服务机器人 开源
The future is coming, the days are getting more dynamic and we must be prepared with fast responses, but how machines will facilitate our lives? This article will show three situations that could answer this question, and you will see that robots will be our best friends, or maybe not.
未来即将到来,日子越来越多,我们必须做好快速React的准备,但是机器将如何改善我们的生活? 本文将展示三种可以回答这个问题的情况,您会发现机器人是我们最好的朋友,也许不是。
The structure of this article was separated into themes, this facilitates the reader’s experience. If the objective is to read one of them, the reader will not lose any connected information with the others. The themes are not related to each other but are correlated with the title described. Each theme has a detailed section, made by the author’s point of view. These sections are directly related to the theme (see that each section is a sequence of the topic under discussion) and address the content of possible development for the technology in question, mostly engaged in the engineering area. P.S.: The detailed sections are a supposed creation model referenced from articles, papers, and researches made by the author, and he truly recommends the hole reading for the best experience.
本文的结构分为主题,这有助于读者的体验。 如果目的是阅读其中一个,则阅读器不会与其他阅读器失去任何连接的信息。 主题互不相关,但与所描述的标题相关。 每个主题都有一个详细的部分,根据作者的观点进行划分。 这些部分与主题直接相关(请参见每个部分都是正在讨论的主题的序列),并涉及所涉及技术的可能开发的内容,这些技术主要涉及工程领域。 PS:这些详细的部分是从作者的文章,论文和研究中引用的一种假定的创造模型,他真正地建议您通读Kong以获得最佳体验。
The robots are already participating in our lives, like a vacuum cleaner, robotic lawn cutter, automated washing machines, barista, the Alexa virtual assistant, etc. These technologies are being part of us as a greater helper, making our lives more accessible with less time guided by rushing lives.
机器人已经参与了我们的生活,例如吸尘器,机器人割草机,自动洗衣机,咖啡师, Alexa虚拟助手等。这些技术已成为我们的一部分,成为了更强大的助手,使我们的生活更加便捷,事半功倍。匆忙的生活指引着时间。
Keeping this in mind, our environment will tend to be more autonomous, not just in the houses but in other places, airports, hospitals, universities, malls, industry, etc. This article will provide three environments that see the actual and future necessities on the robotic machines.
请牢记这一点,我们的环境将趋向于更加自治,不仅在房屋内,而且在其他地方,机场,医院,大学,购物中心,工业等。本文将提供三种环境,以了解实际和未来的需求。机器人机器。
无人驾驶飞机 (Drones)
This section presents the drone influences in the future for human lives, as a device with mobility, achieving places faster, helping on monitoring, and a lot of contributions.
本节介绍了无人机在未来对人类生活的影响,这是一种具有移动性的设备,可以更快地到达位置,帮助进行监控以及做出许多贡献。
Nowadays most work that drones does is, take pictures and films from the air, or being part of a racing league (DRL), totally under human control as being pilot of them. More than that, in the future, drones will be capable to do controlled jobs for themselves either.
如今,无人机所做的大部分工作是从空中拍摄照片和电影,或者成为赛车联盟( DRL )的一部分,而作为飞行员,它们完全处于人为控制之下。 不仅如此,在未来,无人机也将能够为自己做受控制的工作。
Drones will reach places easier, where humans can’t be, watch for persons and lost objects, do maintenance or identify problems far-away, communicate with other drones, people, even 3D printers, and delivering work sooner or later. The author would like to share some applications of these examples.
无人机将更容易到达人们无法到达的地方,监视人员和丢失的物体,进行维护或发现遥远的问题,与其他无人机,人员甚至3D打印机进行通信,以及迟早地交付工作。 作者希望分享这些示例的一些应用。
An important application when talking about hard places for humans to reach is that a drone will help with outbreaks of forest fires. They will be capable to discover the total compromised area, the level of the fire, and even predict if not respond rapidly, to the next damaged areas, while communicating in real-time with the owner and the firefighters. Using drones by security forces, it will be able to detect deforestation and the person responsible for it. Would be awesome if they could stop all fires throwing CO₂ fire extinguishers.
在谈论人类难以到达的地方时,一个重要的应用是无人机将有助于森林火灾的爆发。 他们将能够发现总的受损区域,火势,甚至可以预测下一个受损区域是否Swift做出React,同时与所有者和消防员进行实时沟通。 由安全部队使用无人机,它将能够检测到森林砍伐及其负责人。 如果他们能够阻止所有的火灾扑灭CO 2灭火器,那就太好了。
Especially in agrarian fields, these gears will help with planting seeds, livestock controlling through the voice, and other amazing ideas.
这些齿轮特别是在农业领域中,将有助于播种,通过声音控制牲畜以及其他令人惊奇的想法。
These mini-planes will detect f.e. lost objects, and people on accidents, will bee tremendously helpful. With sensors, drones will be possible to take part, in high voltage transmission lines, detecting troubles as short circuit problems, any intruder preventing the transmission of electricity, insulation, or mechanical problems either, etc.
