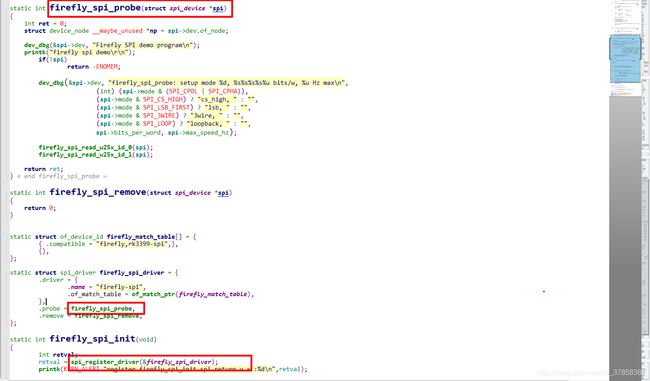
六、spi设备简单示例,读写W25Q128FV。
1、读写 SPI 数据
firefly_spi_probe 中使用了两种接口操作读取 W25Q128FV 的 ID:
firefly_spi_read_w25x_id_0 接口直接使用了 spi_transfer 和 spi_message 来传送数据。
firefly_spi_read_w25x_id_1 接口则使用 SPI 接口 spi_write_then_read 来读写数据。
2、驱动代码
/*
* Driver for pwm demo on Firefly board.
*
* Copyright (C) 2016, Zhongshan T-chip Intelligent Technology Co.,ltd.
* Copyright 2006 Sam Chan
*
* This program is free software; you can redistribute it and/or modify
* it under the terms of the GNU General Public License version 2 as
* published by the Free Software Foundation.
*/
#define DEBUG
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#define FIREFLY_SPI_READ_ID_CMD 0x9F
#define FIREFLY_SPI_PRINT_ID(rbuf) \
do { \
if (status == 0) \
dev_dbg(&spi->dev, "%s: ID = %02x %02x %02x %02x %02x\n", __FUNCTION__, \
rbuf[0], rbuf[1], rbuf[2], rbuf[3], rbuf[4]); \
else \
dev_err(&spi->dev, "%s: read ID error\n", __FUNCTION__); \
}while(0)
static int firefly_spi_read_w25x_id_0(struct spi_device *spi)
{
int status;
char tbuf[]={FIREFLY_SPI_READ_ID_CMD};
char rbuf[5];
struct spi_transfer t = {
.tx_buf = tbuf,
.len = sizeof(tbuf),
};
struct spi_transfer r = {
.rx_buf = rbuf,
.len = sizeof(rbuf),
};
struct spi_message m;
spi_message_init(&m);
spi_message_add_tail(&t, &m);
spi_message_add_tail(&r, &m);
status = spi_sync(spi, &m);
printk("%s ID = %02x %02x %02x %02x %02x\n", __FUNCTION__, rbuf[0], rbuf[1], rbuf[2], rbuf[3], rbuf[4]);
return status;
}
static int firefly_spi_read_w25x_id_1(struct spi_device *spi)
{
int status;
char tbuf[] = {FIREFLY_SPI_READ_ID_CMD};
char rbuf[5];
status = spi_write_then_read(spi, tbuf, sizeof(tbuf), rbuf, sizeof(rbuf));
printk("%s ID = %02x %02x %02x %02x %02x\n", __FUNCTION__, rbuf[0], rbuf[1], rbuf[2], rbuf[3], rbuf[4]);
return status;
}
static int firefly_spi_probe(struct spi_device *spi)
{
int ret = 0;
struct device_node __maybe_unused *np = spi->dev.of_node;
dev_dbg(&spi->dev, "Firefly SPI demo program\n");
printk("firefly spi demo\r\n");
if(!spi)
return -ENOMEM;
dev_dbg(&spi->dev, "firefly_spi_probe: setup mode %d, %s%s%s%s%u bits/w, %u Hz max\n",
(int) (spi->mode & (SPI_CPOL | SPI_CPHA)),
(spi->mode & SPI_CS_HIGH) ? "cs_high, " : "",
(spi->mode & SPI_LSB_FIRST) ? "lsb, " : "",
(spi->mode & SPI_3WIRE) ? "3wire, " : "",
(spi->mode & SPI_LOOP) ? "loopback, " : "",
spi->bits_per_word, spi->max_speed_hz);
firefly_spi_read_w25x_id_0(spi);
firefly_spi_read_w25x_id_1(spi);
return ret;
}
static int firefly_spi_remove(struct spi_device *spi)
{
return 0;
}
static struct of_device_id firefly_match_table[] = {
{ .compatible = "firefly,rk3399-spi",},
{},
};
static struct spi_driver firefly_spi_driver = {
.driver = {
.name = "firefly-spi",
