【扩散模型】扩散模型讲解以及基础代码运用 附知识链接
李宏毅教学视频:
Link1
B站DDPM公式推导以及代码实现:
Link2
这个视频里面有论文里面的公式推导,并且1小时10分开始讲解实例代码。
后面一段时间看了一些其他博客,更加明白了。
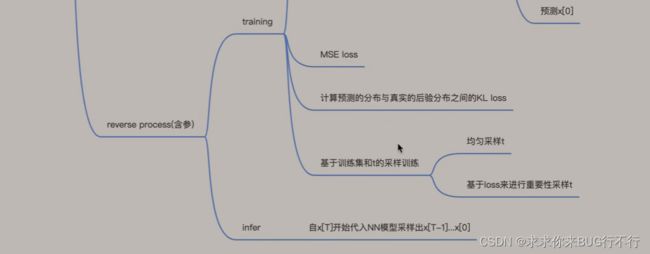
就是通过将概率变为均匀分布的形式。正向添加噪声通过重采样技巧可以直接从t和噪声得到。反向推的时候借助一个多条件分布,然后通过各种变换,求得这个概率分布的均值和方差,然后根据公式Sample。
https://segmentfault.com/a/1190000043744225 扩散模型(Diffusion Model)详解:直观理解、数学原理、PyTorch (代码实现)
https://blog.csdn.net/qq_40714949/article/details/126643111 简单基础入门理解Denoising Diffusion Probabilistic Model,DDPM扩散模型
https://blog.csdn.net/zhL816/article/details/127990163 DDPM(Denoising Diffusion Probabilistic Models)扩散模型简述
https://blog.csdn.net/Little_White_9/article/details/124435560 VLB公式推导
思维图:

文章目录
-
- 扩散模型概念:
- Diffusion Model工作原理:
- 影像生成模型本质上的共同目标
- B站简单示例代码讲解
