main函数解析(一)——Linux-0.11 学习笔记(五)
main()函数解析(一)——Linux-0.11 学习笔记(五)
经过了前面的各种铺垫,终于来到了main函数。这篇博客的任务是把init/main.c讲清楚。由于牵扯到很多的函数调用,要想一次就说明白是很难的,所以我们把目标定得低一点,把脉络理清楚就行。
1. 宏定义_syscall0
文件开头的头文件包含等就不多说了。对于C语言比较熟悉的朋友,我想第一个拦路虎就是“GCC内嵌汇编”。
static inline _syscall0(int,fork)
static inline _syscall0(int,pause)
static inline _syscall1(int,setup,void *,BIOS)
static inline _syscall0(int,sync)原理都是类似的,说清楚一个,其他的也就迎刃而解了。
static inline _syscall0(int,fork)_syscall0()是在文件unistd.h中定义,它以内嵌汇编的形式调用 Linux 的系统调用中断 int 0x80。
系统调用(通常称为syscalls)是 Linux内核与上层应用程序进行交互通信的唯一接口。用户程序通过直接或间接(通过库函数)调用中断int 0x80(在eax寄存器中指定系统调用功能号),即可使用内核资源,包括系统硬件资源。
_syscall0()其实是一个宏,这个宏定义在include/unistd.h 文件第 133 行:
#define _syscall0(type,name) \
type name(void) \
{ \
long __res; \
__asm__ volatile ("int $0x80" \
: "=a" (__res) \
: "0" (__NR_##name)); \
if (__res >= 0) \
return (type) __res; \
errno = -__res; \
return -1; \
}第5行:汇编语句,表示系统调用,0x80号中断;
第6行:输出部分,把eax的值传给变量__res;
第7行:输入部分,把__NR_name的值赋给eax,即指明系统调用功能号;
第8~9行: 如果返回值>=0,则直接返回该值;
第10~11行: 否则置出错号errno(全局变量),并返回-1。
顺便提一下,内嵌汇编语法如下。对此不熟悉的朋友可以专门找资料学习。
__asm__(汇编语句模板: 输出部分: 输入部分: 破坏描述部分)根据_syscall0()的宏定义,我们把static inline _syscall0(int,fork)展开,得到:
static inline int fork(void) { long __res; __asm__ volatile ("int $0x80" : "=a" (__res) : "0" (2)); if (__res >= 0) return (int) __res; errno = -__res; return -1; }
实际上展开结果就是上面一行。
可以手工展开,也可以用命令展开。用命令展开的方法是:
首先进入到 Linux-0.11 源码路径下,比如~/oslab/linux-0.11,然后输入命令:
gcc -E init/main.c -o main.i -I./include
如果你还没有实验环境,那赶紧弄一个吧,方法是 Linux 0.11 实验环境搭建或者Linux 0.11 实验环境搭建与调试
以上的展开结果实在是太长了,分行写如下:
static inline int fork(void)
{
long __res;
__asm__ volatile ("int $0x80"
: "=a" (__res)
: "0" (2));
if (__res >= 0)
return (int) __res;
errno = -__res;
return -1;
}第6行:括号里的“2”是因为在文件unistd.h中有#define __NR_fork 2
gcc会把上述“函数”体中的语句直接插入到调用fork()语句的代码处,因此执行fork()不会引起函数调用。另外,宏名称字符串syscall0中最后的0 表示无参数,1表示带1个参数。如果系统调用带有1个参数,那么就应该使用宏_syscall1()。
2. setup.s读取的参数
/*
* This is set up by the setup-routine at boot-time
*/
#define EXT_MEM_K (*(unsigned short *)0x90002)
#define DRIVE_INFO (*(struct drive_info *)0x90080)
#define ORIG_ROOT_DEV (*(unsigned short *)0x901FC)以上三行,右侧的地址其实是setup.s运行时,读取了一些参数,并保存到了相应位置。忘了的同学可以参考我的博文 bootsect.s 分析—— Linux-0.11 学习笔记(一)

EXT_MEM_K (0x9002):系统从 1MB 开始的扩展内存大小,以KB为单位;DRIVE_INFO (0x90080):硬盘参数表,包括第1个和第2个硬盘,共32字节;ORIG_ROOT_DEV:根文件系统所在的设备号3.