.of_match_table = of_match_ptr(firefly_match_table),
},
.probe = firefly_spi_probe,
.remove = firefly_spi_remove,
};
static int firefly_spi_init(void)
{
int retval;
retval = spi_register_driver(&firefly_spi_driver);
printk(KERN_ALERT "register firefly_spi_init spi return v = :%d\n",retval);
return retval;
}
module_init(firefly_spi_init);
static void firefly_spi_exit(void)
{
spi_unregister_driver(&firefly_spi_driver);
}
module_exit(firefly_spi_exit);
MODULE_AUTHOR("zhansb ");
MODULE_DESCRIPTION("Firefly SPI demo driver");
MODULE_ALIAS("platform:firefly-spi");
MODULE_LICENSE("GPL"); 七、Linux 提供了一个功能有限的 SPI 用户接口,如果不需要用到 IRQ 或者其他内核驱动接口,可以考虑使用接口 spidev 编写用户层程序控制 SPI 设备。代码在kernel\drivers\spi\spidev.c。
/*
* Simple synchronous userspace interface to SPI devices
*
* Copyright (C) 2006 SWAPP
* Andrea Paterniani
* Copyright (C) 2007 David Brownell (simplification, cleanup)
*
* This program is free software; you can redistribute it and/or modify
* it under the terms of the GNU General Public License as published by
* the Free Software Foundation; either version 2 of the License, or
* (at your option) any later version.
*
* This program is distributed in the hope that it will be useful,
* but WITHOUT ANY WARRANTY; without even the implied warranty of
* MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
* GNU General Public License for more details.
*/
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
/*
* This supports access to SPI devices using normal userspace I/O calls.
* Note that while traditional UNIX/POSIX I/O semantics are half duplex,
* and often mask message boundaries, full SPI support requires full duplex
* transfers. There are several kinds of internal message boundaries to
* handle chipselect management and other protocol options.
*
* SPI has a character major number assigned. We allocate minor numbers
* dynamically using a bitmask. You must use hotplug tools, such as udev
* (or mdev with busybox) to create and destroy the /dev/spidevB.C device
* nodes, since there is no fixed association of minor numbers with any
* particular SPI bus or device.
*/
#define SPIDEV_MAJOR 153 /* assigned */
#define N_SPI_MINORS 32 /* ... up to 256 */
static DECLARE_BITMAP(minors, N_SPI_MINORS);
/* Bit masks for spi_device.mode management. Note that incorrect
* settings for some settings can cause *lots* of trouble for other
* devices on a shared bus:
*
* - CS_HIGH ... this device will be active when it shouldn't be
* - 3WIRE ... when active, it won't behave as it should
* - NO_CS ... there will be no explicit message boundaries; this
* is completely incompatible with the shared bus model
* - READY ... transfers may proceed when they shouldn't.
*
* REVISIT should changing those flags be privileged?