这些微型飞机将探测到丢失的物体,事故中的人员将大为有益。 借助传感器,无人机将有可能参与高压输电线路,检测出诸如短路问题之类的故障,任何阻止电的传输,绝缘或机械问题的入侵者等。
Deliveries from Amazon will work on air transport in just 30 min or less (it pursuing air delivery since 2013) seeking on developing an automated drone with a flight management system with sensors and wireless communication. This kind of method is also being structured to help, some patients or clients, from Trikala (Greece) in the COVID-19 pandemic situation with pharmaceutical commerce (preventing the proliferation of viral contamination). The focus is to provide fast medicine distribution for those who need urgent medication and needs to be in social distancing.
亚马逊的交付将在短短30分钟或更短的时间内进行航空运输(自2013年开始追求航空交付),力求开发一种带有传感器和无线通信的飞行管理系统的自动无人机。 还正在构造这种方法,以帮助某些来自Trikala (希腊)的患者或客户通过制药商业(防止病毒污染扩散)来应对COVID-19大流行的情况。 重点是为需要紧急药物治疗且需要远离社会的人提供快速药物分发。
However, the FAA (Federal Administration Aviation) in the US, has a rigorous oversight to register a drone as a commercial carriage. It limits the drone scale, air altitude, the package weight, and a lot of rules in 319 pages of regulation. That’s why we til don’t see many drones flying yet. Indeed drones should bee on the pilot’s sight, avoiding accidents, watch out for threes, birds, electrical wires, buildings, and airplanes until drones are not totally automated.
然而,在美国的FAA(美国联邦航空管理局),有严格的监督,以注册一个无人驾驶飞机作为商业运输。 它限制了无人机的规模,空气高度,包裹的重量,和大量的规则在319页的监管。 这就是为什么我们直到看到很多无人机都没有飞行的原因。 的确,无人机应该成为飞行员的视线,避免发生事故,注意三叉戟,鸟类,电线,建筑物和飞机,直到无人机没有完全自动化。
无人机详细信息 (Drone Details)
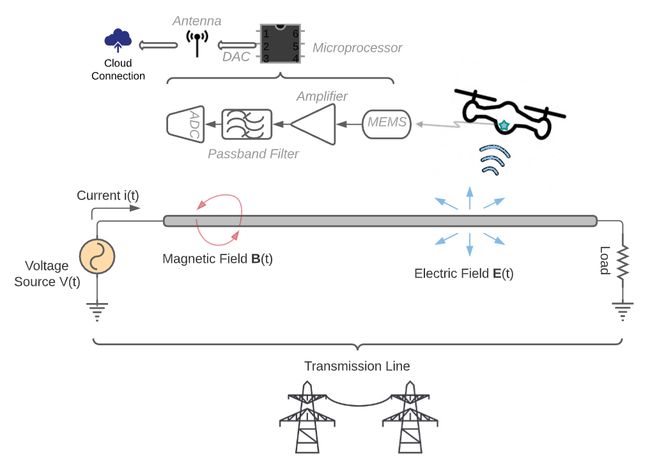
This section shows a hardware detail for drones, an approximation of a sensor system that detects the effective electric field of a high-voltage power line. Mainly motivated to detect if the transmission line is under electrical current flow requirements or not.
本部分显示了无人机的硬件详细信息,无人机是检测高压电力线有效电场的传感器系统的近似图。 主要用于检测传输线是否满足电流要求。
The most common sensor used on drones is ultrasound detection (is possible to see de transmitter and receiver circles on the image above). It possible for the drone to “know” if it is near to something, using the reflection of the sound waves. On the other side develop a sensor to detect electric field on high-voltage lines is required but using an ultrasound sensor is unavailable because of the accuracy.
无人机上最常用的传感器是超声波检测(可以在上图中看到发射器和接收器的圆圈)。 无人机可能会利用声波的反射“知道”它是否靠近某物。 另一方面,需要开发一种传感器来检测高压线路上的电场,但是由于精度的原因,无法使用超声波传感器。
The following electric field MEMS (Microelectromechanical System) sensor developed by the Vienna University of Technology, works with the physical movement of a mass layer fixed on a silicon structure. When an electric field is detected, the movable structure moves slightly out of perfect alignment with the fixed grid, allowing light to pass through the openings. This light is measured, from which the strength of the electric field can be calculated by an appropriately calibrated device.
由维也纳工业大学开发的以下电场MEMS(微机电系统)传感器可对固定在硅结构上的质量层进行物理运动。 当检测到电场时,可移动结构会稍微移动,与固定栅格完全不对齐,从而使光线穿过开口。 测量该光,可以通过适当校准的设备从中计算出电场强度。
The interesting thing about this device is that it substitutes any antenna detection system, with less conditioning circuits, fewer filters, and others. while the drone gets closer to the transmission line, the electric field increase, and the array deflects more.
