深度学习 | Pytorch深度学习实践 (Chapter 10、11 CNN)
十、CNN 卷积神经网络 基础篇
首先引入 ——
- 二维卷积:卷积层保留原空间信息
- 关键:判断输入输出的维度大小
- 特征提取:卷积层、下采样
- 分类器:全连接
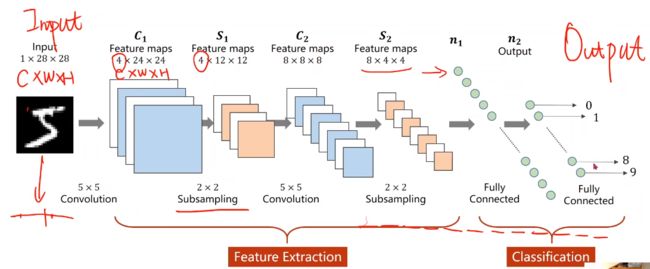
引例:RGB图像(栅格图像)
- 首先,老师介绍了CCD相机模型,这是一种通过光敏电阻,利用光强对电阻的阻值影响,对应地影响色彩亮度实现不同亮度等级像素采集的原件。三色图像是采用不同敏感度的光敏电阻实现的。
- 还介绍了矢量图像(也就是PPT里通过圆心、边、填充信息描述而来的图像,而非采集的图像)
- 红绿蓝 Channel
- 拿出一个图像块做卷积,通道高度宽度都可能会改变,将整个图像遍历,每个块分别做卷积

引例:
深度学习 | CNN卷积核与通道-CSDN博客
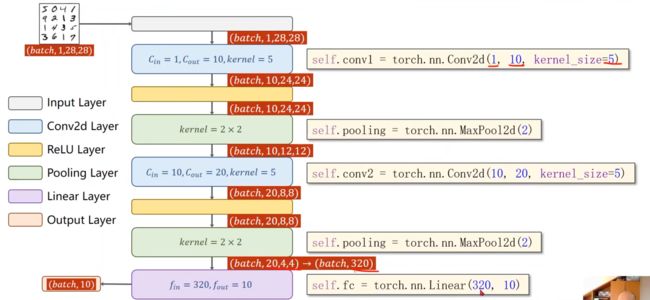
实现:A Simple Convolutional Neural Network
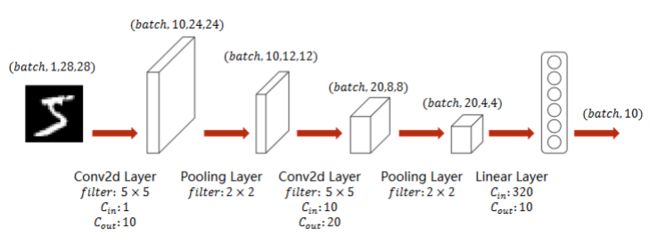
- 池化层一个就行,因为他没有权重,但是有权重的,必须每一层做一个实例
- relu 非线性激活
- 交叉熵损失 最后一层不做激活!
代码实现:
import torch
from torchvision import transforms
from torchvision import datasets
from torch.utils.data import DataLoader
import torch.nn.functional as F
import torch.optim as optim
# 1、数据准备
batch_size = 64
transform = transforms.Compose([
transforms.ToTensor(),
transforms.Normalize((0.1307,),(0.3081,))
])
train_dataset = datasets.MNIST(root='../dataset/mnist',train=True,download=True,transform=transform)
train_loader = DataLoader(train_dataset,shuffle=True,batch_size=batch_size)
test_dataset = datasets.MNIST(root='../dataset/mnist',train=False,download=True,transform=transform)
test_loader = DataLoader(test_dataset,shuffle=False,batch_size=batch_size)
# 2、构建模型
class Net(torch.nn.Module):
def __init__(self):
super(Net,self).__init__()
self.conv1 = torch.nn.Conv2d(1,10,kernel_size=5)
self.conv2 = torch.nn.Conv2d(10,20,kernel_size=5)
self.pooling = torch.nn.MaxPool2d(2)
self.fc = torch.nn.Linear(320,10)
def forward(self,x):
# Flatten data from (n,1,28,28) to (n,784)
batch_size = x.size(0)
