FreeRTOS操作系统队列及队列API函数(五)
FreeRTOS学习总结
文章目录
- 前言
- 一、队列功能
-
- 1、数据存储
- 2、多任务访问
- 3、出队阻塞
- 4、入队阻塞
- 二、队列操作过程图示
-
- 1.创建队列
- 2、向队列发送第一个消息
- 3、向队列发送第二个消息
- 4、从队列中读取消息
- 二、API函数
-
- 1、队列创建函数
- 2、入队函数
- 1、函数 xQueueSend()、xQueueSendToBack()和 xQueueSendToFront()
- 2、队列操作实践
- 主要代码:
- 总结
前言
队列是为了任务与任务、任务与中断之间的通信而准备的,可以在任务与任务、任务与中
断之间传递消息,队列中可以存储有限的、大小固定的数据项目。任务与任务、任务与中断之
间要交流的数据保存在队列中,叫做队列项目。队列所能保存的最大数据项目数量叫做队列的
长度,创建队列的时候会指定数据项目的大小和队列的长度。由于队列用来传递消息的,所以
也称为消息队列。FreeRTOS 中的信号量的也是依据队列实现的!所以有必要深入的了解
FreeRTOS 的队列。
提示:以下是本篇文章正文内容,下面案例可供参考
一、队列功能
1、数据存储
通常队列采用先进先出(FIFO)的存储缓冲机制,也就是往队列发送数据的时候(也叫入队)永
远都是发送到队列的尾部,而从队列提取数据的时候(也叫出队)是从队列的头部提取的。但是
也可以使用 LIFO 的存储缓冲,也就是后进先出,FreeRTOS 中的队列也提供了 LIFO 的存储缓
冲机制。
数据发送到队列中会导致数据拷贝,也就是将要发送的数据拷贝到队列中,这就意味着在
队列中存储的是数据的原始值,而不是原数据的引用(即只传递数据的指针),这个也叫做值传
递。
2、多任务访问
队列不是属于某个特别指定的任务的,任何任务都可以向队列中发送消息,或者从队列中
提取消息。
3、出队阻塞
当任务尝试从一个队列中读取消息的时候可以指定一个阻塞时间,这个阻塞时间就是当任
务从队列中读取消息无效的时候任务阻塞的时间。出队就是就从队列中读取消息,出队阻塞是
针对从队列中读取消息的任务而言的。
eg、任务 A 用于处理串口接收到的数据,串口接收到数
据以后就会放到队列 Q 中,任务 A 从队列 Q 中读取数据。但是如果此时队列 Q 是空的,说明
还没有数据,任务 A 这时候来读取的话肯定是获取不到任何东西,那该怎么办呢?任务 A 现在
有三种选择,一:二话不说扭头就走,二:要不我在等等吧,等一会看看,说不定一会就有数
据了,三:死等,死也要等到你有数据!
*1.*如果阻塞时间为0就是不阻塞,没有数据的话会马上返回任务继续执行接下来的代码。
2、如果阻塞时间为 0~ portMAX_DELAY,当任务没有从队列中获
取到消息的话就进入阻塞态,阻塞时间指定了任务进入阻塞态的时间,当阻塞时间到了以后还没有接收到数据的话就退出阻塞态,返回任务接着运行下面的代码,如果在阻塞时间内接收到了数据就立即返回,执行任务中下面的代码
3、当阻塞时间设置为portMAX_DELAY 的话,任务就会一直进入阻塞态等待,直到接收到数据为止!