扩散模型概念:
就像石头里面已经有了雕塑,只需要看我们怎么把其他多余的部分去掉。

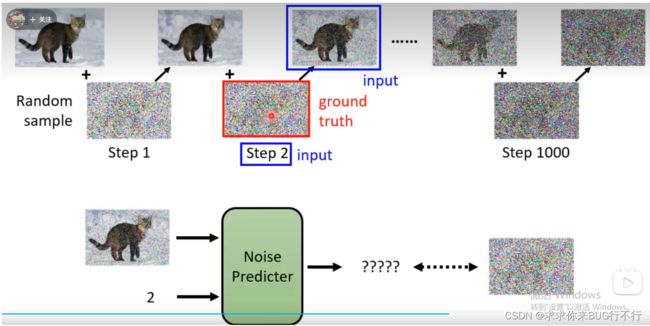
注意观察,我们每一个Denoise阶段都不一样,因为每一个阶段传入的图片以及需要处理的noise都不一样,并且直接产生图片比直接产生噪音更难,所以我们通过预测noise来解决问题。

比如下图所示:step2是我们加的噪声,那么传入input和2的时候就希望预测出gt了,然后进行相减得到step1的图片。
Diffusion Model工作原理:
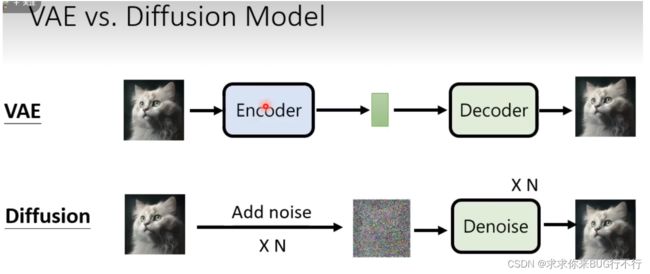
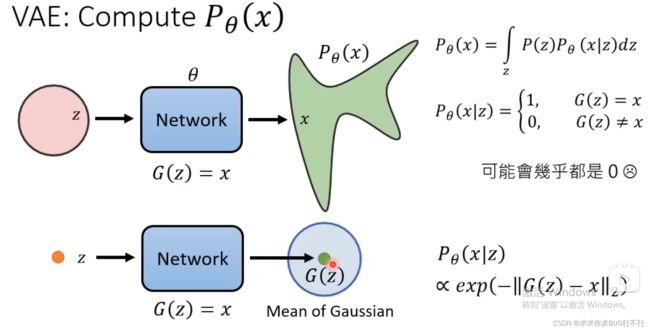
VAE和Diffusion的区别
先看整个训练过程:
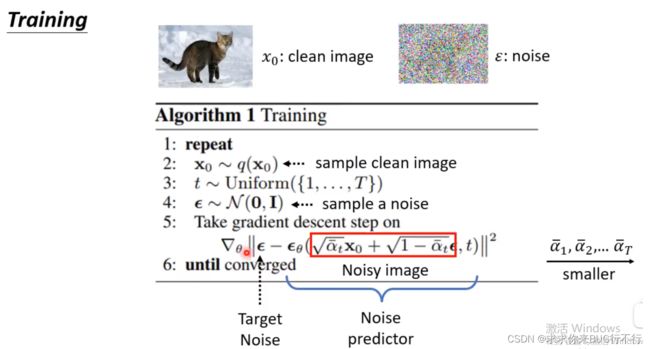
实际结果和我们想的是不一样的。训练时通过X0和噪声得到一个图,逆向的时候输入t和生成的图来得到噪音。想象的是一点一点加入噪音,实际上是直接加进去的。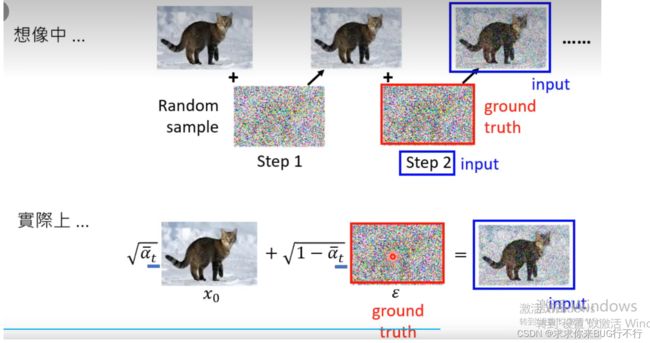
推断时刻:theat是带有参数的网络。
影像生成模型本质上的共同目标
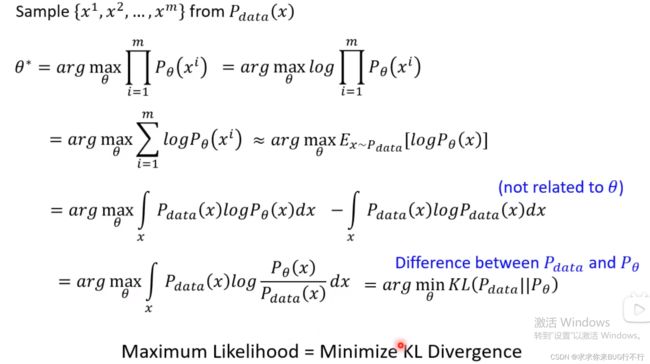
通过采样一个高深distribution生成一个图片。希望生成的图片和真实的图片的distribution很接近。

那么怎么衡量这两个分布的接近程度呢?多数采用的都是Maximum liklihood Estimation.