该设备的有趣之处在于,它可以用更少的调节电路,更少的滤波器等替代任何天线检测系统。 当无人驾驶飞机靠近传输线时,电场增加,阵列偏转更大。

An AC (Alternate Current) signal on transmission lines, has a frequency equal or under 60 Hz (depend on the country). The electric fields, depend on, the magnitude of the voltage in each conductor, the distance between each conductor, and the height of the ground (high influence of the earth capacitance of the ground). The sensor seems not to have any trouble with strong variances from high voltages. As research says, the silicon can measure under 200 Volts per meter, allowing to sense the field far away from. Knowing that, depending on the transmission, some lines conduct, hundreds of voltage in 30 meters of line.
传输线上的AC(交流)信号的频率等于或低于60 Hz (取决于国家/地区)。 电场取决于每个导体中电压的大小,每个导体之间的距离以及地的高度(对地的接地电容的强烈影响)。 传感器似乎不会因高压变化很大而遇到任何麻烦。 正如研究所说,硅片每米可以测量200伏以下的电压,从而可以感应远离的磁场。 知道,取决于传输方式,一些线路会在30米的线路中传导数百个电压。
The chart below shows the sensor processing by a drone, implemented by the author’s point of view of a possible application. The quantitative measurement is dictated to an ADC (Analog to Digital Converter), since the electric field changes in time with a frequency of 60 Hz the light will wave in this frequency too. The conversion will allow to the microprocessor interprets better the digital signal after converted.
下图显示了无人机对传感器的处理过程,并根据作者对可能应用程序的观点进行了处理。 定量测量取决于ADC(模数转换器),因为电场随频率以60 Hz的频率变化,所以光也会以该频率波动。 转换将允许微处理器在转换后更好地解释数字信号。
Depending on the results, the robot will detect the exact point that the transmission line has a power drop, short circuit, any interruptions, and transmit to a central system for a response.
根据结果,机器人将检测出传输线出现功率下降,短路,任何中断的确切点,并将其传输到中央系统以进行响应。
行业 (Industry)
This section presents the behavior in firms that adopt robots or not in their production process, how this can be well performed, the influence on the development of the organization at all, and finally how to be prepared for the new industry revolutions coming.
本节介绍了在生产过程中是否采用机器人的公司的行为,如何很好地执行,对组织发展的影响以及如何为即将到来的新行业革命做准备。
According to a study, there are more than 90% of all SME (small and medium enterprises) in the EU, that use industrial manufacturing. These total number indicates that the companies cannot assembly the total process automated, and there are many reasons for it, as the International Federation of Robotics (IFR) declares. As claimed by the Robotic Industries Association source too, the most common questions are that, if robots are too expensive, if the business is too small for a robot, if it is difficult to operate, etc. Without contest, any impediments in adopting the robots should delay the growth and development of a firm.
根据研究,有全SME(中小型企业)在欧盟,使用工业制造的90%以上。 这些总数表明公司无法自动组装整个过程,并且有很多原因,正如国际机器人联合会( IFR )所宣布的那样。 正如机器人工业协会的消息来源所声称的那样,最常见的问题是,如果机器人价格昂贵,对于机器人来说业务规模太小,很难操作等,那么在没有竞争的情况下,采用机器人的任何障碍都将受到阻碍。机器人应该延迟公司的成长和发展。
Industrial automation systems for assembly operations have to integrate the required human capabilities having the characteristics of robotic automation such as strength, velocity, predictability, repeatability and precision.
用于装配操作的工业自动化系统必须集成具有机器人自动化特征(例如强度,速度,可预测性,可重复性和精度)的所需人员能力。
Nowadays the big companies are mostly characterized by controlling and automation (an electrical engineering method for industrial operations unnecessary supervised by a human) process, even with robots or the simpler PLC (Programmable Logic Controller). The machines operate to produce the final assembly, and the orders are dictated from the main controller system.
如今,大公司的主要特征是控制和自动化(一种无需人为监督的工业操作的电气工程方法)过程,即使是使用机器人或更简单的PLC (可编程逻辑控制器)也是如此。 机器运行以产生最终组件,并且订单由主控制器系统决定。
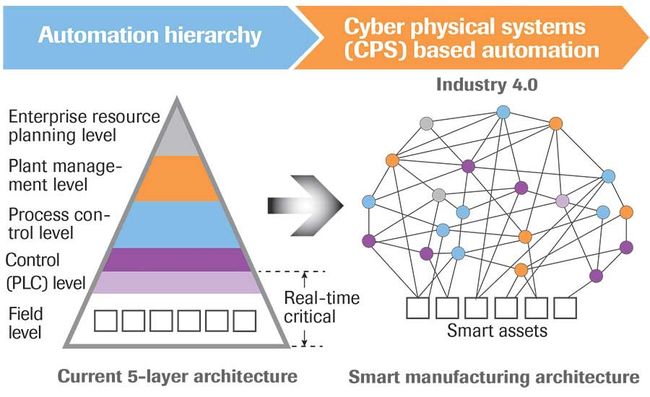
An important thing to cite is that the original pyramidal model for PLC automated production (see image below) is getting obsolete compared to the cyber-physical automated system (CPS) as days passing by. Some portion of controls will be done remotely and in real-time as connected to the cloud, then smart responses will turn the industrial production more effective. Everything connected.