x = self.pooling(F.relu(self.conv1(x)))
x = self.pooling(F.relu(self.conv2(x)))
x = x.view(batch_size,-1) #flatten
x = self.fc(x)
return x
model = Net()
# 3、损失函数和优化器
criterion = torch.nn.CrossEntropyLoss()
optimizer = optim.SGD(model.parameters(),lr=0.01,momentum=0.5)
# 4、训练和测试
def train(epoch):
running_loss = 0.0
for batch_idx,data in enumerate(train_loader,0):
inputs,target = data
optimizer.zero_grad()
outputs = model(inputs)
loss = criterion(outputs,target)
loss.backward()
optimizer.step()
running_loss += loss.item()
if batch_idx % 300 == 299: # 每三百次迭代输出一次
print('[%d , %5d] loss: %.3f' % (epoch + 1 ,batch_idx + 1,running_loss / 300))
running_loss = 0.0
def test():
correct = 0
total = 0
with torch.no_grad():
for data in test_loader:
images,labels = data
outputs = model(images) # 输出为一个矩阵,下面要求每一行最大值(即分类)的下标
_,predicted = torch.max(outputs.data,dim=1)
total += labels.size(0)
correct += (predicted == labels).sum().item()
print('Accuracy on test set: %d %%' % (100 * correct / total))
if __name__ == '__main__':
for epoch in range(10):
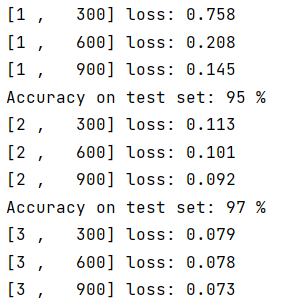
train(epoch)
test()实验结果:
十一、CNN 卷积神经网络 高级篇
基础篇中设计的模型类似于LeNet5

再来看一些更为复杂的结构:
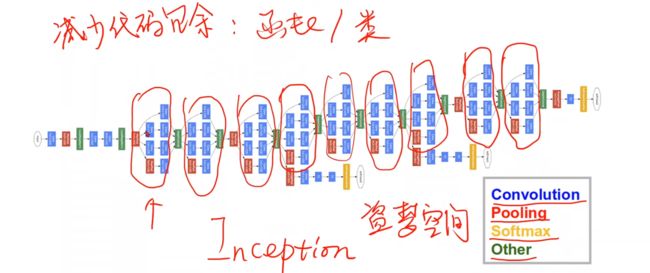
11.1、GoogLeNet
GoogLeNet是一种串行结构的复杂网络;想要实现复杂网络,并且较少代码冗余和多次重写相同功能的程序,面向过程的语言使用函数,面向对象的语言python使用类,
而在CNN当中,使用Module和block这种模块将具有复用价值的代码块封装成一块积木,供拼接使用;
GoogLeNet为自己框架里被重复使用的Module命名为Inception,这也电影盗梦空间的英文名,意为:梦中梦、嵌套;
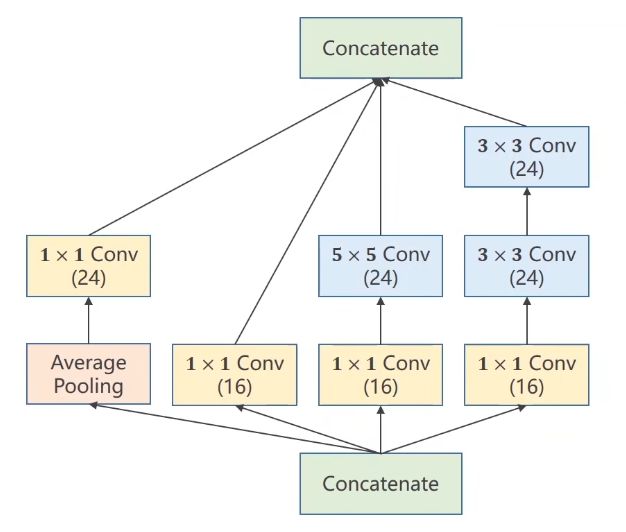
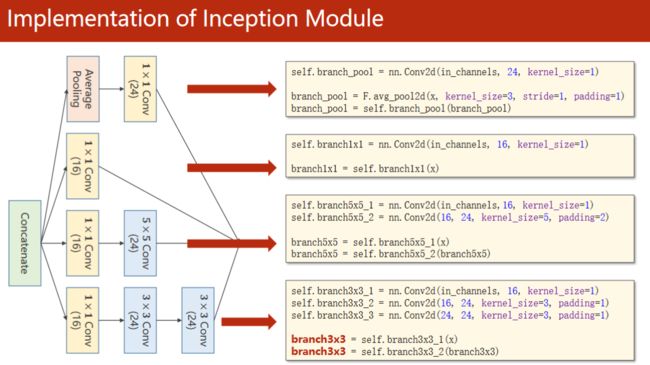
Inception Module的构造方式之一:
- 为什么要做成这个样子?
