FreeRTOS深入教程(任务的引入及栈的作用)
文章目录
- 前言
- 一、任务的引入
- 二、深入理解C语言函数的调用
-
- 1.ARM架构
- 2.基础汇编指令
- 3.函数运行流程分析
- 三.保存现场的几种情况
-
- 1.函数调用
- 2.中断处理
- 3.任务切换
- 总结
前言
本篇文章开始带大家深入学习FreeRTOS,带大家学习什么是任务,并且深入学习栈的作用。
一、任务的引入
在 FreeRTOS 中,任务(Task)是一个基本的执行单元,它代表了一个并行执行的工作单元。FreeRTOS 是一个实时操作系统,允许你创建多个任务,每个任务都有自己的代码、堆栈和优先级。这些任务可以独立运行,以实现多任务并发。
以下是关于 FreeRTOS 任务的一些关键概念:
任务的特点:
每个任务都有自己的独立堆栈,用于保存任务的局部变量和上下文信息。
任务可以具有不同的优先级,操作系统根据任务的优先级来调度它们的执行。
任务可以是无限循环的,也可以在完成其工作后自行删除。
每个任务都有一个唯一的任务句柄,可以用于管理和控制任务。
二、深入理解C语言函数的调用
1.ARM架构
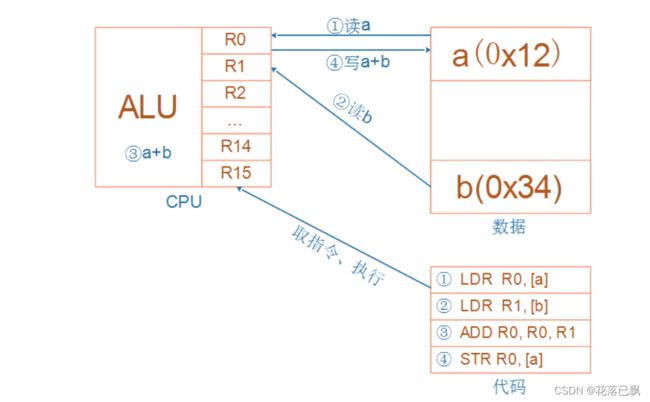
在我们看来执行a+b是一件非常简单的事情,但是在CPU的内部却做了非常多的操作。
CPU运行时,先去Flash上取得指令,再执行指令:
- 把内存a的值读入CPU寄存器R0
- 把内存b的值读入CPU寄存器R1
- 把R0、R1累加,存入R0
- 把R0的值写入内存a
2.基础汇编指令
LDR(Load Register):
LDR 指令用于将数据从内存加载到寄存器中。
典型的 LDR 指令的语法:LDR Rd, [Rn, #Offset],其中 Rd 是目标寄存器,Rn 是基址寄存器,Offset 是偏移量。
举例:LDR R0, [R1, #4] 表示将存储在地址 (R1 + 4) 处的数据加载到 R0 寄存器中。
STR(Store Register):
STR 指令用于将寄存器中的数据存储到内存中。
典型的 STR 指令的语法:STR Rd, [Rn, #Offset],其中 Rd 是源寄存器,Rn 是基址寄存器,Offset 是偏移量。
举例:STR R0, [R1, #4] 表示将 R0 寄存器中的数据存储到地址 (R1 + 4) 处。
ADD(Add):
ADD 指令用于将两个操作数相加,并将结果存储在目标寄存器中。
典型的 ADD 指令的语法:ADD Rd, Rn, Operand2,其中 Rd 是目标寄存器,Rn 是第一个操作数寄存器,Operand2 是第二个操作数。
举例:ADD R0, R1, #10 表示将 R1 寄存器中的值与 10 相加,并将结果存储在 R0 中。
POP:
POP 指令用于从栈中弹出多个寄存器的值。