3. 读取CMOS实时时钟信息
#define CMOS_READ(addr) ({ \
outb_p(0x80|addr,0x70); \ // 把 (0x80|addr) 写入端口0x70
inb_p(0x71); \ // 读端口0x71
})要想搞清楚上面的代码,就先要弄清楚outb_p和inb_p。outb_p和inb_p都是宏,在文件\include\asm\io.h中定义。
3.1 outb_p(value,port)
#define outb_p(value,port) \
__asm__ ("outb %%al,%%dx\n" \
"\tjmp 1f\n" \
"1:\tjmp 1f\n" \
"1:"::"a" (value),"d" (port))注意:第4行和第5行的“1”是标号。
第2行:把al的值写入端口dx;
第3行:跳转到1处,即下一句;这样写是为了延时;
第4行:同第3行;
第5行:port作为端口号,传给edx; 把eax的值传给value;
所以, outb_p(value,port)表示把value写入端口port.
3.2 inb_p(port)
#define inb_p(port) ({ \
unsigned char _v; \
__asm__ volatile ("inb %%dx,%%al\n" \
"\tjmp 1f\n" \
"1:\tjmp 1f\n" \
"1:":"=a" (_v):"d" (port)); \
_v; \
})第3行:读端口dx到al;
第4~5行:跳转到1处,即下一句;为了延时;
第6行:port作为端口号,传给edx; 把eax的值传给_v;
第7行:_v的值作为整个表达式的返回值。
所以, inb_p(port)表示读取端口port的值。
3.3 outb(value,port)和inb(port)
#define outb(value,port) \
__asm__ ("outb %%al,%%dx"::"a" (value),"d" (port))
#define inb(port) ({ \
unsigned char _v; \
__asm__ volatile ("inb %%dx,%%al":"=a" (_v):"d" (port)); \
_v; \
})既然都分析到这里了,那就把这两个宏也说了吧。这两个宏和上面的差不多,只不过不带延迟。
3.4 CMOS与RTC
PC 机的 CMOS 内存是由电池供电的 64 或 128 字节内存块,通常是系统实时钟芯片RTC (Real Time Chip) 的一部分。有些机器还有更大的内存容量。该 64 字节的CMOS原先在IBM PC-XT机器上用于保存时钟和日期信息,存放的格式是BCD码。由于这些信息仅用去 14 字节,因此剩余的字节就可用来存放一些系统配置数据。
CMOS的地址空间在基本地址空间之外,因此其中不包括可执行代码。要访问它需要通过端口 0x70、 0x71 进行。0x70 是地址端口,0x71 是数据端口。为了读取指定偏移位置的字节,必须首先使用out指令向地址端口 0x70 发送指定字节的偏移位置值,然后使用in指令从数据端口 0x71 读取指定的字节信息。同样,对于写操作也需要首先向地址端口 0x70 发送指定字节的偏移值,然后把数据写到数据端口 0x71 中去。
outb_p(0x80|addr,0x70);把欲读取的字节地址(addr)与0x80进行或操作是没有必要的。因为那时的CMOS内存容量还没有超过128(=111_1111b)字节,因此不需要把b7设为1。之所以会有这样的操作是因为当时Linus手头缺乏有关CMOS方面的资料,CMOS中时钟和日期的偏移地址都是他逐步实验出来的,也许在他的实验中将偏移地址与0x80进行或操作(并且还修改了其他地方)后正好取得了所有正确的结果,因此他的代码中也就有了这步不必要的操作。不过从1.0版本之后,该操作就被去除了。
下表是 CMOS 内存信息的一张简表。
CMOS 64 字节信息简表

3.5 time_init函数
static void time_init(void)
{
struct tm time;
do {
time.tm_sec = CMOS_READ(0); // 秒
time.tm_min = CMOS_READ(2); // 分
time.tm_hour = CMOS_READ(4); // 时
time.tm_mday = CMOS_READ(7); // 日
time.tm_mon = CMOS_READ(8); // 月
time.tm_year = CMOS_READ(9); // 年(since 1900)
} while (time.tm_sec != CMOS_READ(0));
BCD_TO_BIN(time.tm_sec);
BCD_TO_BIN(time.tm_min);
BCD_TO_BIN(time.tm_hour);
BCD_TO_BIN(time.tm_mday);
BCD_TO_BIN(time.tm_mon);
BCD_TO_BIN(time.tm_year);
time.tm_mon--;
startup_time = kernel_mktime(&time);
}结合上面的表格,6~11行非常好懂。
第12行:while (time.tm_sec != CMOS_READ(0));为什么有这个do-while循环呢?