*/
#define SPI_MODE_MASK (SPI_CPHA | SPI_CPOL | SPI_CS_HIGH \
| SPI_LSB_FIRST | SPI_3WIRE | SPI_LOOP \
| SPI_NO_CS | SPI_READY | SPI_TX_DUAL \
| SPI_TX_QUAD | SPI_RX_DUAL | SPI_RX_QUAD)
struct spidev_data {
dev_t devt;
spinlock_t spi_lock;
struct spi_device *spi;
struct list_head device_entry;
/* TX/RX buffers are NULL unless this device is open (users > 0) */
struct mutex buf_lock;
unsigned users;
u8 *tx_buffer;
u8 *rx_buffer;
u32 speed_hz;
};
static LIST_HEAD(device_list);
static DEFINE_MUTEX(device_list_lock);
static unsigned bufsiz = 4096;
module_param(bufsiz, uint, S_IRUGO);
MODULE_PARM_DESC(bufsiz, "data bytes in biggest supported SPI message");
/*-------------------------------------------------------------------------*/
static ssize_t
spidev_sync(struct spidev_data *spidev, struct spi_message *message)
{
DECLARE_COMPLETION_ONSTACK(done);
int status;
struct spi_device *spi;
spin_lock_irq(&spidev->spi_lock);
spi = spidev->spi;
spin_unlock_irq(&spidev->spi_lock);
if (spi == NULL)
status = -ESHUTDOWN;
else
status = spi_sync(spi, message);
if (status == 0)
status = message->actual_length;
return status;
}
static inline ssize_t
spidev_sync_write(struct spidev_data *spidev, size_t len)
{
struct spi_transfer t = {
.tx_buf = spidev->tx_buffer,
.len = len,
.speed_hz = spidev->speed_hz,
};
struct spi_message m;
spi_message_init(&m);
spi_message_add_tail(&t, &m);
return spidev_sync(spidev, &m);
}
static inline ssize_t
spidev_sync_read(struct spidev_data *spidev, size_t len)
{
struct spi_transfer t = {
.rx_buf = spidev->rx_buffer,
.len = len,
.speed_hz = spidev->speed_hz,
};
struct spi_message m;
spi_message_init(&m);
spi_message_add_tail(&t, &m);
return spidev_sync(spidev, &m);
}
/*-------------------------------------------------------------------------*/
/* Read-only message with current device setup */
static ssize_t
spidev_read(struct file *filp, char __user *buf, size_t count, loff_t *f_pos)
{
struct spidev_data *spidev;
ssize_t status = 0;
/* chipselect only toggles at start or end of operation */
if (count > bufsiz)
return -EMSGSIZE;
spidev = filp->private_data;
mutex_lock(&spidev->buf_lock);
status = spidev_sync_read(spidev, count);
if (status > 0) {
unsigned long missing;
missing = copy_to_user(buf, spidev->rx_buffer, status);
if (missing == status)
status = -EFAULT;
else
status = status - missing;
}
mutex_unlock(&spidev->buf_lock);
return status;
}
/* Write-only message with current device setup */
static ssize_t
spidev_write(struct file *filp, const char __user *buf,
size_t count, loff_t *f_pos)
{
struct spidev_data *spidev;
ssize_t status = 0;
unsigned long missing;
/* chipselect only toggles at start or end of operation */
if (count > bufsiz)
return -EMSGSIZE;
spidev = filp->private_data;
mutex_lock(&spidev->buf_lock);
missing = copy_from_user(spidev->tx_buffer, buf, count);
if (missing == 0)
status = spidev_sync_write(spidev, count);
else
status = -EFAULT;
mutex_unlock(&spidev->buf_lock);
return status;
}
static int spidev_message(struct spidev_data *spidev,
struct spi_ioc_transfer *u_xfers, unsigned n_xfers)
{
struct spi_message msg;
struct spi_transfer *k_xfers;
struct spi_transfer *k_tmp;
struct spi_ioc_transfer *u_tmp;
unsigned n, total, tx_total, rx_total;
u8 *tx_buf, *rx_buf;
int status = -EFAULT;
spi_message_init(&msg);
k_xfers = kcalloc(n_xfers, sizeof(*k_tmp), GFP_KERNEL);
if (k_xfers == NULL)
return -ENOMEM;
/* Construct spi_message, copying any tx data to bounce buffer.
* We walk the array of user-provided transfers, using each one
* to initialize a kernel version of the same transfer.
