视频去噪网络BSVD的实现
前些天写了视频去噪网络BSVD论文的理解,详情请点击这里,这两个星期动手实践了一下,本篇就来记录一下这个模型的实现。
这个网络的独特之处在于,它的训练和推理在实现上有所差别。在训练阶段,其使用了TSM(Time Shift Module)结构,而在推理时则使用了BBB(Bidirectional Buffer Block)结构。训练时,网络是一个MIMO(多输入多输出)形式,而在推理时,则将其设计成了单输入、单输出的流式形式。推理时,由于网络中存在16个双向buffer,即BBB,因此,前16帧会输出空数据,16帧之后开始正常输出去噪视频帧,到视频序列结束后,还会继续输出16帧的去噪视频帧,也就是,流式推理整体存在16帧的延迟。这在一些对实时性要求不太高的应用中可以推广,但对于实时性要求严格,并且存储资源有限的应用中,就无法有效应用了。
下面,我们就通过对官方代码的理解,来聊一聊BSVD的实现。
官方代码地址:GitHub - ChenyangQiQi/BSVD: [ACM MM 2022] Real-time Streaming Video Denoising with Bidirectional Buffers
BSVD网络采用了两个UNet级联的方式。
1. 训练阶段的网络实现
在训练阶段,网络的实现如下:
class WNet(nn.Module):
def __init__(self, chns=[32, 64, 128], mid_ch=3, shift_input=False, stage_num=2, in_ch=4, out_ch=3, norm='bn', act='relu', interm_ch=30, blind=False):
# def __init__(self, chns=[32, 64, 128], mid_ch=3, shift_input=False, stage_num=2, in_ch=4, out_ch=3, norm='bn', act='relu', blind=False):
super(WNet, self).__init__()
self.stage_num = stage_num
self.nets_list = nn.ModuleList()
for i in np.arange(stage_num):
if i == 0:
stage_in_ch = in_ch
else:
stage_in_ch = mid_ch
if i == (stage_num-1):
stage_out_ch = out_ch
else:
stage_out_ch = mid_ch
# self.nets_list.append(DenBlock(chns=chns, out_ch=stage_out_ch, in_ch=stage_in_ch, shift_input=shift_input, norm=norm, act=act, interm_ch=interm_ch))
if i == 0:
self.nets_list.append(DenBlock(chns=chns, out_ch=stage_out_ch, in_ch=stage_in_ch, shift_input=shift_input, norm=norm, act=act, blind=blind, interm_ch=interm_ch))
else:
self.nets_list.append(DenBlock(chns=chns, out_ch=stage_out_ch,
in_ch=stage_in_ch, shift_input=shift_input, norm=norm, act=act, interm_ch=interm_ch))
# self.temp2 = DenBlock(chns=chns, in_ch=mid_ch, shift_input=shift_input)
# Init weights
self.reset_params()
@staticmethod
def weight_init(m):
if isinstance(m, nn.Conv2d):
nn.init.kaiming_normal_(m.weight, nonlinearity='relu')
def reset_params(self):
for _, m in enumerate(self.modules()):
self.weight_init(m)
def forward(self, x, debug=False):
# if debug: x_in = x
# x = self.temp1(x)
for i in np.arange(self.stage_num):
if debug: x_temp1 = x
x = self.nets_list[i](x)
# if debug: x_temp2 = x
return x
网络由两个DenBlock组成,每个DenBlock是一个UNet结构:
class DenBlock(nn.Module):
""" Definition of the denosing block of FastDVDnet.