CMOS的访问速度很慢。为了减小时间误差,在读取了所有数值后,若此时CMOS中秒值发生了变化,那么就重新读取所有值。这样内核就能把与CMOS时间误差控制在1秒之内。
注意,读取的值是BCD(Binary Coded Decimal)码格式。
BCD码:是一种十进制数字编码的形式。在这种编码下,每个十进制数字用一串单独的二进制比特来存储与表示。常见的有以4位表示1个十进制数字,称为压缩的BCD码(compressed or packed);或者以8位表示1个十进制数字,称为未压缩的BCD码(uncompressed or zoned)。
比如当前时间是10:35:20,那么读出的二进制数是:
0001_0000b:0011_0101b:0010_0000b
#define BCD_TO_BIN(val) ((val)=((val)&15) + ((val)>>4)*10)
// (val)&15 即 (val)&0xF, 得到个位数;
// (val)>>4)*10 把十位上的数字乘以10;这个宏的作用是把BCD格式的值转换成二进制(或者说十进制,总之存到PC里都是二进制)
time.tm_mon--;
startup_time = kernel_mktime(&time);第2行:调用函数kernel_mktime(),计算从 1970 年 1 月 1 日 0 时起到现在经过的秒数,作为开机时间,保存到全局变量startup_time 中。更具体的分析可以参考我的博文 kernel_mktime() 详解
4. main函数
void main(void) /* This really IS void, no error here. */
{ /* The startup routine assumes (well, ...) this */
/*
* Interrupts are still disabled. Do necessary setups, then
* enable them
*/
ROOT_DEV = ORIG_ROOT_DEV; //0x21C
drive_info = DRIVE_INFO;
memory_end = (1<<20) + (EXT_MEM_K<<10); //EXT_MEM_K = 0x3c00, memory_end = 0x100_0000
memory_end &= 0xfffff000; //0x100_0000 = 16M
if (memory_end > 16*1024*1024)
memory_end = 16*1024*1024;
if (memory_end > 12*1024*1024)
buffer_memory_end = 4*1024*1024; //buffer_memory_end = 4M
else if (memory_end > 6*1024*1024)
buffer_memory_end = 2*1024*1024;
else
buffer_memory_end = 1*1024*1024;
main_memory_start = buffer_memory_end; //4M
#ifdef RAMDISK_SIZE //=1025
main_memory_start += rd_init(main_memory_start, RAMDISK_SIZE*1024);
#endif
mem_init(main_memory_start,memory_end);
trap_init();
blk_dev_init();
chr_dev_init();
tty_init();
time_init();
sched_init();
buffer_init(buffer_memory_end);
hd_init();
floppy_init();
sti();
move_to_user_mode();
if (!fork()) { /* we count on this going ok */
init();
}
/*
* NOTE!! For any other task 'pause()' would mean we have to get a
* signal to awaken, but task0 is the sole exception (see 'schedule()')
* as task 0 gets activated at every idle moment (when no other tasks
* can run). For task0 'pause()' just means we go check if some other
* task can run, and if not we return here.