*/
tx_buf = spidev->tx_buffer;
rx_buf = spidev->rx_buffer;
total = 0;
tx_total = 0;
rx_total = 0;
for (n = n_xfers, k_tmp = k_xfers, u_tmp = u_xfers;
n;
n--, k_tmp++, u_tmp++) {
k_tmp->len = u_tmp->len;
total += k_tmp->len;
/* Since the function returns the total length of transfers
* on success, restrict the total to positive int values to
* avoid the return value looking like an error. Also check
* each transfer length to avoid arithmetic overflow.
*/
if (total > INT_MAX || k_tmp->len > INT_MAX) {
status = -EMSGSIZE;
goto done;
}
if (u_tmp->rx_buf) {
/* this transfer needs space in RX bounce buffer */
rx_total += k_tmp->len;
if (rx_total > bufsiz) {
status = -EMSGSIZE;
goto done;
}
k_tmp->rx_buf = rx_buf;
if (!access_ok(VERIFY_WRITE, (u8 __user *)
(uintptr_t) u_tmp->rx_buf,
u_tmp->len))
goto done;
rx_buf += k_tmp->len;
}
if (u_tmp->tx_buf) {
/* this transfer needs space in TX bounce buffer */
tx_total += k_tmp->len;
if (tx_total > bufsiz) {
status = -EMSGSIZE;
goto done;
}
k_tmp->tx_buf = tx_buf;
if (copy_from_user(tx_buf, (const u8 __user *)
(uintptr_t) u_tmp->tx_buf,
u_tmp->len))
goto done;
tx_buf += k_tmp->len;
}
k_tmp->cs_change = !!u_tmp->cs_change;
k_tmp->tx_nbits = u_tmp->tx_nbits;
k_tmp->rx_nbits = u_tmp->rx_nbits;
k_tmp->bits_per_word = u_tmp->bits_per_word;
k_tmp->delay_usecs = u_tmp->delay_usecs;
k_tmp->speed_hz = u_tmp->speed_hz;
if (!k_tmp->speed_hz)
k_tmp->speed_hz = spidev->speed_hz;
#ifdef VERBOSE
dev_dbg(&spidev->spi->dev,
" xfer len %zd %s%s%s%dbits %u usec %uHz\n",
u_tmp->len,
u_tmp->rx_buf ? "rx " : "",
u_tmp->tx_buf ? "tx " : "",
u_tmp->cs_change ? "cs " : "",
u_tmp->bits_per_word ? : spidev->spi->bits_per_word,
u_tmp->delay_usecs,
u_tmp->speed_hz ? : spidev->spi->max_speed_hz);
#endif
spi_message_add_tail(k_tmp, &msg);
}
status = spidev_sync(spidev, &msg);
if (status < 0)
goto done;
/* copy any rx data out of bounce buffer */
rx_buf = spidev->rx_buffer;
for (n = n_xfers, u_tmp = u_xfers; n; n--, u_tmp++) {
if (u_tmp->rx_buf) {
if (__copy_to_user((u8 __user *)
(uintptr_t) u_tmp->rx_buf, rx_buf,
u_tmp->len)) {
status = -EFAULT;
goto done;
}
rx_buf += u_tmp->len;
}
}
status = total;
done:
kfree(k_xfers);
return status;
}
static struct spi_ioc_transfer *
spidev_get_ioc_message(unsigned int cmd, struct spi_ioc_transfer __user *u_ioc,
unsigned *n_ioc)
{
struct spi_ioc_transfer *ioc;
u32 tmp;
/* Check type, command number and direction */
if (_IOC_TYPE(cmd) != SPI_IOC_MAGIC
|| _IOC_NR(cmd) != _IOC_NR(SPI_IOC_MESSAGE(0))
|| _IOC_DIR(cmd) != _IOC_WRITE)
return ERR_PTR(-ENOTTY);
tmp = _IOC_SIZE(cmd);
if ((tmp % sizeof(struct spi_ioc_transfer)) != 0)
return ERR_PTR(-EINVAL);
*n_ioc = tmp / sizeof(struct spi_ioc_transfer);
if (*n_ioc == 0)
return NULL;
/* copy into scratch area */
ioc = kmalloc(tmp, GFP_KERNEL);
if (!ioc)
return ERR_PTR(-ENOMEM);
if (__copy_from_user(ioc, u_ioc, tmp)) {
kfree(ioc);
return ERR_PTR(-EFAULT);
}
return ioc;
}
static long
spidev_ioctl(struct file *filp, unsigned int cmd, unsigned long arg)
{
int err = 0;
int retval = 0;
struct spidev_data *spidev;
struct spi_device *spi;
u32 tmp;
unsigned n_ioc;
struct spi_ioc_transfer *ioc;
/* Check type and command number */
if (_IOC_TYPE(cmd) != SPI_IOC_MAGIC)
return -ENOTTY;
/* Check access direction once here; don't repeat below.