Inputs of constructor:
num_input_frames: int. number of input frames
Inputs of forward():
xn: input frames of dim [N, C, H, W], (C=3 RGB)
noise_map: array with noise map of dim [N, 1, H, W]
"""
def __init__(self, chns=[32, 64, 128], out_ch=3, in_ch=4, shift_input=False, norm='bn', bias=True, act='relu', interm_ch=30, blind=False):
# def __init__(self, chns=[32, 64, 128], out_ch=3, in_ch=4, shift_input=False, norm='bn', bias=True, act='relu', blind=False):
super(DenBlock, self).__init__()
self.chs_lyr0, self.chs_lyr1, self.chs_lyr2 = chns
# if stage2: in_ch=3
if shift_input:
self.inc = CvBlock(in_ch=in_ch, out_ch=self.chs_lyr0, norm=norm, bias=bias, act=act)
else:
self.inc = InputCvBlock(
num_in_frames=1, out_ch=self.chs_lyr0, in_ch=in_ch, norm=norm, bias=bias, act=act, interm_ch=interm_ch, blind=blind)
# num_in_frames=1, out_ch=self.chs_lyr0, in_ch=in_ch, norm=norm, bias=bias, act=act, blind=blind)
self.downc0 = DownBlock(in_ch=self.chs_lyr0, out_ch=self.chs_lyr1, norm=norm, bias=bias, act=act)
self.downc1 = DownBlock(in_ch=self.chs_lyr1, out_ch=self.chs_lyr2, norm=norm, bias=bias, act=act)
self.upc2 = UpBlock(in_ch=self.chs_lyr2, out_ch=self.chs_lyr1, norm=norm, bias=bias, act=act)
self.upc1 = UpBlock(in_ch=self.chs_lyr1, out_ch=self.chs_lyr0, norm=norm, bias=bias, act=act)
self.outc = OutputCvBlock(in_ch=self.chs_lyr0, out_ch=out_ch, norm=norm, bias=bias, act=act)
self.reset_params()
@staticmethod
def weight_init(m):
if isinstance(m, nn.Conv2d):
nn.init.kaiming_normal_(m.weight, nonlinearity='relu')
def reset_params(self):
for _, m in enumerate(self.modules()):
self.weight_init(m)
def forward(self, in1):
'''Args:
inX: Tensor, [N, C, H, W] in the [0., 1.] range
noise_map: Tensor [N, 1, H, W] in the [0., 1.] range
'''
# Input convolution block
x0 = self.inc(in1)
# Downsampling
x1 = self.downc0(x0)
x2 = self.downc1(x1)
# Upsampling
x2 = self.upc2(x2)
x1 = self.upc1(x1+x2)
# Estimation
x = self.outc(x0+x1)
# Residual
x[:, :3, :, :] = in1[:, :3, :, :] - x[:, :3, :, :]
return x
这段代码与论文中的UNet结构相对应(见下图),包含一个输入层,两个下采样层,两个上采样层,一个输出层。
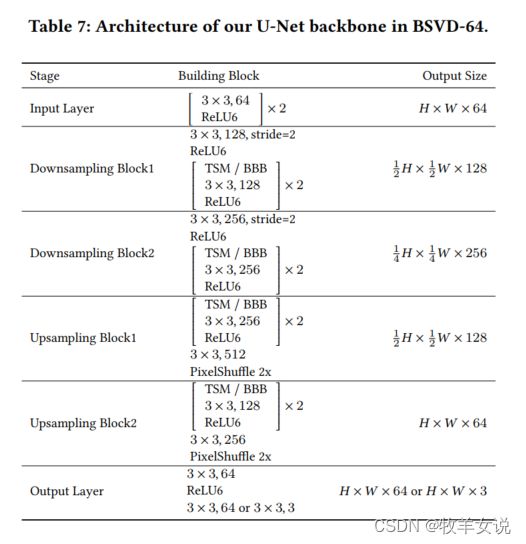
