Linux阻塞IO(高级字符设备二)
阻塞IO属于同步 IO,阻塞IO在Linux内核中是非常常用的 IO 模型,所依赖的机制是等待队列。
一、等待队列介绍
在 Linux 驱动程序中,阻塞进程可以使用等待队列来实现。等待队列是内核实现阻塞和唤醒的内核机制,以双循环链表为基础结构,由链表头和链表项两部分组成,分别表示等待队列头和等待队列元素
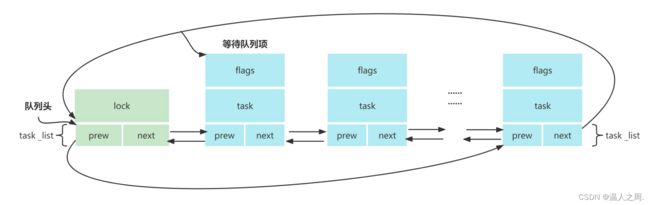
等待队列头使用结构体 wait_queue_head_t 来表示,等待队列头是一个等待队列的头部,这个结构体定义在文件 include/linux/wait.h 里面,结构体内容如下所示:
struct _wait_queue_head
{
spinlock_t lock; //自旋锁
struct list_head task_list //链表头
};
typefef struct _wait_queue_head wait_queue_head_t;
等待队列项使用结构体 wait_queue_t 来表示,等待队列项是等待队列元素,该结构体同样定义在文件 include/linux/wait.h 里面,结构体内容如下所示:
struct _wait_queue
{
unsigned int flags;
void *private;
wait_queue_func_t func;
struct list_head task_list;
};
typedef struct _wait_queue wait_queue_t;
二、等待队列 API
2.1、定义并初始化等待队列头
等待队列要想被使用,第一步就是对等待队列头进行初始化,有俩种办法如下所示:
2.1.1、方法一
使用 DECLARE_WAIT_QUEUE_HEAD 宏静态创建等待队列头,宏定义如下:
#define DECLARE_WAIT_QUEUE_HEAD(name) \
wait_queue_head_t name = __WAIT_QUEUE_HEAD_INITIALIZER(name)
参数 name 表示要定义的队列头名字。通常以全局变量的方式定义,如下所示:
DECLARE_WAIT_QUEUE_HEAD(head);
2.1.1、方法二
使用 init_waitqueue_head 宏动态初始化等待队列头,宏定义如下:
#define init_waitqueue_head(q) \
do { \
static struct lock_class_key __key; \
__init_waitqueue_head((q), #q, &__key); \
} while (0)
参数 q 表示需要初始化的队列头指针。使用宏定义如下所示:
wait_queue_head_t head; //等待队列头
init_waitqueue_head(&head); //初始化等待队列头指针
2.2、创建等待队列项
一般使用宏 DECLARE_WAITQUEUE(name,tsk)给当前正在运行的进程创建并初始化一个等待队列项,宏定义如下:
#define DECLARE_WAITQUEUE(name, tsk) \
struct wait_queue_entry name = __WAITQUEUE_INITIALIZER(name, tsk)
第一个参数 name 是等待队列项的名字,第二个参数 tsk 表示此等待队列项属于哪个任务(进程),一般设置为 current。在 Linux 内核中 current 相当于一个全局变量,表示当前进程。
创建等待队列项如下所示:
DECLARE_WAITQUEUE(wait,current); //给当前正在运行的进程创建一个名为wait的等待队列项。
add_wait_queue(wq,&wait); //将 wait 这个等待队列项加到wq 这个等待队列当中
2.3、添加/删除队列
当设备没有准备就绪(如没有可读数据)而需要进程阻塞的时候,就需要将进程对应的等待队列项添加到前面创建的等待队列中,只有添加到等待队列中以后进程才能进入休眠态。当设备可以访问时(如有可读数据),再将进程对应的等待队列项从等待队列中移除即可。
等待队列项添加队列函数如下所示:
函数原型:
void add_wait_queue(wait_queue_head_t *q,wait_queue_t *wait)
函数功能:
(通过等待队列头)向等待队列中添加队列项
参数含义:
wq_head 表示等待队列项要加入等待队列的等待队列头
wq_entry 表示要加入的等待队列项函数
返回值
无
等待队列项移除队列函数如下所示:
函数原型:
void remove_wait_queue(wait_queue_head_t *q,wait_queue_t *wait)
函数功能:
要删除的等待队列项所处的等待队列头
参数含义:
第一个参数 q 表示等待队列项要加入等待队列的等待队列头
第二个参数 wait 表示要加入的等待队列项函数
返回值:
无
2.4、等待事件
除了主动唤醒以外,也可以设置等待队列等待某个事件,当这个事件满足以后就自动唤醒等待队列中的进程,使用如下所示的宏,是不可中断的阻塞等待。
#define __wait_event(wq_head, condition) (void)___wait_event(wq_head, condition, TASK_UNINTERRUPTIBLE, 0, 0, schedule())
宏定义功能:
不可中断的阻塞等待,让调用进程进入不可中断的睡眠状态,在等待队列里面睡眠直到condition 变成真,被内核唤醒。
参数含义:
第一个参数 wq: wait_queue_head_t 类型变量
第二个参数 condition : 等待条件,为假时才可以进入休眠。如果condition 为真,则不会休眠
除此之外,wait_event_interruptible 的宏是可中断的阻塞等待。
#define __wait_event_interruptible(wq_head, condition) ___wait_event(wq_head, condition, TASK_INTERRUPTIBLE, 0, 0, schedule())
宏含义功能:
可中断的阻塞等待,让调用进程进入可中断的睡眠状态,直到condition 变成真被内核唤醒或信号打断唤醒。
参数含义:
第一个参数 wq :wait_queue_head_t 类型变量
第二个参数 condition :等待条件。为假时才可以进入休眠。如果condition 为真,则不会休眠。
wait_event_timeout() 宏也与 wait_event()类似.不过如果所给的睡眠时间为负数则立即返回.如果在睡眠期间被唤醒,且 condition 为真则返回剩余的睡眠时间,否则继续睡眠直到到达或超过给定的睡眠时间,然后返回 0。
wait_event_interruptible_timeout() 宏与 wait_event_timeout()类似,不过如果在睡眠期间被信号打断则返回 ERESTARTSYS 错误码。
wait_event_interruptible_exclusive() 宏同样和 wait_event_interruptible()一样,不过该睡眠的进程是一个互斥进程
注意:调用的时要确认 condition 值是真还是假,如果调用 condition 为真,则不会休眠。
2.5、等待队列唤醒
当设备可以使用的时候就要唤醒进入休眠态的进程,唤醒可以使用如下俩个函数
函数原型:
wake_up(wait_queue_head_t *q)
函数功能:
唤醒所有休眠进程
参数含义:
q 表示要唤醒的等待队列的等待队列头
函数原型:
wake_up_interruptible(wait_queue_head_t *q)
函数功能:
唤醒可中断的休眠进程
参数含义:
q 表示要唤醒的等待队列的等待队列头
三、等待队列使用方法
步骤一:初始化等待队列头,并将条件置成假(condition=0)。
步骤二:在需要阻塞的地方调用 wait_event(),使进程进入休眠状态。
步骤三:当条件满足时,需要解除休眠,先将条件(condition=1),然后调用wake_up函数唤醒等待队列中的休眠进程。
四、阻塞IO驱动程序示例
4.1、阻塞IO驱动程序
#include 4.2、阻塞IO使用API要点
DECLARE_WAIT_QUEUE_HEAD(read_wq); //定义并初始化等待队列头
wake_up_interruptible(&read_wq); //使用wake_up_interruptible唤醒等待队列中的休眠进程
wait_event_interruptible(read_wq,test_dev->flag); //可中断的阻塞等待,使进程进入休眠态