4、入队阻塞
入队说的是向队列中发送消息,将消息加入到队列中。和出队阻塞一样,当一个任务向队
列发送消息的话也可以设置阻塞时间。
二、队列操作过程图示
1.创建队列
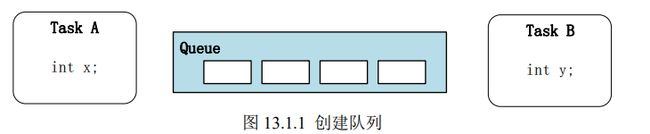
图 13.1.1 中任务 A 要向任务 B 发送消息,这个消息是 x 变量的值。首先创建一个队列,并
且指定队列的长度和每条消息的长度。这里我们创建了一个长度为 4 的队列,因为要传递的是
x 值,而 x 是个 int 类型的变量,所以每条消息的长度就是 int 类型的长度,在 STM32 中就是 4
字节,即每条消息是 4 个字节的。
2、向队列发送第一个消息

任务 A 的变量 x 值为 10,将这个值发送到消息队列中。此时队列剩余长度就是3 了。前面说了向队列中发送消息是采用拷贝的方式,所以一旦消息发送完成变量 x 就可以再次被使用,赋其他的值。
3、向队列发送第二个消息

图 13.1.3 中任务 A 又向队列发送了一个消息,即新的 x 的值,这里是 20。此时队列剩余长
度为 2。
4、从队列中读取消息

中任务 B 从队列中读取消息,并将读取到的消息值赋值给 y,这样 y 就等于 10了。任务 B 从队列中读取消息完成以后可以选择清除掉这个消息或者不清除。当选择清除这个消息的话其他任务或中断就不能获取这个消息了,而且队列剩余大小就会加一,变成 3。如果
不清除的话其他任务或中断也可以获取这个消息,而队列剩余大小依旧是 2。
先发送的先读取,后发送的后读取
二、API函数
1、队列创建函数
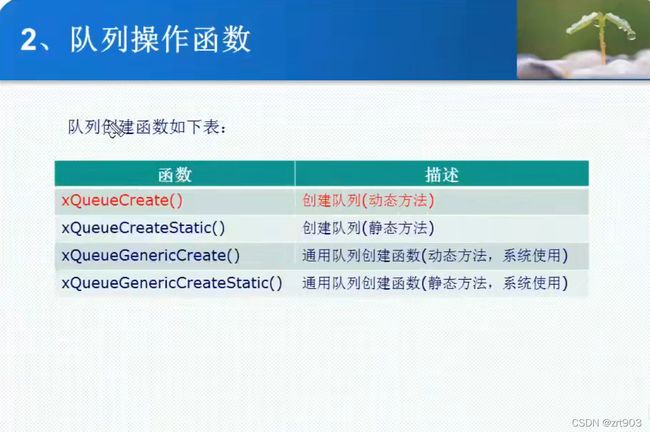
函数 xQueueCreate()
QueueHandle_t xQueueCreate(UBaseType_t uxQueueLength,
UBaseType_t uxItemSize)
参数:
uxQueueLength:要创建的队列的队列长度,这里是队列的数量
uxItemSize: 队列中每个项目(消息)的长度,单位为字节 队列创捷成功以后返回的队列句柄!
NULL: 队列创建失败
2、入队函数
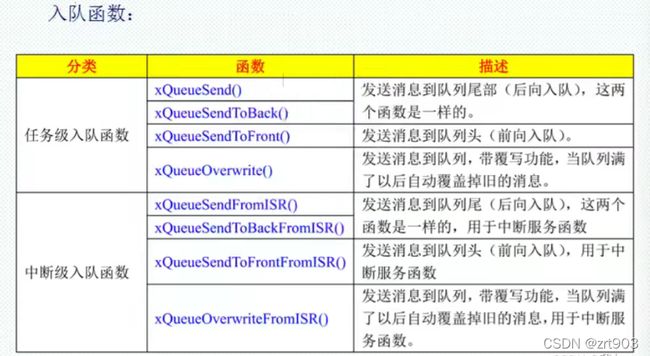
中断级一般不使用
1、函数 xQueueSend()、xQueueSendToBack()和 xQueueSendToFront()
这三个函数都是用于向队列中发送消息的,这三个函数本质都是宏,其中函数 xQueueSend()
和 xQueueSendToBack()是一样的,都是后向入队,即将新的消息插入到队列的后面。函数
xQueueSendToToFront()是前向入队,即将新消息插入到队列的前面。然而!这三个函数最后都
是调用的同一个函数:xQueueGenericSend()。这三个函数只能用于任务函数中,不能用于中断
服务函数,中断服务函数有专用的函数,它们以“FromISR”结尾,这三个函数的原型如下:
BaseType_t xQueueSend( QueueHandle_t xQueue,
const void * pvItemToQueue,
TickType_t xTicksToWait);
BaseType_t xQueueSendToBack(QueueHandle_t xQueue,
const void* pvItemToQueue,
TickType_t xTicksToWait);
BaseType_t xQueueSendToToFront(QueueHandle_t xQueue,
const void *pvItemToQueue,
TickType_t xTicksToWait);
xQueue: 队列句柄,指明要向哪个队列发送数据,创建队列成功以后会返回此队列的
队列句柄。
pvItemToQueue:指向要发送的消息,发送时候会将这个消息拷贝到队列中。
xTicksToWait: 阻塞时间,此参数指示当队列满的时候任务进入阻塞态等待队列空闲的最大
时间。如果为 0 的话当队列满的时候就立即返回;当为 portMAX_DELAY 的
话就会一直等待,直到队列有空闲的队列 项,也就是死等,但是宏
INCLUDE_vTaskSuspend 必须为 1。
返回值:
pdPASS: 向队列发送消息成功!