输入层没什么特别可说的,主要是两个Conv2d=>BN=>ReLU的组合;输出层也是常规实现,Con2d=>BN=>ReLU=>Con2d,需要注意的是,作者在实现过程中,BN层是没有使用的,是透传通过。
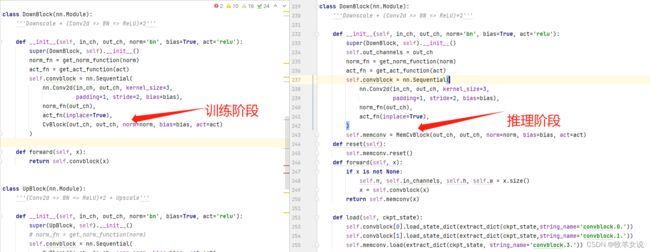
需要花心思理解的是下采样层和上采样层的实现,因为这两个模块在训练和推理过程中,是有所不同的。
两个模块的初始实现很简单,定义如下:
class DownBlock(nn.Module):
'''Downscale + (Conv2d => BN => ReLU)*2'''
def __init__(self, in_ch, out_ch, norm='bn', bias=True, act='relu'):
super(DownBlock, self).__init__()
norm_fn = get_norm_function(norm)
act_fn = get_act_function(act)
self.convblock = nn.Sequential(
nn.Conv2d(in_ch, out_ch, kernel_size=3,
padding=1, stride=2, bias=bias),
norm_fn(out_ch),
act_fn(inplace=True),
CvBlock(out_ch, out_ch, norm=norm, bias=bias, act=act)
)
def forward(self, x):
return self.convblock(x)
class UpBlock(nn.Module):
'''(Conv2d => BN => ReLU)*2 + Upscale'''
def __init__(self, in_ch, out_ch, norm='bn', bias=True, act='relu'):
super(UpBlock, self).__init__()
# norm_fn = get_norm_function(norm)
self.convblock = nn.Sequential(
CvBlock(in_ch, in_ch, norm=norm, bias=bias, act=act),
nn.Conv2d(in_ch, out_ch*4, kernel_size=3, padding=1, bias=bias),
nn.PixelShuffle(2)
)
return self.convblock(x)关键在于两者共同调用的子模块CvBlock的实现,在定义时,CvBlock被常规定义为:
class CvBlock(nn.Module):
'''(Conv2d => BN => ReLU) x 2'''
def __init__(self, in_ch, out_ch, norm='bn', bias=True, act='relu'):
super(CvBlock, self).__init__()
norm_fn = get_norm_function(norm)
act_fn = get_act_function(act)
self.c1 = nn.Conv2d(in_ch, out_ch, kernel_size=3,
padding=1, bias=bias)
self.b1 = norm_fn(out_ch)
self.relu1 = act_fn(inplace=True)
self.c2 = nn.Conv2d(out_ch, out_ch, kernel_size=3,
padding=1, bias=bias)
self.b2 = norm_fn(out_ch)
self.relu2 = act_fn(inplace=True)
def forward(self, x):
x = self.c1(x)
x = self.b1(x)
x = self.relu1(x)
x = self.c2(x)
x = self.b2(x)
x = self.relu2(x)
return x但接下来,上述定义中的c1和c2则被替换成了TSM实现: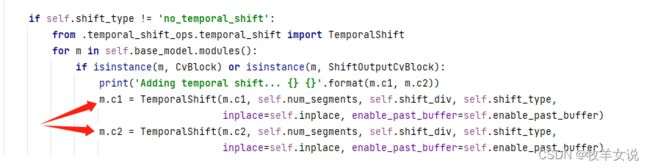
其中,shift模块的核心实现代码如下,对输入的channels分别向左和向右移动了一定单位(fold)。
def shift(x, n_segment, shift_type, fold_div=3, stride=1, inplace=False):
nt, c, h, w = x.size()
n_batch = nt // n_segment
x = x.view(n_batch, n_segment, c, h, w)
fold = c // fold_div # 32/8 = 4
if inplace:
# Due to some out of order error when performing parallel computing.
# May need to write a CUDA kernel.
print("WARNING: use inplace shift. it has bugs")
raise NotImplementedError
else:
out = torch.zeros_like(x)
if not 'toFutureOnly' in shift_type:
out[:, :-stride, :fold] = x[:, stride:, :fold] # backward (left shift)
out[:, stride:, fold: 2 * fold] = x[:, :-stride, fold: 2 * fold] # forward (right shift)
else:
out[:, stride:, : 2 * fold] = x[:, :-stride, : 2 * fold] # right shift only
out[:, :, 2 * fold:] = x[:, :, 2 * fold:] # not shift
return out.view(nt, c, h, w)
2. 推理阶段的网络实现
在推理阶段,网络实现就显得复杂一些了。大致的网络结构没变,但由于内部的TSM替换成了BBB, 因此没办法严格进行整体网络的加载,只能每一层单独加载训练出来的state_dict。并且,网络推理变成了流式推理,整个网络的定义显得比较凌乱,结构如下:
class BSVD(nn.Module):
"""
Bidirection-buffer based framework with pipeline-style inference
"""
def __init__(self, chns=[32, 64, 128], mid_ch=3, shift_input=False, in_ch=4, out_ch=3, norm='bn', act='relu', interm_ch=30, blind=False,
pretrain_ckpt='./experiments/pretrained_ckpt/bsvd-64.pth'):
super(BSVD, self).__init__()
self.temp1 = DenBlock(chns=chns, out_ch=mid_ch, in_ch=in_ch, shift_input=shift_input, norm=norm, act=act, blind=blind, interm_ch=interm_ch)
self.temp2 = DenBlock(chns=chns, out_ch=out_ch, in_ch=mid_ch, shift_input=shift_input, norm=norm, act=act, blind=blind, interm_ch=interm_ch)
self.shift_num = self.count_shift()
# Init weights
self.reset_params()
if pretrain_ckpt is not None:
self.load(pretrain_ckpt)
def reset(self):
self.temp1.reset()
self.temp2.reset()
def load(self, path):
ckpt = torch.load(path)
print("load from %s"%path)
ckpt_state = ckpt['params']
# split the dict here
if 'module' in list(ckpt_state.keys())[0]:
base_name = 'module.base_model.'
else:
base_name = 'base_model.'
ckpt_state_1 = extract_dict(ckpt_state, string_name=base_name+'nets_list.0.')
ckpt_state_2 = extract_dict(ckpt_state, string_name=base_name+'nets_list.1.')
self.temp1.load_from(ckpt_state_1)
self.temp2.load_from(ckpt_state_2)
@staticmethod
def weight_init(m):
if isinstance(m, nn.Conv2d):
nn.init.kaiming_normal_(m.weight, nonlinearity='relu')
def reset_params(self):
for _, m in enumerate(self.modules()):
self.weight_init(m)
def feedin_one_element(self, x):
x = self.temp1(x)
x = self.temp2(x)
return x
def forward(self, input, noise_map=None):
# N, F, C, H, W -> (N*F, C, H, W)
if noise_map != None:
input = torch.cat([input, noise_map], dim=2)
N, F, C, H, W = input.shape
input = input.reshape(N*F, C, H, W)
base_out = self.streaming_forward(input)
NF, C, H, W = base_out.shape
base_out = base_out.reshape(N, F, C, H, W)
return base_out
def streaming_forward(self, input_seq):
"""
pipeline-style inference
Args:
Noisy video stream
Returns:
Denoised video stream
"""
out_seq = []
if isinstance(input_seq, torch.Tensor):
n,c,h,w = input_seq.shape
input_seq = [input_seq[i:i+1, ...] for i in np.arange(n)]
assert type(input_seq) == list, "convert the input into a sequence"
_,c,h,w = input_seq[0].shape
with torch.no_grad():