- —— 在构建神经网络时,一些超参数我们是难以确定的,比如卷积核的大小,所以你不知道哪个好用,那我就都用一下,将来通过训练,找到最优的卷积组合。
GoogLeNet的设计思路是:我把各种形式的核都写进我的Block当中,至于每一个支路的权重,让网络训练的时候自己去搭配;
- Concatenate:将四条通道算出来的张量拼接到一起
GoogLeNet设计了四条通路支线,并要求他们保证图像的宽和高W、H必须相同,只有通道数C可以不相同,因为各支线进行过卷积和池化等操作后,要将W和H构成的面为粘合面,按照C的方向,拼接concatenate起来;- Average Pooling:均值池化
- 1x1的卷积可以将信息融合:也叫network in network(网络里的网络)
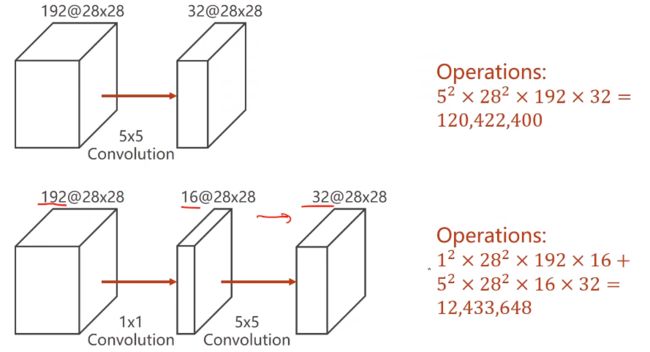
1 * 1的卷积核:以往我只是表面上觉得,单位像素大小的卷积核,他的意义不过是调整输入和输出的通道数之间的关系;刘老师举了个例子,让我对这个卷积核有了新的认识:- 就是加速运算,他的作用的确是加速运算,不过其中的原理是:通过
1*1的核处理过的图像,可以减少后续卷积层的输入通道数;
Inception块 代码实现:
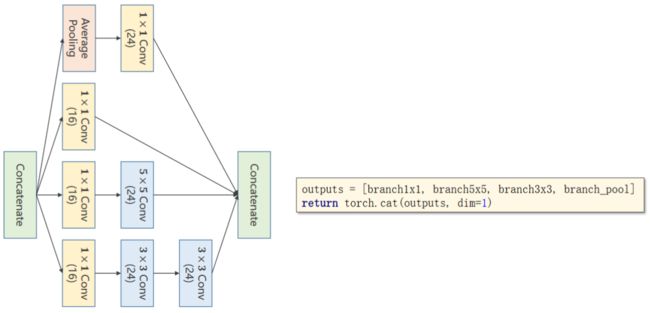
然后再沿着通道将他们拼接在一起:
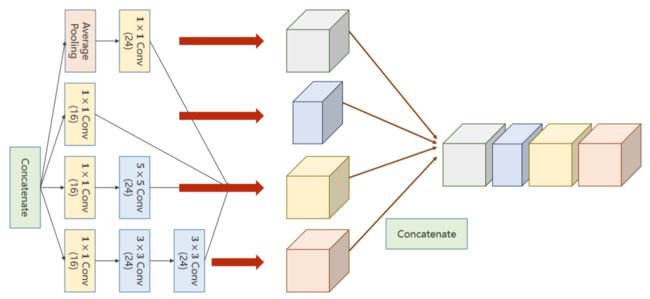
将四个分支可以放到一个列表里,然后用torch提供的函数cat沿着dim=1的维度将他们拼接起来
因为我们的维度是 batch,channel,width,height ,所以是第一个维度dim=1,索引从零开始,C的位置是1
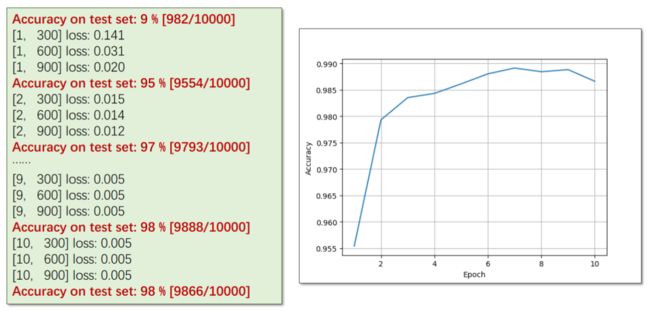
MNIST数据集 代码实现:
初始的输入通道并没有写死,而是作为构造函数里的参数,这是因为我们将来实例化时可以指明输入通道是多少。
先是1个卷积层(conv,maxpooling,relu),然后inceptionA模块(输出的channels是24+16+24+24=88),接下来又是一个卷积层(conv,mp,relu),然后inceptionA模块,最后一个全连接层(fc)。
1408这个数据可以通过x = x.view(in_size, -1)后调用x.shape得到。
也可通过查看网络结构:
最后一层线性层的输入尺寸(input size)1408是根据倒数第二个InceptionA模块的输出形状推导出来的。在该模块中,输入形状为[-1, 88, 4, 4],其中-1表示批量大小(Batch Size)。因此,通过展平这个特征图(Flatten),我们可以将其转换为一维向量,即 [-1, 88 * 4 * 4] = [-1, 1408]。
所以,线性层的输入尺寸为1408,它接收展平后的特征向量作为输入,并将其映射到10个输出类别的向量。
import torch
from torchvision import transforms
from torchvision import datasets
from torch.utils.data import DataLoader
import torch.nn.functional as F
import torch.optim as optim
from torchvision import models
from torchsummary import summary
# 1、数据准备
batch_size = 64
transform = transforms.Compose([
transforms.ToTensor(),
transforms.Normalize((0.1307,),(0.3081,))
])
train_dataset = datasets.MNIST(root='../dataset/mnist',train=True,download=True,transform=transform)
train_loader = DataLoader(train_dataset,shuffle=True,batch_size=batch_size)