errQUEUE_FULL: 队列已经满了,消息发送失败。
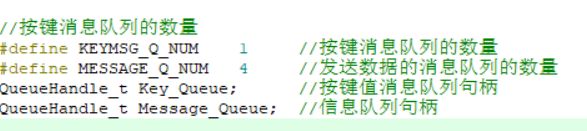
2、队列操作实践
主要代码:
任务与任务之间:
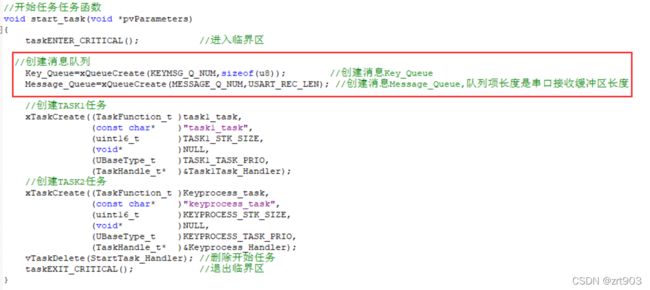
发送:

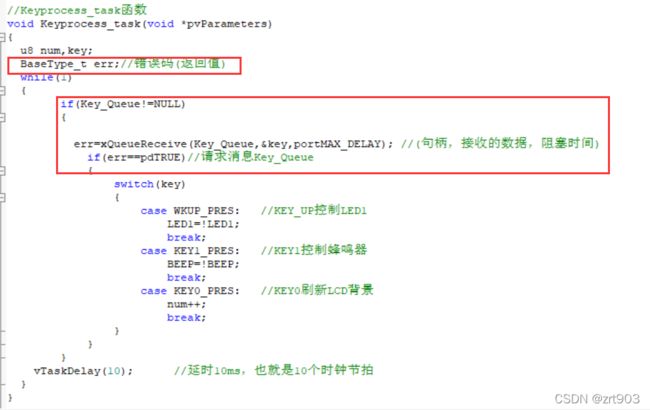
接收:
阻塞时间采用死等的方式
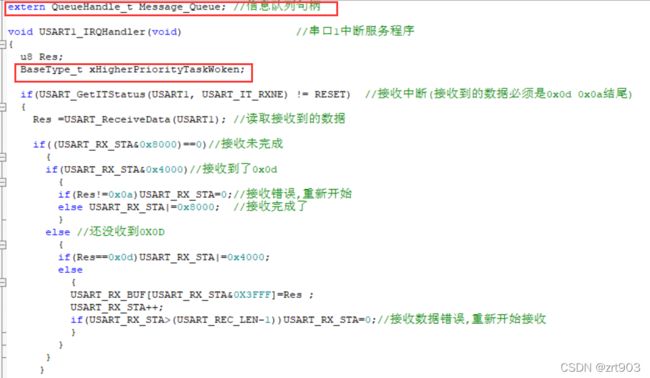
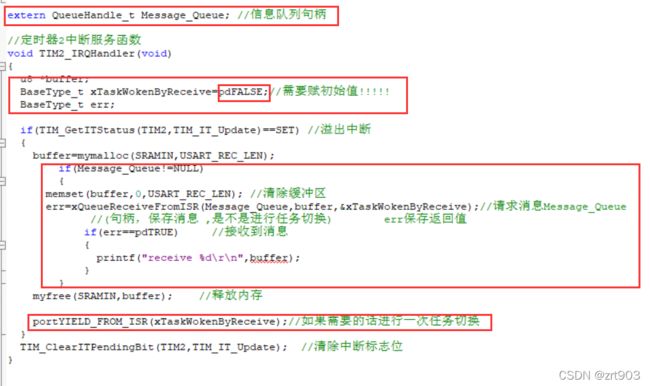
(串口)中断发送:
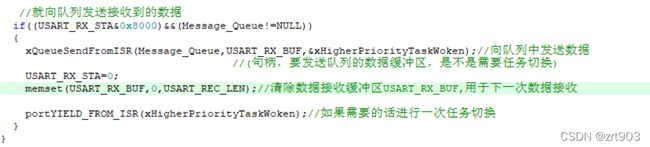
定时器接收:
总结
今天学习了队列的具体操作以及API函数的应用,要注意的是参数的使用方法。
继续加油!