我们希望我们采样的数据能够通过theta网络计算出来的概率越大越好。 
通过数学变换,将概率最大变为Pdata和Ptheat这两个distribution的KL散度最小。
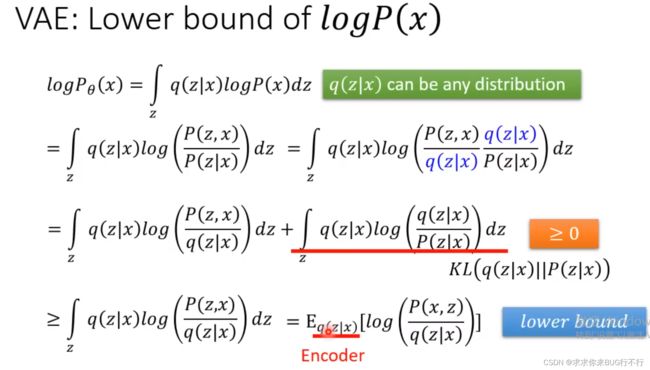
VAE的下界
Ptheat(x)表示:通过theta产生x的概率。
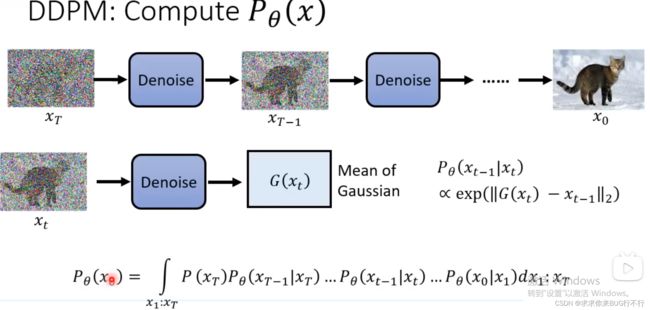
DDPM计算Ptheta(x)的方法 下图表示产生X0的概率。
两者对比
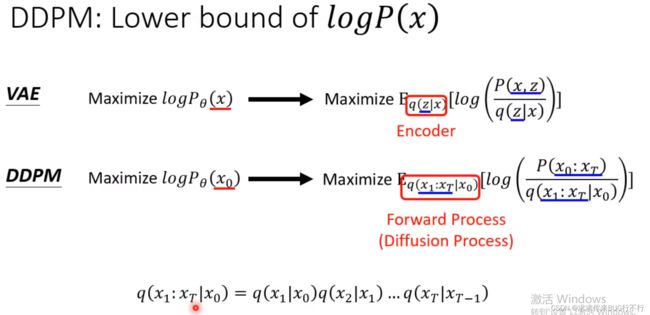
接下来需要计算q(x1|x0)此类公式。
计算方法:X1到X2的计算方法在论文中有提及。
两个高斯分布都是服从N(0,1),相加的话还是一个高斯分布,并且还是服从N(0,1),只是前面系数会发生变化。系数的话是根号下面数字相加。所以相加之后均值还是为0,方差a方加b方即可,这个在另外一个视频里面有讲解。


经过一番推导之后得到:

之后计算最下面三项:
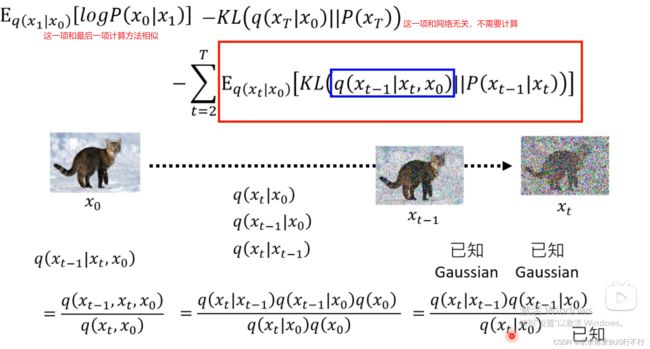
通过以下推导:
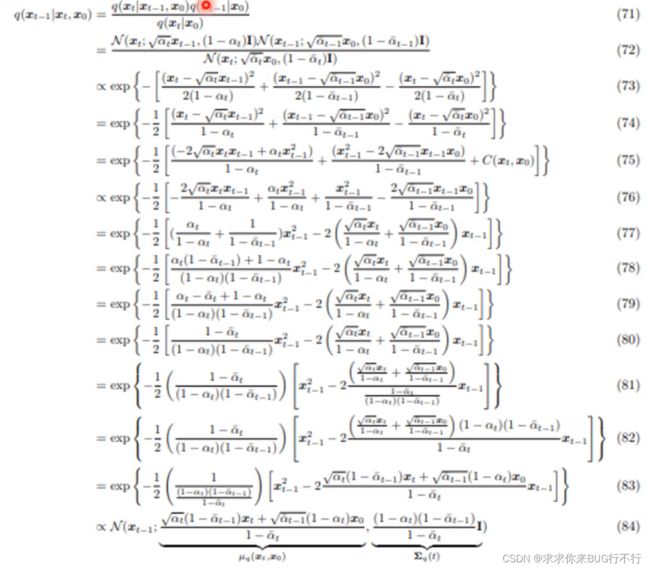
之后通过X0,Xt可以得到Xt-1的分布。
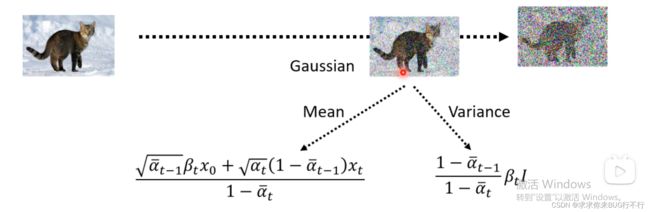
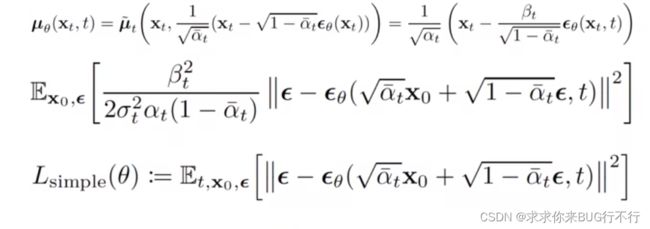
可以看到前面一项的mean 和 variance是固定的,第二项的variance也是固定的,因此我们需要把第二项的mean变得和第一项的接近。
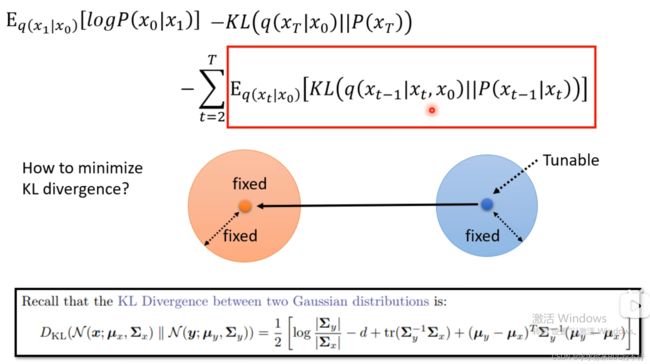
那么怎么minimiaze这个mean呢?希望用Xt去预测出来那个mean。
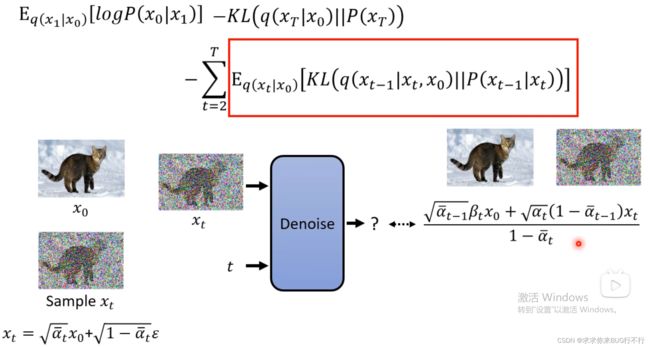
经过推导:

最终得到下图:
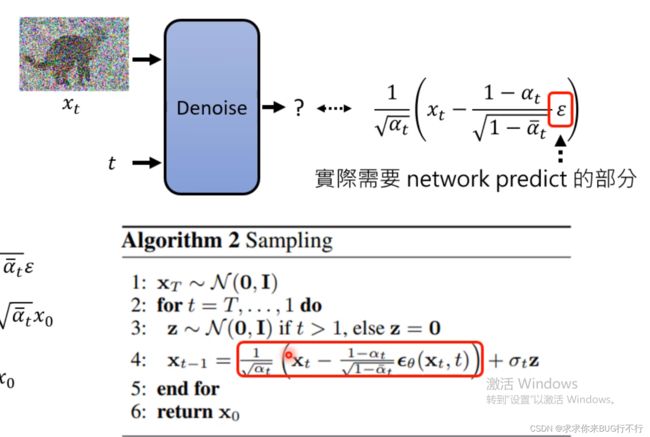
里面beta可以学习,但是效果不好,所以使用线性固定。最后加上一个噪声猜测是为了增强鲁棒性,并且本身就是从噪声开始,不加噪声的话可能不会生成图片。
B站简单示例代码讲解
# 加载数据集
%matplotlib inline
import matplotlib.pyplot as plt
import numpy as np