test_dataset = datasets.MNIST(root='../dataset/mnist',train=False,download=True,transform=transform)
test_loader = DataLoader(test_dataset,shuffle=False,batch_size=batch_size)
# 2、构建模型
class InceptionA(torch.nn.Module):
def __init__(self,in_channels):
super(InceptionA,self).__init__()
self.branch1x1 = torch.nn.Conv2d(in_channels,16,kernel_size=1)
self.branch5x5_1 = torch.nn.Conv2d(in_channels,16,kernel_size=1)
self.branch5x5_2 = torch.nn.Conv2d(16, 24, kernel_size=5,padding=2)
self.branch3x3_1 = torch.nn.Conv2d(in_channels,16,kernel_size=1)
self.branch3x3_2 = torch.nn.Conv2d(16, 24,kernel_size=3,padding=1)
self.branch3x3_3 = torch.nn.Conv2d(24, 24, kernel_size=3, padding=1)
self.branch_pool = torch.nn.Conv2d(in_channels,24,kernel_size=1)
def forward(self,x):
branch1x1 = self.branch1x1(x)
branch5x5 = self.branch5x5_1(x)
branch5x5 = self.branch5x5_2(branch5x5)
branch3x3 = self.branch3x3_1(x)
branch3x3 = self.branch3x3_2(branch3x3)
branch3x3 = self.branch3x3_3(branch3x3)
branch_pool = F.avg_pool2d(x,kernel_size=3,stride=1,padding=1)
branch_pool = self.branch_pool(branch_pool)
outputs = [branch1x1,branch5x5,branch3x3,branch_pool]
return torch.cat(outputs,dim=1)
class Net(torch.nn.Module):
def __init__(self):
super(Net,self).__init__()
self.conv1 = torch.nn.Conv2d(1,10,kernel_size=5)
self.conv2 = torch.nn.Conv2d(88,20,kernel_size=5)
self.incep1 = InceptionA(in_channels=10)
self.incep2 = InceptionA(in_channels=20)
self.mp = torch.nn.MaxPool2d(2)
self.fc = torch.nn.Linear(1408,10)
def forward(self,x):
in_size = x.size(0)
x = F.relu(self.mp(self.conv1(x)))
x = self.incep1(x)
x = F.relu(self.mp(self.conv2(x)))
x = self.incep2(x)
x = x.view(in_size,-1)
x = self.fc(x)
return x
model = Net()
#summary(model,(1,28,28),device='cpu')
# 3、损失函数和优化器
criterion = torch.nn.CrossEntropyLoss()
optimizer = optim.SGD(model.parameters(),lr=0.01,momentum=0.5)