*/
for(;;) pause();
}
4.1 根设备号
ROOT_DEV = ORIG_ROOT_DEV;在 fs/super.c 中,定义了 int ROOT_DEV = 0;
本文件内有宏定义
#define ORIG_ROOT_DEV (*(unsigned short *)0x901FC)
ROOT_DEV = ORIG_ROOT_DEV;这条语句执行后(依据我的实验环境),ROOT_DEV = 0x21C
在bootsect.s中,有
mov %cs:root_dev+0, %ax
cmp $0, %ax
jne root_defined
mov %cs:sectors+0, %bx
mov $0x0208, %ax # /dev/ps0 - 1.2Mb
cmp $15, %bx
je root_defined
mov $0x021c, %ax # /dev/PS0 - 1.44Mb, excute here when debug
cmp $18, %bx
je root_defined
undef_root:
jmp undef_root
root_defined:
mov %ax, %cs:root_dev+0
...
.org 508
root_dev:
.word ROOT_DEV !这里存放根文件系统所在设备号(init/main.c中会用)设备号 = 主设备号*256 + 次设备号(也即 dev_no = (major << 8) + minor )
在 Linux 中软驱的主设备号是 2,次设备号 = type*4 + nr,其中 nr 为 0-3 分别对应软驱 A、B、C 或 D; type 是软驱的类型(2 表示1.2 MB 或 7 表示 1.44 MB 等)。
0x21C = 2<<8 + (7*4+0),所以根设备是 1.44M 的 A 驱动器。
4.2 计算主内存起始位置
memory_end = (1<<20) + (EXT_MEM_K<<10); //EXT_MEM_K = 0x3c00, memory_end = 0x100_0000
memory_end &= 0xfffff000; //0x100_0000 = 16M
if (memory_end > 16*1024*1024) //如果内存超过16M,则按16M计
memory_end = 16*1024*1024;
if (memory_end > 12*1024*1024) //如果内存超过12M,则设置缓冲区末端=4M
buffer_memory_end = 4*1024*1024; //buffer_memory_end = 4M
else if (memory_end > 6*1024*1024)//如果内存超过6M,则设置缓冲区末端=2M
buffer_memory_end = 2*1024*1024;
else
buffer_memory_end = 1*1024*1024;//否则设置缓冲区末端=1M
main_memory_start = buffer_memory_end; //主内存起始位置=缓冲区末端注意,代码注释部分的值是我通过实验测试出来的,你的实验环境不一定是这个值。
第1行:计算出内存大小
第2行:忽略不到4KB的内存数
在我的环境中,通过单步调试,代码执行第6行,也就是说缓冲区末端(buffer_memory_end)在4M处,也就是主内存的起始位置(main_memory_start)。
4.3 虚拟盘
#ifdef RAMDISK_SIZE // 如果定义了虚拟盘
main_memory_start += rd_init(main_memory_start, RAMDISK_SIZE*1024);
#endif当 linux/Makefile文件中设置的RAMDISK值不为零时,表示系统会创建 RAM 虚拟盘设备。 在这种情况下,就会执行第2行,即主内存区的起始地址后移,也就是说主内存区头部还要划去一部分,供虚拟盘存放数据。
根据单步调试的结果,main_memory_start = 4194304(4M),RAMDISK_SIZE = 1025

如图所示,内核程序占据在物理内存的开始部分,接下来是供硬盘或软盘等块设备使用的高速缓冲区部分(其中要扣除显卡内存和 ROM BIOS 所占用的内存,它们的地址范围是640KB~1MB)。
关于高速缓冲区:当一个进程需要读取块设备中的数据时,系统会首先把数据读到高速缓冲区中;当有数据需要写到块设备上时,系统也是先将数据放到高速缓冲区中,然后由块设备驱动程序写到相应的设备上。
内存的最后部分是供所有程序可以随时申请和使用的主内存区。内核程序在使用主内存区时,也同样先要向内核内存管理模块提出申请,在申请成功后方能使用。
对于含有 RAM 虚拟盘的系统,主内存区头部还要划去一部分,供虚拟盘存放数据。
long rd_init(long mem_start, int length)
{
int i;
char *cp;
blk_dev[MAJOR_NR/*=1*/].request_fn = DEVICE_REQUEST;
rd_start = (char *) mem_start;
rd_length = length;
cp = rd_start;
for (i=0; i < length; i++)
*cp++ = '\0';
return(length);
}第6行:MAJOR_NR的值是1。
blk_dev是一个数组,其成员类型是struct blk_dev_struct
struct blk_dev_struct blk_dev[NR_BLK_DEV] = {
{ NULL, NULL }, /* no_dev */
{ NULL, NULL }, /* dev mem */
{ NULL, NULL }, /* dev fd */
{ NULL, NULL }, /* dev hd */
{ NULL, NULL }, /* dev ttyx */
{ NULL, NULL }, /* dev tty */
{ NULL, NULL } /* dev lp */
};struct blk_dev_struct的定义是
struct blk_dev_struct {
void (*request_fn)(void);
struct request * current_request;
};可以看出,2个成员都是指针,request_fn指向函数,current_request指向struct request.