from sklearn.datasets import make_s_curve
import torch
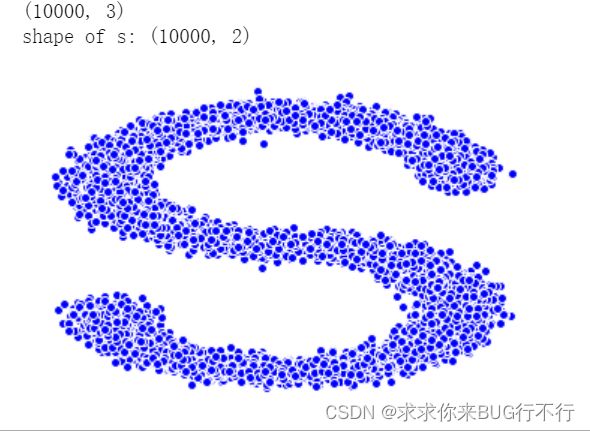
s_curve,_ = make_s_curve(10**4,noise=0.1)
print(np.shape(s_curve))
s_curve = s_curve[:,[0,2]]/10.0
print("shape of s:",np.shape(s_curve))
data = s_curve.T
fig,ax = plt.subplots()
ax.scatter(*data,color='blue',edgecolor='white');
ax.axis('off')
dataset = torch.Tensor(s_curve).float()
# 2确定超参数的值
num_steps = 100
#制定每一步的beta
betas = torch.linspace(-6,6,num_steps)
betas = torch.sigmoid(betas)*(0.5e-2 - 1e-5)+1e-5
#计算alpha、alpha_prod、alpha_prod_previous、alpha_bar_sqrt等变量的值
alphas = 1-betas
alphas_prod = torch.cumprod(alphas,0)
# print(alphas_prod)
alphas_prod_p = torch.cat([torch.tensor([1]).float(),alphas_prod[:-1]],0)
# print(alphas_prod_p)
alphas_bar_sqrt = torch.sqrt(alphas_prod)
one_minus_alphas_bar_log = torch.log(1 - alphas_prod)
one_minus_alphas_bar_sqrt = torch.sqrt(1 - alphas_prod)
assert alphas.shape==alphas_prod.shape==alphas_prod_p.shape==\
alphas_bar_sqrt.shape==one_minus_alphas_bar_log.shape\
==one_minus_alphas_bar_sqrt.shape