# 4、训练和测试
def train(epoch):
running_loss = 0.0
for batch_idx,data in enumerate(train_loader,0):
inputs,target = data
optimizer.zero_grad()
outputs = model(inputs)
loss = criterion(outputs,target)
loss.backward()
optimizer.step()
running_loss += loss.item()
if batch_idx % 300 == 299: # 每三百次迭代输出一次
print('[%d , %5d] loss: %.3f' % (epoch + 1 ,batch_idx + 1,running_loss / 300))
running_loss = 0.0
def test():
correct = 0
total = 0
with torch.no_grad():
for data in test_loader:
images,labels = data
outputs = model(images) # 输出为一个矩阵,下面要求每一行最大值(即分类)的下标
_,predicted = torch.max(outputs.data,dim=1)
total += labels.size(0)
correct += (predicted == labels).sum().item()
print('Accuracy on test set: %d %%' % (100 * correct / total))
if __name__ == '__main__':
for epoch in range(10):
train(epoch)
test() Layer (type) Output Shape Param #
================================================================
Conv2d-1 [-1, 10, 24, 24] 260
MaxPool2d-2 [-1, 10, 12, 12] 0
Conv2d-3 [-1, 16, 12, 12] 176
Conv2d-4 [-1, 16, 12, 12] 176
Conv2d-5 [-1, 24, 12, 12] 9,624
Conv2d-6 [-1, 16, 12, 12] 176
Conv2d-7 [-1, 24, 12, 12] 3,480
Conv2d-8 [-1, 24, 12, 12] 5,208
Conv2d-9 [-1, 24, 12, 12] 264
InceptionA-10 [-1, 88, 12, 12] 0
Conv2d-11 [-1, 20, 8, 8] 44,020
MaxPool2d-12 [-1, 20, 4, 4] 0
Conv2d-13 [-1, 16, 4, 4] 336
Conv2d-14 [-1, 16, 4, 4] 336
Conv2d-15 [-1, 24, 4, 4] 9,624
Conv2d-16 [-1, 16, 4, 4] 336
Conv2d-17 [-1, 24, 4, 4] 3,480
Conv2d-18 [-1, 24, 4, 4] 5,208
Conv2d-19 [-1, 24, 4, 4] 504
InceptionA-20 [-1, 88, 4, 4] 0
Linear-21 [-1, 10] 14,090
11.2、ResNet
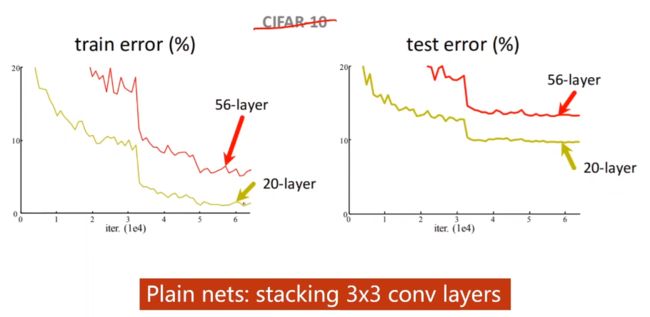
GoogLeNet最后留下了一个问题:通过测试,网络的层数会影响模型的精度,但当时没有意识到梯度消失的问题,
所以GoogLeNet认为We Need To Go Deeper;
直到何凯明大神的ResNet的出现,提出了层数越多,模型效果不一定越好的问题,
并针对这个问题提出了解决方案ResNet网络结构。
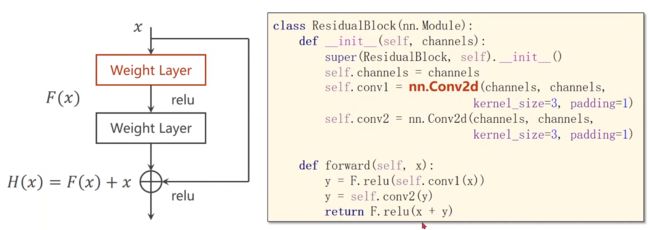
Residual Net提出了这样一种块:跳连接