值得一提的是,随着时间的流逝,与网络物理自动化系统( CPS )相比, PLC自动化生产的原始金字塔模型(参见下图)变得过时了。 控制的一部分将在连接到云后进行远程和实时控制,然后智能响应将使工业生产更加有效。 一切都连接。
But let’s return on robots' systems. Before the idea of the total adoption of the robot in industrial production, there will be increasing robot-human interaction in this field as a study mentioned before. This will be the transition period of smart automation. A kind of semi-automated smart production.
但是,让我们回到机器人的系统上。 总采用工业生产机器人的想法之前,作为会有增加在这一领域的机器人人机交互研究之前提到的。 这将是智能自动化的过渡时期。 一种半自动化的智能生产。
The project of the study reveals that the robot will interact with a human to improve the production process, with three concepts. First, relates that while in a common workspace, human and robot will execute different tasks, and no physical safety devices need to be present since the robot is always aware of the human presence by using the plethora of force, vision or presence sensors. Second, the robot will be able to help with organizing problems and, match correct parts of an assembly, thus reducing time on identifying. Third, will combinate human skills, such as perception or dexterity with the robot's strength, accuracy, and repeatability.
研究项目揭示了机器人将与人类互动以改善生产过程的三个概念。 首先,涉及到在一个共同的工作空间中,人和机器人将执行不同的任务,并且不需要存在任何物理安全装置,因为机器人通过使用过多的力,视觉或存在传感器始终知道人类的存在。 其次,机器人将能够帮助组织问题并匹配装配的正确零件,从而减少了识别时间。 第三,将诸如感知或灵巧之类的人类技能与机器人的强度,准确性和可重复性相结合。

In long term, robots will not respond to a “cascade” process and probably no humans around. This means that the second robot in a production process will respond even if the first had finished or not. Indeed robot not working in industrial production is cashless. In practice, each robot will have your own operation to be controlled and control, to not waste time. Obviously that all robots will be connected to your central system (physical or online), but each robot will work for itself, adjusting some “behaviors” by sensors, f.e., artificial intelligence for learning and optimization, accelerating, and accurate process.
从长远来看,机器人将不会对“级联”过程做出响应,并且可能没有人在附近。 这意味着即使第一个机器人已经完成,生产过程中的第二个机器人也会响应。 确实,不在工业生产中工作的机器人是没有现金的。 在实践中,每个机器人都会有自己的操作要进行控制和控制,以免浪费时间。 显然,所有机器人都将连接到您的中央系统(物理或在线),但每个机器人都将自己工作,通过传感器,有限元,人工智能进行学习和优化,加速和精确过程的调整,从而“调整行为”。
The robot will be part of symbiotic automation. This means that the robot will part of an ecosystem, that has its own importance, will relate with other robots and systems, make own decisions, connect with the cloud, and will probably ask the Engineer: “How can I help you Ítalo?”, “Everything is fine? or “My job was well done?”
该机器人将成为共生自动化的一部分。 这意味着该机器人将成为具有其重要性的生态系统的一部分,将与其他机器人和系统相关联,做出自己的决定,与云连接,并可能会问工程师:“我如何才能帮助您?talo?” , “一切都很好? 或“我的工作做得好吗?”
So the number of the robot will tend to decrease in number but an increase in “behavior”, tending to do more jobs than usual if it can. The robot’s effectiveness, precision, energy efficiency, human security, more dynamic structure (better response of the movement system i.e., higher number of joints), it’s weight, and a wireless connection must be optimized to maintain the production flow in the next years. So the robots would be, in the hierarchical model, the two bottom levels together, and in CPS, anywhere. This will certainly mark the Industry 4.0!
因此,机器人的数量将趋于减少,而“行为”则会增加,并且如果可能的话,往往会比平时做更多的工作。 机器人的效率,精度,能效,人的安全性,更动态的结构(运动系统更好的响应,即,更多的关节数量),重量和无线连接都必须进行优化,以维持未来的生产流程。 因此,在分层模型中,机器人将位于两个底层,而在CPS中则位于任何位置。 这肯定会标志着工业4.0!
工业机器人详细信息 (Industrial Robot Details)
This section will provide detailed information about robots using a machine vision sensor. This technology will increase the precision of detection, responses to changes, and constructions.