回到函数rd_init:
blk_dev[MAJOR_NR/*=1*/].request_fn = DEVICE_REQUEST;
DEVICE_REQUEST实际上是设备请求函数do_rd_request
因为#define DEVICE_REQUEST do_rd_request
void do_rd_request(void)
{
int len;
char *addr;
INIT_REQUEST;
addr = rd_start + (CURRENT->sector << 9);
len = CURRENT->nr_sectors << 9;
if ((MINOR(CURRENT->dev) != 1) || (addr+len > rd_start+rd_length)) {
end_request(0);
goto repeat;
}
if (CURRENT-> cmd == WRITE) {
(void) memcpy(addr,
CURRENT->buffer,
len);
} else if (CURRENT->cmd == READ) {
(void) memcpy(CURRENT->buffer,
addr,
len);
} else
panic("unknown ramdisk-command");
end_request(1);
goto repeat;
}此函数的代码,我们先不深入,以后用到再说。我们关注的是rd_init函数的以下几行:
rd_start = (char *) mem_start;
rd_length = length;
cp = rd_start; // cp是 char * 类型
for (i=0; i < length; i++)
*cp++ = '\0'; //以上3行, 盘区清零
return(length);rd_start和rd_length都是全局变量,定义在文件kernel\blk_drv\ramdisk.c中:
char *rd_start; //虚拟盘的起始地址
int rd_length = 0; //虚拟盘空间大小,以B为单位4.4 mem_init函数
该函数对1MB以上内存区域以页面为单位进行管理前的初始化设置工作。
一个页面长度为4KB字节。该函数把1MB以上所有物理内存划分成一个个页面,并使用一个页面映射字节数组mem_map[] 来管理这些页面。对于具有 16MB 内存容量的机器,该数组共有3840( (16M-1M)/4K=3840 )项 ,即可管理3840个物理页面。
每当一个物理内存页面被占用时就把 mem_map[]中对应的的字节值增1 ;若释放一个物理页面,就把对应字节值减 1。 若字节值为0 , 则表示对应页面空闲; 若字节值 >=1,则表示对应页面被占用或被不同程序共享占用。
在该版本内核中,最多能管理16MB的物理内存,大于16MB的内存将弃掉不用。对于具有16MB内存的PC机系统,在没有设置虚拟盘 RAMDISK 的情况下start_mem通常是4MB,end_mem是 16MB。因此主内存区范围是4MB~16MB,共有3072个物理页面可供分配。如果设置了 RAMDISK,那么start_mem会大于4MB,比如我的实验环境是5243904(=5121K)即RAMDISK占用了1025K(=5121K-4096K).