* IOC_DIR is from the user perspective, while access_ok is
* from the kernel perspective; so they look reversed.
*/
if (_IOC_DIR(cmd) & _IOC_READ)
err = !access_ok(VERIFY_WRITE,
(void __user *)arg, _IOC_SIZE(cmd));
if (err == 0 && _IOC_DIR(cmd) & _IOC_WRITE)
err = !access_ok(VERIFY_READ,
(void __user *)arg, _IOC_SIZE(cmd));
if (err)
return -EFAULT;
/* guard against device removal before, or while,
* we issue this ioctl.
*/
spidev = filp->private_data;
spin_lock_irq(&spidev->spi_lock);
spi = spi_dev_get(spidev->spi);
spin_unlock_irq(&spidev->spi_lock);
if (spi == NULL)
return -ESHUTDOWN;
/* use the buffer lock here for triple duty:
* - prevent I/O (from us) so calling spi_setup() is safe;
* - prevent concurrent SPI_IOC_WR_* from morphing
* data fields while SPI_IOC_RD_* reads them;
* - SPI_IOC_MESSAGE needs the buffer locked "normally".
*/
mutex_lock(&spidev->buf_lock);
switch (cmd) {
/* read requests */
case SPI_IOC_RD_MODE:
retval = __put_user(spi->mode & SPI_MODE_MASK,
(__u8 __user *)arg);
break;
case SPI_IOC_RD_MODE32:
retval = __put_user(spi->mode & SPI_MODE_MASK,
(__u32 __user *)arg);
break;
case SPI_IOC_RD_LSB_FIRST:
retval = __put_user((spi->mode & SPI_LSB_FIRST) ? 1 : 0,
(__u8 __user *)arg);
break;
case SPI_IOC_RD_BITS_PER_WORD:
retval = __put_user(spi->bits_per_word, (__u8 __user *)arg);
break;
case SPI_IOC_RD_MAX_SPEED_HZ:
retval = __put_user(spidev->speed_hz, (__u32 __user *)arg);
break;
/* write requests */
case SPI_IOC_WR_MODE:
case SPI_IOC_WR_MODE32:
if (cmd == SPI_IOC_WR_MODE)
retval = __get_user(tmp, (u8 __user *)arg);
else
retval = __get_user(tmp, (u32 __user *)arg);
if (retval == 0) {
u32 save = spi->mode;
if (tmp & ~SPI_MODE_MASK) {
retval = -EINVAL;
break;
}
tmp |= spi->mode & ~SPI_MODE_MASK;
spi->mode = (u16)tmp;
retval = spi_setup(spi);
if (retval < 0)
spi->mode = save;
else
dev_dbg(&spi->dev, "spi mode %x\n", tmp);
}
break;
case SPI_IOC_WR_LSB_FIRST:
retval = __get_user(tmp, (__u8 __user *)arg);
if (retval == 0) {
u32 save = spi->mode;
if (tmp)
spi->mode |= SPI_LSB_FIRST;
else
spi->mode &= ~SPI_LSB_FIRST;
retval = spi_setup(spi);
if (retval < 0)
spi->mode = save;
else
dev_dbg(&spi->dev, "%csb first\n",
tmp ? 'l' : 'm');
}
break;
case SPI_IOC_WR_BITS_PER_WORD:
retval = __get_user(tmp, (__u8 __user *)arg);
if (retval == 0) {
u8 save = spi->bits_per_word;
spi->bits_per_word = tmp;
retval = spi_setup(spi);
if (retval < 0)
spi->bits_per_word = save;
else
dev_dbg(&spi->dev, "%d bits per word\n", tmp);
}
break;
case SPI_IOC_WR_MAX_SPEED_HZ:
retval = __get_user(tmp, (__u32 __user *)arg);
if (retval == 0) {
u32 save = spi->max_speed_hz;