for i, x in enumerate(input_seq):
x_cuda = x.cuda()
x_cuda = self.feedin_one_element(x_cuda)
# if x_cuda is not None: x_cuda = x_cuda.cpu()
if isinstance(x_cuda, torch.Tensor):
out_seq.append(x_cuda)
else:
out_seq.append(x_cuda)
end_out = self.feedin_one_element(None)
out_seq.append(end_out)
# end stage
while 1:
end_out = self.feedin_one_element(None)
if len(out_seq) == (self.shift_num+len(input_seq)):
break
out_seq.append(end_out)
# number of temporal shift is 2, last element is 0
# TODO fix init and end frames
out_seq_clip = out_seq[self.shift_num:]
self.reset()
return torch.cat(out_seq_clip, dim=0)
def count_shift(self):
count = 0
for name, module in self.named_modules():
# print(type(module))
if "BiBufferConv" in str(type(module)):
count+=1
return count两个UNet的定义(DenBlock)大体上没发生变化,但下采样模块和上采样模块的定义发生了改变。
下采样层如下,原来带有TSM的CvBlock换成了MemCvBlock:
上采样模块也类似:
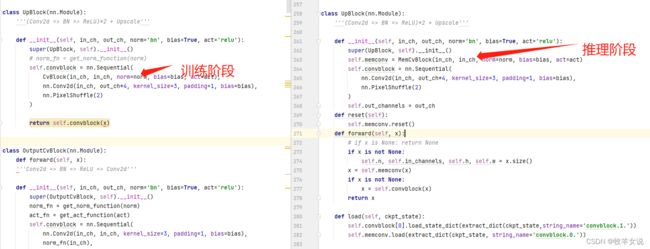
而MemCvBlock则调用了BBB模块,BBB模块的实现如下,这是整个算法的核心:
class BiBufferConv(nn.Module):
def __init__(self,
in_channels,
out_channels,
kernel_size,
stride=1,
padding=0,
bias=True
) -> None:
super(BiBufferConv, self).__init__()
self.op = ShiftConv(
in_channels,
out_channels,
kernel_size,
stride,
padding,
bias
)
self.out_channels = out_channels
self.left_fold_2fold = None
# self.zero_tensor = None
self.center = None
def reset(self):
self.left_fold_2fold = None
self.center = None
def forward(self, input_right, verbose=False):
fold_div = 8
if input_right is not None:
self.n, self.c, self.h, self.w = input_right.size()
self.fold = self.c//fold_div
# Case1: In the start or end stage, the memory is empty
if self.center is None:
self.center = input_right
# if verbose:
if input_right is not None:
if self.left_fold_2fold is None:
# In the start stage, the memory and left tensor is empty
self.left_fold_2fold = torch.zeros((self.n, self.fold, self.h, self.w), device=torch.device('cuda'))
if verbose: print("%f+none+%f = none"%(torch.mean(self.left_fold_2fold), torch.mean(input_right)))
else:
# in the end stage, both feed in and memory are empty
if verbose: print("%f+none+none = none"%(torch.mean(self.left_fold_2fold)))
# print("self.center is None")
return None
# Case2: Center is not None, but input_right is None
elif input_right is None:
# In the last procesing stage, center is 0
output = self.op(self.left_fold_2fold, self.center, torch.zeros((self.n, self.fold, self.h, self.w), device=torch.device('cuda')))
if verbose: print("%f+%f+none = %f"%(torch.mean(self.left_fold_2fold), torch.mean(self.center), torch.mean(output)))
else:
output = self.op(self.left_fold_2fold, self.center, input_right)
if verbose: print("%f+%f+%f = %f"%(torch.mean(self.left_fold_2fold), torch.mean(self.center), torch.mean(input_right), torch.mean(output)))
# if output == 57:
# a = 1
self.left_fold_2fold = self.center[:, self.fold:2*self.fold, :, :]
self.center = input_right
return output这样,通过BBB模块,就实现了16个双向Buffer的填充、更新和清空。
限于篇幅,先梳理出个大体的思路,实际上还有很多细节需要特别关注,留待下一篇来写吧。