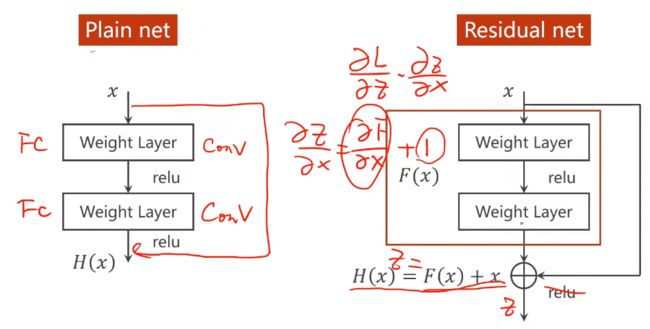
以往的网络模型是这种Plain Net形式:
输入数据x,经过Weight Layer(可以是卷积层,也可以是池化或者线性层),再通过激活函数加入非线性影响因素,最后输出结果H(x);
这种方式使得H(x)对x的偏导数的值分布在(0,1)之间,这在反向传播、复合函数的偏导数逐步累乘的过程中,必然会导致损失函数L对x的偏导数的值,趋近于0,而且,网络层数越深,这种现象就会越明显,最终导致最开始的(也就是靠近输入的)层没有获得有效的权重更新,甚至模型失效;
即梯度消失:假如每一处的梯度都小于1,由于我们使用的是反向传播,当梯度趋近于0时,那么权重得不到更新:![]() ,也就是说离输入近的块没办法得到充分的训练。
,也就是说离输入近的块没办法得到充分的训练。
解决方法:逐层训练,但层数过多会很难
ResNet采用了一个非常巧妙的方式解决了H(x)对x的偏导数的值分布在(0,1)之间这个问题:
在以往的框架中,加入一个跳跃,再原有的网络输出F(x)的基础上,将输入x累加到上面,这样一来,在最终输出H(x)对输入数据x求偏导数的时候,这个结果就会分布在(1,2)之间,这样就不怕网络在更新权重梯度累乘的过程中,出现乘积越来越趋于0而导致的梯度消失问题;
与GoogLeNet类似,ResNet的Residual Block在搭建时,留了一个传入参数的机会,这个参数留给了通道数channel,Residual Block的要求是输入与输出的C,W,H分别对应相同,B是一定要相同的,所以就是说,经过残差模块Residual Block处理过的图像,并不改变原有的尺寸和通道数;(TBD)
但是注意,因为要和x做加法,所以图中的两层输出和输入x 张量维度必须完全一样,即通道高度宽度都要一样
若输出和输入的维度不一样,也可以做跳连接,可以将x过一个最大池化层转换成同样的大小,如下图
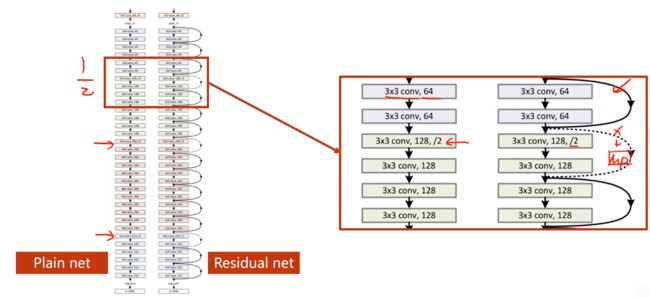
利用残差结构块的网络:
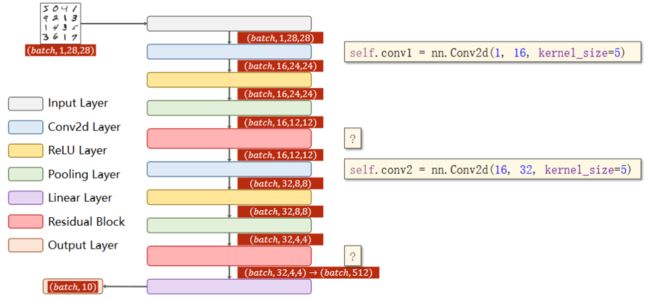
先来看一下residual block的代码实现:
为了保持输入输出的大小不变,所以要将padding设置为1,输入通道和输出通道都和x保持一致
注意第二个卷积之后,先做求和再激活
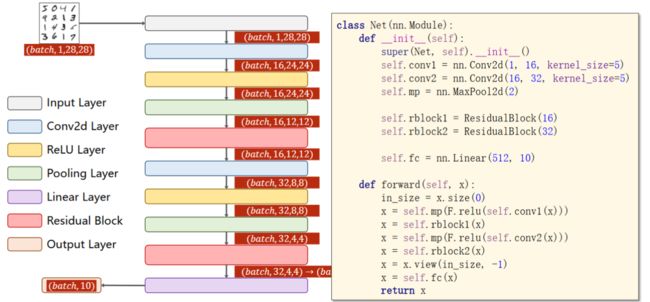
MNIST数据集 代码实现:
import torch
from torchvision import transforms
from torchvision import datasets
from torch.utils.data import DataLoader
import torch.nn.functional as F
import torch.optim as optim
from torchvision import models
from torchsummary import summary
from torchviz import make_dot
# 1、数据准备
batch_size = 64
transform = transforms.Compose([
transforms.ToTensor(),
transforms.Normalize((0.1307,),(0.3081,))
])
train_dataset = datasets.MNIST(root='../dataset/mnist',train=True,download=True,transform=transform)
train_loader = DataLoader(train_dataset,shuffle=True,batch_size=batch_size)
test_dataset = datasets.MNIST(root='../dataset/mnist',train=False,download=True,transform=transform)
test_loader = DataLoader(test_dataset,shuffle=False,batch_size=batch_size)