spi->max_speed_hz = tmp;
retval = spi_setup(spi);
if (retval >= 0)
spidev->speed_hz = tmp;
else
dev_dbg(&spi->dev, "%d Hz (max)\n", tmp);
spi->max_speed_hz = save;
}
break;
default:
/* segmented and/or full-duplex I/O request */
/* Check message and copy into scratch area */
ioc = spidev_get_ioc_message(cmd,
(struct spi_ioc_transfer __user *)arg, &n_ioc);
if (IS_ERR(ioc)) {
retval = PTR_ERR(ioc);
break;
}
if (!ioc)
break; /* n_ioc is also 0 */
/* translate to spi_message, execute */
retval = spidev_message(spidev, ioc, n_ioc);
kfree(ioc);
break;
}
mutex_unlock(&spidev->buf_lock);
spi_dev_put(spi);
return retval;
}
#ifdef CONFIG_COMPAT
static long
spidev_compat_ioc_message(struct file *filp, unsigned int cmd,
unsigned long arg)
{
struct spi_ioc_transfer __user *u_ioc;
int retval = 0;
struct spidev_data *spidev;
struct spi_device *spi;
unsigned n_ioc, n;
struct spi_ioc_transfer *ioc;
u_ioc = (struct spi_ioc_transfer __user *) compat_ptr(arg);
if (!access_ok(VERIFY_READ, u_ioc, _IOC_SIZE(cmd)))
return -EFAULT;
/* guard against device removal before, or while,
* we issue this ioctl.
*/
spidev = filp->private_data;
spin_lock_irq(&spidev->spi_lock);
spi = spi_dev_get(spidev->spi);
spin_unlock_irq(&spidev->spi_lock);
if (spi == NULL)
return -ESHUTDOWN;
/* SPI_IOC_MESSAGE needs the buffer locked "normally" */
mutex_lock(&spidev->buf_lock);
/* Check message and copy into scratch area */
ioc = spidev_get_ioc_message(cmd, u_ioc, &n_ioc);
if (IS_ERR(ioc)) {
retval = PTR_ERR(ioc);
goto done;
}
if (!ioc)
goto done; /* n_ioc is also 0 */
/* Convert buffer pointers */
for (n = 0; n < n_ioc; n++) {
ioc[n].rx_buf = (uintptr_t) compat_ptr(ioc[n].rx_buf);
ioc[n].tx_buf = (uintptr_t) compat_ptr(ioc[n].tx_buf);
}
/* translate to spi_message, execute */
retval = spidev_message(spidev, ioc, n_ioc);
kfree(ioc);
done:
mutex_unlock(&spidev->buf_lock);
spi_dev_put(spi);
return retval;
}
static long
spidev_compat_ioctl(struct file *filp, unsigned int cmd, unsigned long arg)
{
if (_IOC_TYPE(cmd) == SPI_IOC_MAGIC
&& _IOC_NR(cmd) == _IOC_NR(SPI_IOC_MESSAGE(0))
&& _IOC_DIR(cmd) == _IOC_WRITE)
return spidev_compat_ioc_message(filp, cmd, arg);
return spidev_ioctl(filp, cmd, (unsigned long)compat_ptr(arg));
}
#else
#define spidev_compat_ioctl NULL
#endif /* CONFIG_COMPAT */
static int spidev_open(struct inode *inode, struct file *filp)
{
struct spidev_data *spidev;
int status = -ENXIO;
mutex_lock(&device_list_lock);
list_for_each_entry(spidev, &device_list, device_entry) {
if (spidev->devt == inode->i_rdev) {
status = 0;
break;
}
}
if (status) {
pr_debug("spidev: nothing for minor %d\n", iminor(inode));