本节将提供有关使用机器视觉传感器的机器人的详细信息。 该技术将提高检测的准确性,对变化的响应和构造。
It is known that already exists algorithms such as computer vision from deep learning on AI (Artificial Inteligence), for object detection, and precisely classify it. The problem is that the efficiency of the software, algorithm routines, must be high leveled if the technology does not correspond. Nowadays it is totally useful the cameras as a device for controlling the response of a robot. The majority of these cameras dictate the region of security to the robot environment. Nevertheless, such cameras don’t have the best precision, because it uses lenses for light manipulations in macroscale. An infrared detection could be well performed, but won’t satisfy some detections in robot-human interaction that will be in the discussion. And if the robot is going to weld a 2-millimeter chip f.e., the camera seems to be not useful.
据了解,已经存在的算法,如从深度学习的AI(人工智能智力)计算机视觉,物体检测,并精确地对其进行分类。 问题在于,如果技术不匹配,则必须提高软件,算法例程的效率。 如今,将相机用作控制机器人响应的设备已完全有用。 这些相机中的大多数决定了机器人环境的安全区域。 但是,此类相机的精度最高,因为它使用镜头进行宏观的光控制。 红外检测可以很好地执行,但不能满足将在本文中讨论的机器人与人的交互中的某些检测。 而且,如果机器人要焊接2毫米的芯片fe,则相机似乎无用。
One interesting sensor is the IWR1443 from Texas Instruments (2018). As documents say, the CMOS silicon package is totally able to detect objects regardless of lighting, humidity, smoke, and dust on the factory floor, they are well suited to replace vision systems. This possible to the robot work in many industrial situations automatically even interacting with a human.
一种有趣的传感器是德州仪器( 2018 )的IWR1443 。 如文件所述,CMOS硅封装完全能够检测物体,而不论工厂车间的光线,湿度,烟雾和灰尘如何,它们非常适合替代视觉系统。 机器人可以在许多工业环境中自动工作,甚至可以与人互动。
Not just the reach range, for each detection, the integrated circuit do mathematical operations, such as derivating the distance to velocity and derivating velocity to angle arrival. With these features, the mmWave sensor can also detect glass walls and objects beyond movement.
对于每次检测,集成电路不只是到达范围,还进行数学运算,例如求出速度的距离和求出角速度的速度。 借助这些功能, mmWave传感器还可以检测玻璃壁和物体是否运动。
It uses the FMCW (Frequency Modulated Continuous Wave) ultra-accurate radar methodology, that detects the frequency changes when the electromagnetic field reflects from the object. If the object is on movement, compared with the receptor antenna, it detects de Doppler frequency changes by its velocity. This dephased signal received is compared with the transmitted, and the ARM Cortex-R4F microprocessor does the processing job.
它使用FMCW(调频连续波)超精确雷达方法,可在电磁场从物体反射回来时检测频率变化。 如果物体在运动,则与接收天线相比,它会通过速度检测多普勒频率的变化。 将接收到的此去相位信号与发送的信号进行比较,然后ARM Cortex-R4F微处理器执行处理工作。
In the block-schematic above, illustrated with colored arrows, shows the “way” for transmission and reception signal, into the mmWave sensor.
在上面的方框图中,用彩色箭头表示,显示了进入毫米波传感器的发送和接收信号的“路径”。
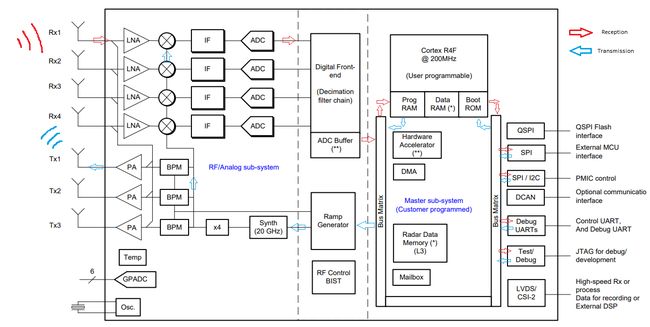
The transmission signal (preprogrammed), signed by the blue arrow, flow from the far-right peripherals protocols communications (SPI, I2C, UART…), controlled by Cortex, to the RF/Analog sub-system, and then turning into a pulse generated for transmission (76 GHz - 81 GHz). The signal reception, signed by the red arrow, must pass thru an LNA (Low Noise Amplifier), mix with the transmitted signal, pass by IF (another mixer, a filter, and amplifier), convert it to digital, buffer it, and return to the Cortex. The A2D of the receiver has a resolution of 12 bits, giving 4096 levels of digitization in voltages (resolution of 805.66 µV if the sensor is power with 3.3 V). The image below extracted from TI (Texas Instruments), reveal the machine vision experiment of the turtle robot.
由蓝色箭头标记的传输信号(已预编程)从受Cortex控制的最右边的外围设备协议通信( SPI,I2C,UART… )流向RF /模拟子系统,然后变成脉冲产生用于传输( 76 GHz-81 GHz )。 用红色箭头标记的信号接收必须通过LNA(低噪声放大器),与发送的信号混合,通过IF(另一个混频器,滤波器和放大器r),将其转换为数字信号,进行缓冲,然后返回皮质。 接收器的A2D分辨率为12位,可提供4096级电压数字化(如果传感器采用3.3 V供电,则分辨率为805.66 µV )。 下图摘自TI( Texas Instruments )的图像,揭示了乌龟机器人的机器视觉实验。
Knowing that the IWR1443 sensor has a range between 4 cm to 40 m, a robot can use it for detecting an object in approximation, if there is a human behind any object, if there is an object falling, classifying them, respond to a human movement. The implementation of this technology will guarantee or at least approximate to the future of robotics on factories by human and machines better interactions.