POP 指令的操作是根据栈指针(通常是 SP 寄存器)从栈中弹出值,同时更新栈指针。
通常用于函数返回时,以恢复之前保存的寄存器状态。
POP {R3, PC}

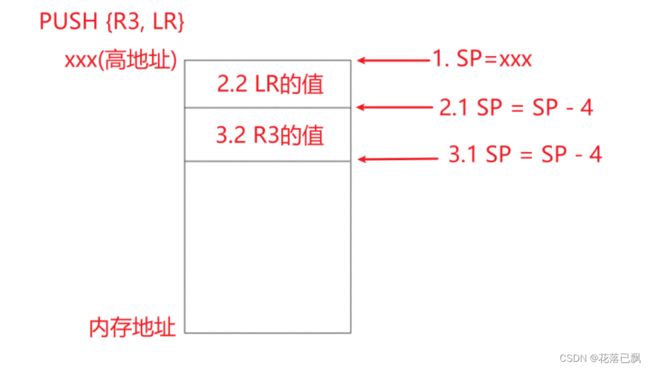
PUSH:
PUSH 指令用于将多个寄存器的值推送(压入)到栈上。
PUSH 指令的操作是根据栈指针(通常是 SP 寄存器)将值压入栈中,同时更新栈指针。
通常用于函数调用时,以保存当前寄存器状态。
PUSH {R3, LR}
3.函数运行流程分析
在keil5中编写一个加法函数:
/* a = a + b */
void add_val(int *pa, int *pb)
{
//*pa = *pa + *pb;
volatile int tmp;
tmp = *pa;
tmp = tmp + *pb;
*pa = tmp;
}
int a = 1;
int b = 2;
add_val(&a, &b);
汇编代码:

汇编代码分析:
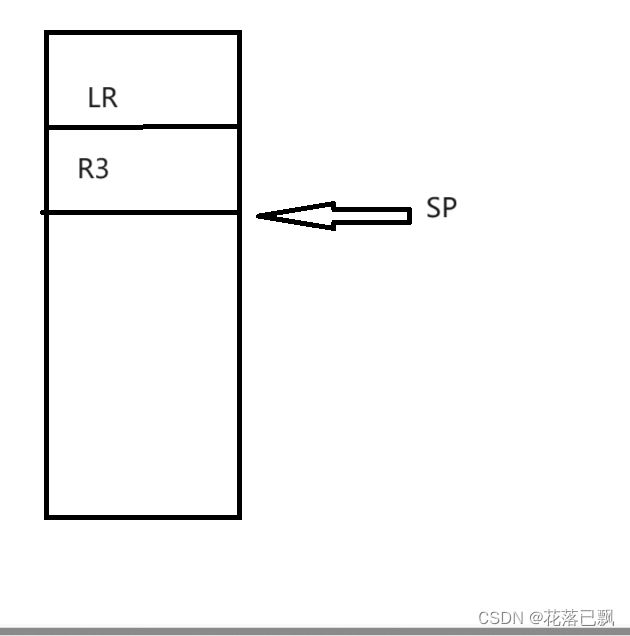
首先执行PUSH {r3,lr}命令
将r3寄存器的值和lr返回地址保存到了栈中。
r3就是局部变量tmp的值。
tmp = *pa;
LDR r2,[r0,#0x00] 读取r0的值到r2中,也就是将*pa读取到r2中。
STR r2,[sp,#0x00] 将r2的值保存到sp+0x00地址处也就是将*pa保存到tmp中。
完成tmp = *pa;赋值语句
tmp = tmp + *pb;
LDR r2,[r1, #0x00] 读取r1的值到r2中,也就是将*pb读取到r2中
LDR r3,[sp,#0x00] 读取sp+0x00的值到r3中,也就是将tmp读取到r3中
ADD r2,r2,r3 将r2+r3的和保存到r2中,也就是将*pb + tmp的值保存到r2中
STR r2,[sp,#0x00] 将r2的值保存到sp中也就是tmp = *pb + tmp
*pa = tmp;
LDR r2,[sp,#0x00] 读取sp+0x00的值保存到r2中,也就是将tmp保存到r2中
STR r2,[r0,#0x00] 将r2的值保存到r0中,也就是*pa = tmp
POP {r3,lr}
出栈将lr的值返回给pc寄存器,执行下一条指令。
三.保存现场的几种情况
1.函数调用
当函数调用时R0,R1,R2通常被用来传递参数故不需要保存这几个寄存器的值。
void funA(void)
{
.........
funB(a, b);
}
2.中断处理
被中断打断时硬件会帮我们保存R0,R1,R2寄存器,其他寄存器需要通过软件来保存。
void funA(void)
{
->被中断打断
}
3.任务切换
当任务切换时需要保存所有的寄存器,因为任务并不知道会使用到哪些寄存器。
总结
本篇文章主要引入了任务及说明了栈在这里的作用。