# 2、构建模型
class InceptionA(torch.nn.Module):
def __init__(self,in_channels):
super(InceptionA,self).__init__()
self.branch1x1 = torch.nn.Conv2d(in_channels,16,kernel_size=1)
self.branch5x5_1 = torch.nn.Conv2d(in_channels,16,kernel_size=1)
self.branch5x5_2 = torch.nn.Conv2d(16, 24, kernel_size=5,padding=2)
self.branch3x3_1 = torch.nn.Conv2d(in_channels,16,kernel_size=1)
self.branch3x3_2 = torch.nn.Conv2d(16, 24,kernel_size=3,padding=1)
self.branch3x3_3 = torch.nn.Conv2d(24, 24, kernel_size=3, padding=1)
self.branch_pool = torch.nn.Conv2d(in_channels,24,kernel_size=1)
def forward(self,x):
branch1x1 = self.branch1x1(x)
branch5x5 = self.branch5x5_1(x)
branch5x5 = self.branch5x5_2(branch5x5)
branch3x3 = self.branch3x3_1(x)
branch3x3 = self.branch3x3_2(branch3x3)
branch3x3 = self.branch3x3_3(branch3x3)
branch_pool = F.avg_pool2d(x,kernel_size=3,stride=1,padding=1)
branch_pool = self.branch_pool(branch_pool)
outputs = [branch1x1,branch5x5,branch3x3,branch_pool]
return torch.cat(outputs,dim=1)
class ResidualBlock(torch.nn.Module):
def __init__(self,channels):
super(ResidualBlock,self).__init__()
self.channels = channels
self.conv1 = torch.nn.Conv2d(channels,channels,kernel_size=3,padding=1)
self.conv2 = torch.nn.Conv2d(channels, channels, kernel_size=3, padding=1)
def forward(self,x):
y = F.relu(self.conv1(x))
y = self.conv2(y)
return F.relu(x+y)
class Net(torch.nn.Module):
def __init__(self):
super(Net,self).__init__()
self.conv1 = torch.nn.Conv2d(1,16,kernel_size=5)
self.conv2 = torch.nn.Conv2d(16,32,kernel_size=5)
self.rblock1 = ResidualBlock(16)
self.rblock2 = ResidualBlock(32)
self.mp = torch.nn.MaxPool2d(2)
self.fc = torch.nn.Linear(512,10)
def forward(self,x):
in_size = x.size(0)
x = self.mp(F.relu(self.conv1(x)))
x = self.rblock1(x)
x = self.mp(F.relu(self.conv2(x)))
x = self.rblock2(x)
x = x.view(in_size,-1)
x = self.fc(x)