知道IWR1443传感器的范围是4 cm到40 m之间,机器人可以使用它来近似检测物体,如果在任何物体后面有人,如果有物体掉下来,对它们进行分类,对人类做出React运动。 这项技术的实施将保证或至少近似于人机交互的工厂机器人技术的未来。
卫生保健 (Healthcare)
This section will present the generation of the robotics system in the medical environment and the future of them. These machines will be capable to do surgery even if there is a doctor near or not.
本节将介绍医疗环境中机器人技术的产生以及它们的未来。 这些机器即使没有医生在场也可以进行手术。
While old age increases with time, the number of medical attendance will follow this trend. When talking about surgery, it demands a lot of time to prepare the patient, the surgery (sometimes can take over a day, depending on the difficult), the recovery process, etc. With this in mind, the attendance will saturate, and none logistics will support it faster, commonly in the oldest country. A situation like this is imaginable if a pandemic like COVID-19 occurs in parallel.
随着年龄的增长,随着时间的推移,就诊人数将遵循这一趋势。 在谈论手术时,需要花费大量时间为患者做准备,手术(有时可能要花一天时间,具体取决于难度),恢复过程等。因此,出勤率会达到饱和,并且没有物流将更快地支持它,通常在最古老的国家/地区。 如果像COVID-19这样的大流行同时发生,这种情况是可以想象的。
With the technology on evolution is expected that robots will be “responsible” for some surgeries. Why is that? Because first, will not be influenced by their own’s “emotions”, second the robot will do the precisive, measurements, incisions, suture, etc, and third, the robot will be capable to do in less time. The robotic surgery or robot-assisted surgery will improve open surgeries with more flexibility, less invasive, prevent infections, and others, according to UCLA Health.
随着技术的不断发展,预计机器人将对某些手术“负责”。 这是为什么? 因为第一,不受自身“情感”的影响,第二,机器人将进行精确,测量,切口,缝合等操作,第三,机器人将能够在更短的时间内完成操作。 根据UCLA Health的说法,机器人手术或机器人辅助手术将以更大的灵活性,更少的侵入性,预防感染等改善开放式手术。
Telesurgery is becoming recurrent in hospitals, especially those that require less invasive methods. But not as new as the dual and synchronous time (Transanal Total Mesorectal Excision) surgery (a type of laparoscopic surgery) performed on EndoSurgical Center of Florida, assisted by two robot systems, The Versius (CMR Surgical, Inc. Cambridge, UK), as article publication describes. The two field operations were done successfully in 195 minutes and showed the feasibility of the simultaneously docked robot system.
远程手术在医院中变得越来越普遍,尤其是那些需要较少侵入性方法的医院。 但还没有像在Versius( CMR Surgical,Inc. Cambridge,UK )这两个机器人系统的协助下,在佛罗里达州的EndoSurgical Center上进行的双重和同步时间(经肛门全直肠系膜切除术)手术(一种腹腔镜手术)那样新颖,如文章出版物所述。 两次现场操作均在195分钟内成功完成 并展示了同时对接机器人系统的可行性。

In the author’s opinion, before the robotic systems are totally autonomous, will be the remote surgeon. Knowing that is possible to control the robot with the proximal console in the surgery room, IoT already changing lives, 5G signal arriving, it will be totally possible to control remotely f.e., surgery on hospitals (that the main robots will be at first) and even patient’s house (when robots turn more practice) with the professional on their homes. This will minimize drastically human contact, decreasing infections.
作者认为,在机器人系统完全自治之前,将是远程医生。 知道可以通过手术室中的近端控制台来控制机器人,物联网已经改变了生活, 5G信号到达后,完全有可能远程控制医院的外科手术(首先是主要的机器人),以及甚至是患者家中(当机器人进行更多练习时)与专业人员一起在家中。 这将最大程度地减少与人的接触,从而减少感染。
The most recent remote surgery operation was done during the 5G Healthcare Vodafone Conference & Experience Day. The surgery was performed from the theatre stage of the Vodafone Village, where Professor Matteo Trimarchi carried out a procedure used to treat diseases affecting the vocal cords on a synthetic larynx model at the San Raffaele hospital, at the opposite side of the city.
最近的远程手术操作是在5G Healthcare沃达丰会议暨体验日期间完成的。 该手术是在沃达丰村的剧院舞台上进行的,在那里,Matteo Trimarchi教授在该市对面的San Raffaele医院进行了一种治疗喉道疾病的手术,该手术采用合成喉模型。
But the idea of the autonomous robot on medicine has already started. An autonomous robot was developed by Neuralink from Elon Musk to do an implant surgery of an electrode on the brain to detect neural signals totally automated.