goto err_find_dev;
}
if (!spidev->tx_buffer) {
spidev->tx_buffer = kmalloc(bufsiz, GFP_KERNEL);
if (!spidev->tx_buffer) {
dev_dbg(&spidev->spi->dev, "open/ENOMEM\n");
status = -ENOMEM;
goto err_find_dev;
}
}
if (!spidev->rx_buffer) {
spidev->rx_buffer = kmalloc(bufsiz, GFP_KERNEL);
if (!spidev->rx_buffer) {
dev_dbg(&spidev->spi->dev, "open/ENOMEM\n");
status = -ENOMEM;
goto err_alloc_rx_buf;
}
}
spidev->users++;
filp->private_data = spidev;
nonseekable_open(inode, filp);
mutex_unlock(&device_list_lock);
return 0;
err_alloc_rx_buf:
kfree(spidev->tx_buffer);
spidev->tx_buffer = NULL;
err_find_dev:
mutex_unlock(&device_list_lock);
return status;
}
static int spidev_release(struct inode *inode, struct file *filp)
{
struct spidev_data *spidev;
mutex_lock(&device_list_lock);
spidev = filp->private_data;
filp->private_data = NULL;
/* last close? */
spidev->users--;
if (!spidev->users) {
int dofree;
kfree(spidev->tx_buffer);
spidev->tx_buffer = NULL;
kfree(spidev->rx_buffer);
spidev->rx_buffer = NULL;
spin_lock_irq(&spidev->spi_lock);
if (spidev->spi)
spidev->speed_hz = spidev->spi->max_speed_hz;
/* ... after we unbound from the underlying device? */
dofree = (spidev->spi == NULL);
spin_unlock_irq(&spidev->spi_lock);
if (dofree)
kfree(spidev);
}
mutex_unlock(&device_list_lock);
return 0;
}
static const struct file_operations spidev_fops = {
.owner = THIS_MODULE,
/* REVISIT switch to aio primitives, so that userspace
* gets more complete API coverage. It'll simplify things
* too, except for the locking.
*/
.write = spidev_write,
.read = spidev_read,
.unlocked_ioctl = spidev_ioctl,
.compat_ioctl = spidev_compat_ioctl,
.open = spidev_open,
.release = spidev_release,
.llseek = no_llseek,
};
/*-------------------------------------------------------------------------*/
/* The main reason to have this class is to make mdev/udev create the
* /dev/spidevB.C character device nodes exposing our userspace API.
* It also simplifies memory management.
*/
static struct class *spidev_class;
#ifdef CONFIG_OF
static const struct of_device_id spidev_dt_ids[] = {
{ .compatible = "rohm,dh2228fv" },
{ .compatible = "lineartechnology,ltc2488" },
{ .compatible = "rockchip,spidev" },
{},
};
MODULE_DEVICE_TABLE(of, spidev_dt_ids);
#endif
/*-------------------------------------------------------------------------*/
static int spidev_probe(struct spi_device *spi)
{
struct spidev_data *spidev;
int status;
unsigned long minor;
/*
* spidev should never be referenced in DT without a specific
* compatible string, it is a Linux implementation thing
* rather than a description of the hardware.