void mem_init(long start_mem, long end_mem)
{
int i;
HIGH_MEMORY = end_mem;
// 参数start_mem是可用作页面分配的主内存区起始地址
//(已去除RAMDISK所占内存空间)。
// end_mem是实际物理内存最大地址。
//地址范围start_mem到end_mem是主内存区。
for (i=0 ; i//PAGING_PAGES = 3840
mem_map[i] = USED;
i = MAP_NR(start_mem); // i=主内存区起始位置处页面号
end_mem -= start_mem; // 首尾相减,算出主内存区的大小
end_mem >>= 12; // 主内存区的总页面数
while (end_mem-->0)
mem_map[i++]=0; // 以上2行, 主内存区页面对应字节值清零
} 第11~12行: 首先将 1MB 到 16MB 范围内所有内存页面设置为已占用状态,即各项字节值全部设置成 USED(100)
PAGING_PAGES 被定义为(PAGING_MEM0RY>>12),即(15*1024*1024)>>12=3840
#define LOW_MEM 0x100000
#define PAGING_MEMORY (15*1024*1024)
#define PAGING_PAGES (PAGING_MEMORY>>12)
#define MAP_NR(addr) (((addr)-LOW_MEM)>>12)
#define USED 100第13行:MAP_NR(start_mem) 即是(start_mem-0x100000)>>12,计算出主内存区起始位置处页面号。
4.5 trap_init函数
void trap_init(void)
{
int i;
set_trap_gate(0,÷_error);
set_trap_gate(1,&debug);
set_trap_gate(2,&nmi);
set_system_gate(3,&int3); /* int3-5 can be called from all */
set_system_gate(4,&overflow);
set_system_gate(5,&bounds);
...
...
}以上代码主要是安装陷阱门。我们拿第5行作为例子,具体分析一下。
4.5.1 set_trap_gate(n,addr)
set_trap_gate(n,addr)其实是_set_gate(&idt[n],15,0,addr),也就是下面7~15行的内嵌汇编代码。
#define set_trap_gate(n,addr) \
_set_gate(&idt[n],15,0,addr)
...
#define _set_gate(gate_addr,type,dpl,addr) \
__asm__ ("movw %%dx,%%ax\n\t" \
"movw %0,%%dx\n\t" \
"movl %%eax,%1\n\t" \
"movl %%edx,%2" \
: \
: "i" ((short) (0x8000+(dpl<<13)+(type<<8))), \
"o" (*((char *) (gate_addr))), \
"o" (*(4+(char *) (gate_addr))), \
"d" ((char *) (addr)),"a" (0x00080000))d: 表示 edx
a: 表示 eax
i: 允许一个立即整形操作数,包括其值仅在汇编时确定的符号常量。
o: 允许一个内存操作数,但只有当地址是可偏移的。即该地址加上一个小的偏移量,结果是一个有效的内存地址。
以上内嵌汇编代码没有输出部分,仅有输入部分。
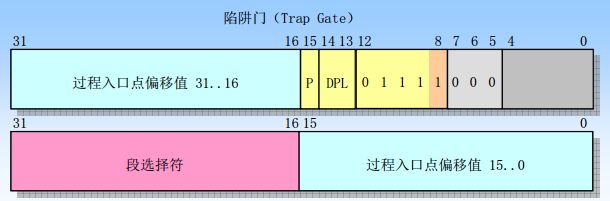
上图是陷阱门的格式,上面是高4字节(代码中用 edx 表示),下面是低4字节(代码中用 eax 表示)。注意:过程入口点偏移值不是物理地址,而是线性地址。
第15行:
"d" ((char *) (addr))表示用 addr 加载edx;此时,偏移值的[31:16]就位。
addr 是异常处理函数入口点的地址。因为内核代码段的线性基址是0,所以偏移值等于函数的线性地址,又因为内核在之前的分页中采用了恒等映射机制——线性地址等于物理地址,所以偏移值等于函数的物理地址。
"a" (0x00080000) :表示用 0x0008_0000 加载 eax;此时,段选择符就位。
段选择子(符)的值是0x08,为什么是这个值呢?因为在进入main函数之前,已经设置好了GDT,0x08是代码段的选择子。忘了的话可以参考我的博文head.s——第三节。
第7行的"movw %%dx,%%ax\n\t"表示用 dx 加载 ax;此时,偏移值的[15:0]就位,eax也就位。
第8行的"movw %0,%%dx\n\t",表示用(0x8000+(dpl<<13)+(type<<8))加载 dx,
这里的 8 表示 P=1; 此时,edx 就位。
根据_set_gate(&idt[n],15,0,addr)的参数可知type=15(表示陷阱门), dpl=0。(0x8000+(dpl<<13)+(type<<8))拼出了陷阱门的第4~5字节(edx的低字)。
第9行"movl %%eax,%1\n\t"表示把 eax 的值赋给*((char *) (gate_addr)),就是赋给idt[n]的前4字节。
第10行"movl %%edx,%2" 表示把edx的值赋给*(4+(char *)(gate_addr)),就是赋给idt[n]的后4字节。这8字节拼起来就是完整的idt[n].