return x
model = Net()
#x = torch.randn(1,1,28,28)
#y = model(x)
#vise=make_dot(y, params=dict(model.named_parameters()))
#vise.view()
#print(model)
#summary(model,(1,28,28),device='cpu')
# 3、损失函数和优化器
criterion = torch.nn.CrossEntropyLoss()
optimizer = optim.SGD(model.parameters(),lr=0.01,momentum=0.5)
# 4、训练和测试
def train(epoch):
running_loss = 0.0
for batch_idx,data in enumerate(train_loader,0):
inputs,target = data
optimizer.zero_grad()
outputs = model(inputs)
loss = criterion(outputs,target)
loss.backward()
optimizer.step()
running_loss += loss.item()
if batch_idx % 300 == 299: # 每三百次迭代输出一次
print('[%d , %5d] loss: %.3f' % (epoch + 1 ,batch_idx + 1,running_loss / 300))
running_loss = 0.0
def test():
correct = 0
total = 0
with torch.no_grad():
for data in test_loader:
images,labels = data
outputs = model(images) # 输出为一个矩阵,下面要求每一行最大值(即分类)的下标
_,predicted = torch.max(outputs.data,dim=1)
total += labels.size(0)
correct += (predicted == labels).sum().item()
print('Accuracy on test set: %d %%' % (100 * correct / total))
if __name__ == '__main__':
for epoch in range(10):
train(epoch)
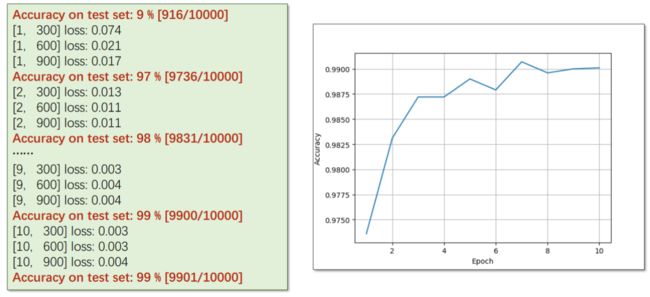
test()实验结果:
课程最后刘老师推荐了两篇论文:
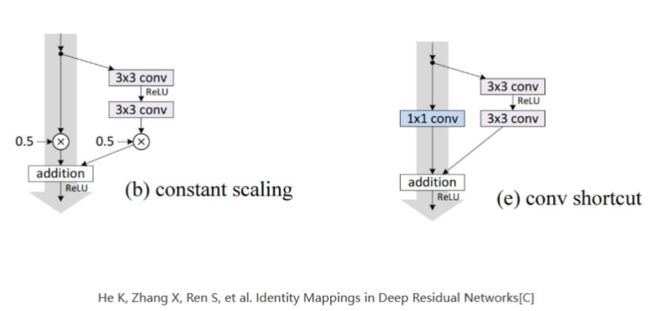
Identity Mappings in Deep Residual Networks:
He K, Zhang X, Ren S, et al. Identity Mappings in Deep Residual Networks[C]
其中给出了很多不同种类的Residual Block变化的构造形式;
Densely Connected Convolutional Networks:
Huang G, Liu Z, Laurens V D M, et al. Densely Connected Convolutional Networks[J]. 2016:2261-2269.
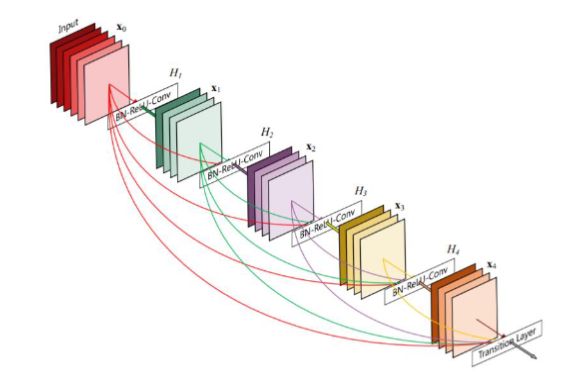
大名鼎鼎的DenseNet,这个网络结构基于ResNet跳跃传递的思想,实现了多次跳跃的网络结构,以后很多通过神经网络提取多尺度、多层级的特征,都在利用这种方式,通过Encoder对不同层级的语义特征进行逐步提取,在穿插着传递到Decoder过程中不同的层级上去,旨在融合不同层级的特征,尽可能地挖掘图像全部的特征;
学习方法
全文资料及部分文字来源于 ——
【Pytorch深度学习实践】B站up刘二大人之BasicCNN & Advanced CNN -代码理解与实现(9/9)_b站讲神经网络的up土堆-CSDN博客
11.卷积神经网络(高级篇)_哔哩哔哩_bilibili