但是,关于药物的自主机器人的想法已经开始。 Neuralink由埃隆·马斯克(Elon Musk )开发了一种自主机器人,用于对大脑上的电极进行植入手术,以检测全自动的神经信号。
With the Future of Medicine, more accessible robot systems, devices, sensors, medicine delivery drones, portable scanners, etc, will be easy for any human to handle on their own on taking care of their health, without exposing themselves to a crowded hospital. At this time, telemedicine will be crucial to make the patient’s life more secure and easy to handle.
借助“医学的未来” ,任何人只要照顾好自己的健康就可以轻松地使用更容易接近的机器人系统,设备,传感器,送药无人机,便携式扫描仪等,而无需将自己暴露在拥挤的医院中。 此时,远程医疗对于使患者的生命更加安全和易于处理至关重要。
手术机器人详细信息 (Surgical Robot Details)
This section is motivated to show some aspects of material, hardware, and technology for reducing the surgeon robot prices.
本节的目的是展示一些材料,硬件和技术方面的内容,以降低外科医生机器人的价格。
The da Vinci surgical system robot is capitalized from U$2,600,000.00 Dollars (page 69). For most hospitals, this is a high investment, and sometimes, unfortunately, is not adopted, even if the “return” seems to be better for both, patient and hospital as customer service. This price is equal to buy five Siemens Verio MRI (Magnet Resonant Imaging) machines.
达芬奇外科手术机器人的资本金为2,600,000.00美元(第69页)。 对于大多数医院来说,这是一笔很高的投资,有时甚至不幸的是,即使“回报”对于患者和医院作为客户服务而言似乎都更好,但有时还是没有采用。 此价格等于购买五台西门子Verio MRI(磁共振成像)机器。

The robot has four arms, so with less invasive surgery in mind, the focus is to reduce as much as it can the number of the holes for the tweezers, knowing that the holes for the insertions are 1.5 cm larger. The arms help using different kinds of surgery instruments, and one of them is for the camera which is the most expensive.
该机器人有四个臂,因此考虑到侵入性较小的手术,重点是要尽可能减少镊子的Kong数,因为要知道插入物的Kong要大1.5厘米。 手臂有助于使用各种手术器械,其中一种是最昂贵的相机。
The idea of the project is to reduce any electric wires, DC motors (Direct Current motors), large materials, inside of the chamber, and make three instrument arms into one (the arms can be coupled any kind of surgeon instrument). It would be multifunctional as that three colors pens into one, that people use. Okay, the idea is too good to be true but is good.
该项目的想法是减少腔室内的任何电线,直流电动机(直流电动机),大材料,并将三个器械臂合为一体(这些臂可以与任何类型的外科手术器械连接)。 人们将三种颜色的笔合为一,这将是多功能的。 好吧,这个主意太好了,难以置信,但很好。
The follow idea inspired the author to think of an alternative to the robotic arm. Some trains have elevation technology, being controlled by electromagnets allowing the train to move and avoiding friction with the track. Propulsion is performed through coils that alternately generate the movement of the train.
跟随思想启发了作者想出一种替代机械臂的方法。 一些列车具有高程技术,由电磁体控制,允许列车移动并避免与轨道发生摩擦。 通过交替产生列车运动的线圈来执行推进。
Playing with magnets with a tiny bulkhead, table, or screen, it is totally possible to control the magnet that is not directly under control, just with the other one. With a sphere as a bulkhead, the other magnet could be translated in all directions. The rotation could be controlled with the magnet axis that holds the magnet. With some research, ballpoint pens using the 0.1 mm tungsten carbide sphere are already on the market, and this could be, f.e. the tiniest joint of a cutter instrument for the robot arm.
使用带有很小的隔板,桌子或屏幕的磁铁,完全可以控制另一个磁铁,该磁铁不受直接控制。 使用球作为隔板,另一个磁体可以在所有方向上平移。 旋转可以通过固定磁铁的磁铁轴来控制。 通过一些研究,使用0.1毫米碳化钨球的圆珠笔已经在市场上出售,这可能是机器人手臂切割工具的最小接头。
Dealing with the cutter, the new model that the author is thinking has to control the grip movement. The grip should be a crab grip with one finger fixed, to minimize complexity. But there is a problem, how to control the finger if it is isolated by bulkhead? The objective is to exclude heavy and complex hardware inside the arm. In any way, it could be manipulated by the electric field to attract the finger to compress the other in front of it. An imaginary idea of the author was designed as a solid work, that the next image shows.