4.5.2 idt数组
idt是中断描述符表(其实是数组),一共有 256 个表项,一个表项占8字节。
%1对应第13行的(*((char *) (gate_addr)))
gate_addr就是第2行的&idt[n],那么idt是什么呢?在文件include\linux\head.h中有:
typedef struct desc_struct {
unsigned long a,b;
} desc_table[256];
extern desc_table idt,gdt;1~3行:为struct desc_struct [256]取了一个别名——desc_table,也就是说desc_table的类型是“struct desc_struct类型的数组”。
第6行,注意extern关键字,声明(而不是定义)了 idt 和 gdt,它们的类型都是desc_table,即“struct desc_struct类型的数组”。所以,&idt[n]是数组idt第n个元素的地址。
可能有人要问, idt 和 gdt的定义在哪里呢?
它们是在汇编代码boot/head.s中定义的。
在本文件末尾有:
idt: .fill 256,8,0 # idt is uninitialized
gdt:
.quad 0x0000000000000000 /* NULL descriptor */
.quad 0x00c09a0000000fff /* 16Mb */
.quad 0x00c0920000000fff /* 16Mb */
.quad 0x0000000000000000 /* TEMPORARY - don't use */
.fill 252,8,0 /* space for LDT's and TSS's etc */另外本文件开头有
.globl idt,gdt,pg_dir,tmp_floppy_area.globl xxx表示把符号xxx声明为全局变量/标号,以供其他源文件访问。
4.5.3 _set_gate(gate_addr,type,dpl,addr)总结
#define _set_gate(gate_addr,type,dpl,addr) \
__asm__ ("movw %%dx,%%ax\n\t" \ //将偏移地址低字与选择符组合成描述符低4字节(eax)
"movw %0,%%dx\n\t" \ //将类型标志与偏移地址高字组合成描述符高4字节(edx)
"movl %%eax,%1\n\t" \ //分别设置门描述符的低4字节和高4字节
"movl %%edx,%2" \
: \
: "i" ((short) (0x8000+(dpl<<13)+(type<<8))), \
"o" (*((char *) (gate_addr))), \
"o" (*(4+(char *) (gate_addr))), \
"d" ((char *) (addr)),"a" (0x00080000))_set_gate(gate_addr,type,dpl,addr)此宏用于设置门描述符。
根据参数中的中断或异常处理过程地址 addr 、门描述符类型 type 和特权级信息 dpl ,设置位于地址 gate_addr 处的门描述符。(注意:下面的“偏移”是相对于内核代码或数据段来说的。)
gate_addr:描述符存储地址;
type:描述符类型;
dpl:描述符特权级;
addr:偏移地址。
%0:由dpl,type组合成的类型值;
%1:描述符低 4 字节的存储地址;
%2:描述符高 4 字节的存储地址;
%3:edx(程序偏移地址addr);
%4: eax(高字中含有段选择符0x8) 。
4.5.4 set_system_gate(n,addr)
#define set_system_gate(n,addr) \
_set_gate(&idt[n],15,3,addr)这个宏和set_trap_gate(n,addr)的区别仅有一点:前者的dpl=3,后者的dpl=0;