*/
if (spi->dev.of_node && !of_match_device(spidev_dt_ids, &spi->dev)) {
dev_err(&spi->dev, "buggy DT: spidev listed directly in DT\n");
WARN_ON(spi->dev.of_node &&
!of_match_device(spidev_dt_ids, &spi->dev));
}
/* Allocate driver data */
spidev = kzalloc(sizeof(*spidev), GFP_KERNEL);
if (!spidev)
return -ENOMEM;
/* Initialize the driver data */
spidev->spi = spi;
spin_lock_init(&spidev->spi_lock);
mutex_init(&spidev->buf_lock);
INIT_LIST_HEAD(&spidev->device_entry);
/* If we can allocate a minor number, hook up this device.
* Reusing minors is fine so long as udev or mdev is working.
*/
mutex_lock(&device_list_lock);
minor = find_first_zero_bit(minors, N_SPI_MINORS);
if (minor < N_SPI_MINORS) {
struct device *dev;
spidev->devt = MKDEV(SPIDEV_MAJOR, minor);
dev = device_create(spidev_class, &spi->dev, spidev->devt,
spidev, "spidev%d.%d",
spi->master->bus_num, spi->chip_select);
status = PTR_ERR_OR_ZERO(dev);
} else {
dev_dbg(&spi->dev, "no minor number available!\n");
status = -ENODEV;
}
if (status == 0) {
set_bit(minor, minors);
list_add(&spidev->device_entry, &device_list);
}
mutex_unlock(&device_list_lock);
spidev->speed_hz = spi->max_speed_hz;
if (status == 0)
spi_set_drvdata(spi, spidev);
else
kfree(spidev);
return status;
}
static int spidev_remove(struct spi_device *spi)
{
struct spidev_data *spidev = spi_get_drvdata(spi);
/* make sure ops on existing fds can abort cleanly */
spin_lock_irq(&spidev->spi_lock);
spidev->spi = NULL;
spin_unlock_irq(&spidev->spi_lock);
/* prevent new opens */
mutex_lock(&device_list_lock);
list_del(&spidev->device_entry);
device_destroy(spidev_class, spidev->devt);
clear_bit(MINOR(spidev->devt), minors);
if (spidev->users == 0)
kfree(spidev);
mutex_unlock(&device_list_lock);
return 0;
}
static struct spi_driver spidev_spi_driver = {
.driver = {
.name = "spidev",
.of_match_table = of_match_ptr(spidev_dt_ids),
},
.probe = spidev_probe,
.remove = spidev_remove,
/* NOTE: suspend/resume methods are not necessary here.
* We don't do anything except pass the requests to/from
* the underlying controller. The refrigerator handles
* most issues; the controller driver handles the rest.
*/
};
/*-------------------------------------------------------------------------*/
static int __init spidev_init(void)
{
int status;
/* Claim our 256 reserved device numbers. Then register a class
* that will key udev/mdev to add/remove /dev nodes. Last, register
* the driver which manages those device numbers.
*/
BUILD_BUG_ON(N_SPI_MINORS > 256);
status = register_chrdev(SPIDEV_MAJOR, "spi", &spidev_fops);
if (status < 0)
return status;
spidev_class = class_create(THIS_MODULE, "spidev");
if (IS_ERR(spidev_class)) {
unregister_chrdev(SPIDEV_MAJOR, spidev_spi_driver.driver.name);
return PTR_ERR(spidev_class);
}
status = spi_register_driver(&spidev_spi_driver);
if (status < 0) {
class_destroy(spidev_class);
unregister_chrdev(SPIDEV_MAJOR, spidev_spi_driver.driver.name);
}
return status;
}
module_init(spidev_init);
static void __exit spidev_exit(void)
{
spi_unregister_driver(&spidev_spi_driver);
class_destroy(spidev_class);
unregister_chrdev(SPIDEV_MAJOR, spidev_spi_driver.driver.name);
}
module_exit(spidev_exit);
MODULE_AUTHOR("Andrea Paterniani, ");
MODULE_DESCRIPTION("User mode SPI device interface");
MODULE_LICENSE("GPL");
MODULE_ALIAS("spi:spidev"); ————————————————
版权声明:本文为CSDN博主「海月汐辰」的原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接及本声明。
原文链接:https://blog.csdn.net/qq_37858386/article/details/119756871