在处理刀具时,作者正在考虑的新模型必须控制夹具运动。 握把应为一只手指固定的蟹形握把,以最大程度地减少复杂性。 但是有一个问题,如果手指被舱壁隔离,该如何控制? 目的是排除手臂内部笨重而复杂的硬件。 无论如何,都可以通过电场来操纵它以吸引手指以挤压另一只手指。 下图显示了作者的虚构想法,并将其设计为固体作品。
Taking into account the size of the materials, not using internal DC motors or servo motors, but carrying out just the control of the support bar and electric field to be applied to the grip, this project appears to be feasible. If the size of this instrument is small enough, the author imagines that a scalpel or tweezers could be carried in parallel in just one structure. This will reduce the number of robotic arms, minimizing the complexity of the robot, it's handling and consequently lower the price.
考虑到材料的大小,不使用内部直流电动机或伺服电动机,而仅执行支撑杆的控制和要施加到夹具的电场,该项目看来是可行的。 如果该仪器的尺寸足够小,那么作者认为可以将手术刀或镊子仅在一个结构中并行放置。 这将减少机械臂的数量,最大程度地减少机器人的复杂性,操纵性并因此降低价格。
编辑意见 (Editor’s Opinion)
With all developments in the robotics field, some consequences could result.
随着机器人技术领域的所有发展,可能会导致一些后果。
With Industry 4.0 arriving, all manageable processes as, data results, controlling functionality, robot dynamics coding, sensing, and calibration, will be digitized with the cloud connection, as we do with archives and music, apps, f.e. Indeed, as years passing by, the manufacturing will tend to decrease even more. Resulting in maybe an only field Engineer watching over for any emergency problem, as supervision.
随着Industry 4.0的到来,所有可管理的流程(如数据结果,控制功能,机器人动态编码,感测和校准)都将通过云连接进行数字化,就像过去的档案和音乐,应用程序一样。 ,制造业将趋于进一步下降。 结果可能导致只有一位现场工程师会监督任何紧急情况,以作为监督。
The production line will tend to be fully automated, reducing the number of employees, increasing the specialty focused on this complex technology. Job competition will increase.
该生产线将趋于完全自动化,从而减少了员工数量,并增加了专注于这一复杂技术的专业。 工作竞争将加剧。
There are three robot’s laws (Isaac Asimov, 1942) that should be followed:
应当遵循三个机器人定律( Isaac Asimov,1942年):
A robot may not injure a human being or, through inaction, allow a human being to come to harm;
机器人不能伤害人类,也可以通过不采取行动使人类受到伤害;
A robot must obey the orders given it by human beings except where such orders would conflict with the First Law;
机器人必须服从人类的命令,除非这些命令与第一定律相抵触;
A robot must protect its own existence as long as such protection does not conflict with the First or Second Laws.
机器人必须保护自己的存在,只要这种保护与第一或第二定律不冲突。
Even though AI contributes to de machine development as intelligence, this influence may generate action volunteers by the robot. The actions could be done by the robot itself. The software and firmware need to be adapted to control machines' actions. Without due limitations, robots can bring damages, for the humans, for itself, and ever the line production. This negative side effect is an important factor to consider in the future, or the Ultron era will surge.
即使AI作为智能为机器开发做出了贡献,但这种影响可能会导致机器人产生行动志愿者。 这些动作可以由机器人本身完成。 需要对软件和固件进行调整以控制机器的动作。 在没有适当限制的情况下,机器人可以给人类,自身以及生产线带来损害。 这种负面影响是将来要考虑的重要因素,否则Ultron时代将会激增。
Even with this “smart” systems borning, a vulnerability will possibly appear. Without an effective security protocol, the hole firmware structure on the cloud, will enable for a malware intercept it and manipulate the industrial production. For everything that happens, the cybersecurity must be first well performed.
即使有了这种“智能”系统,也可能会出现漏洞。 没有有效的安全协议,云中的漏洞固件结构将使恶意软件拦截并操纵工业生产。 对于所有发生的事情,必须首先良好地执行网络安全。
These robots are a result of hard human work. Indeed before making a robot work for us as we want, we have to develop them first to the point that we are under control. Machines should help us and not hinder us.
这些机器人是人类辛勤工作的结果。 实际上,在使机器人按我们的意愿工作之前,我们必须首先开发它们,使之处于我们的控制之下。 机器应该帮助我们而不是阻碍我们。
编辑留下三个问题: (The editor leaves three questions:)
Your country is adopting any of these technologies?
贵国正在采用这些技术中的任何一种?
The digital transformation is disruptive?
数字化转型是否具有破坏性?
Would you do a robot surgery without a human nearby?
您会在没有人在附近的情况下进行机器人手术吗?
作者的建议 (Author’s Recommendations)
I Built A Surgery Robot (Youtube)
我建造了一个手术机器人( Youtube )
Rachel, Jack and Ashley Too (Black Mirror Episode Season nº5 Episode nº3)
蕾切尔(Rachel),杰克(Jack)和阿什利(Ashley Too)(《黑镜》第5季第3集)
翻译自: https://medium.com/the-innovation/lets-make-machines-work-for-us-not-us-for-them-3fe7118ba27d
服务机器人 开源