分析到这里, trap_init函数的大意已经明了。
void trap_init(void)
{
int i;
set_trap_gate(0,÷_error);
set_trap_gate(1,&debug);
set_trap_gate(2,&nmi);
set_system_gate(3,&int3); /* int3-5 can be called from all */
set_system_gate(4,&overflow);
set_system_gate(5,&bounds);
set_trap_gate(6,&invalid_op);
set_trap_gate(7,&device_not_available);
set_trap_gate(8,&double_fault);
set_trap_gate(9,&coprocessor_segment_overrun);
set_trap_gate(10,&invalid_TSS);
set_trap_gate(11,&segment_not_present);
set_trap_gate(12,&stack_segment);
set_trap_gate(13,&general_protection);
set_trap_gate(14,&page_fault);
set_trap_gate(15,&reserved);
set_trap_gate(16,&coprocessor_error);
for (i=17;i<48;i++)
set_trap_gate(i,&reserved);
set_trap_gate(45,&irq13); // 设置协处理器中断0x2d(=45)的陷阱门描述符
outb_p(inb_p(0x21)&0xfb,0x21); // 允许8259A主芯片的IRQ2中断请求
outb(inb_p(0xA1)&0xdf,0xA1);
set_trap_gate(39,¶llel_interrupt); //设置并行口1的中断0x27(=39)陷阱门描述符
}
5~2行:设置IDT的描述符。其中断点陷阱中断int3、溢出中断overflow、边界出错中断bounds可以由任何程序产生。
22~23行:把int 17 ~ int 48的陷阱门先设置为reserved,以后各个硬件初始化时会重新设置自己的陷阱门。
注意:set_trap_gate的第二个参数是中断处理函数的入口点,它们的代码在文件linux/kernel/asm.s或者linux/kernel/system_call.s中。
第25行:outb_p(inb_p(0x21)&0xfb,0x21);
0x21是 8259A 主片命令字OCW1的端口地址,用于对其中断屏蔽寄存器 IMR 进行读/写操作。
inb_p(0x21)&0xfb读出 IMR 的值,然后与0xfb(=1111_1011b),即清零D2位,也就是允许主片的 IRQ2 中断请求。

注意:Linux-0.11 系统把主片的 ICW2 设置为 0x20,表示主片中断请求0~7级对应的中断号是 0x20~0x27;把从片的 ICW2 设置成 0x28,表示从片中断请求8~15级对应的中断号是 0x28~0x2f。
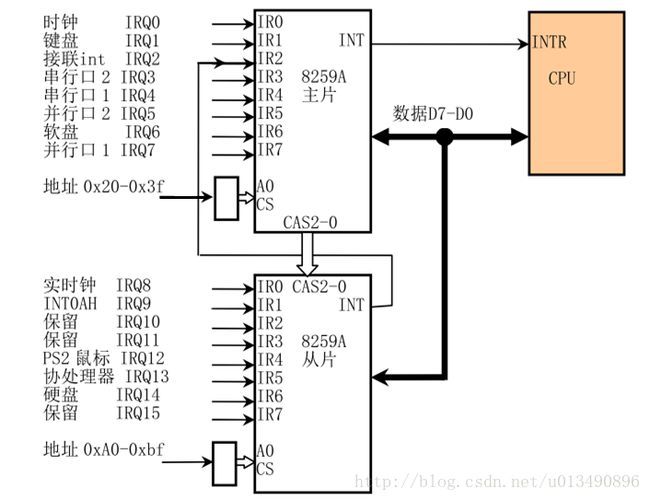
第26行:outb(inb_p(0xA1)&0xdf,0xA1);
0xA1是 8259A 从片命令字OCW1的端口地址。原理同上,inb_p(0xA1)&0xdf读出从片 IMR 的值,然后与0xdf(=1101_1111),即清零D5位,由上图可知,允许从片 IRQ13 协处理器中断。
关于8259A的编程,可以参考我的博文: 详解8259A
囿于篇幅,对main()函数的分析先到这里,剩下的内容下次再说。谢谢您的阅读!
—【未完待续】—
参考资料
《Linux内核完全剖析》(赵炯,机械工业出版社,2006)