print("all the same shape",betas.shape)
、确定扩散过程任意时刻的采样值
#3 计算任意时刻的x采样值,基于x_0和重参数化
def q_x(x_0,t):
"""可以基于x[0]得到任意时刻t的x[t]"""
noise = torch.randn_like(x_0)
alphas_t = alphas_bar_sqrt[t]
alphas_1_m_t = one_minus_alphas_bar_sqrt[t]
return (alphas_t * x_0 + alphas_1_m_t * noise)#在x[0]的基础上添加噪声
j
# 4 演示原始数据分布加噪100步后的结果
num_shows = 20
fig,axs = plt.subplots(2,10,figsize=(28,3))
plt.rc('text',color='black')
#共有10000个点,每个点包含两个坐标
#生成100步以内每隔5步加噪声后的图像
for i in range(num_shows):
j = i//10
k = i%10
q_i = q_x(dataset,torch.tensor([i*num_steps//num_shows]))#生成t时刻的采样数据
axs[j,k].scatter(q_i[:,0],q_i[:,1],color='red',edgecolor='white')
axs[j,k].set_axis_off()
axs[j,k].set_title('$q(\mathbf{x}_{'+str(i*num_steps//num_shows)+'})$')

# 5 编写拟合逆扩散过程高斯分布的模型
import torch
import torch.nn as nn
class MLPDiffusion(nn.Module):
def __init__(self,n_steps,num_units=128):
super(MLPDiffusion,self).__init__()
self.linears = nn.ModuleList(
[
nn.Linear(2,num_units),
nn.ReLU(),
nn.Linear(num_units,num_units),
nn.ReLU(),
nn.Linear(num_units,num_units),
nn.ReLU(),
nn.Linear(num_units,2),
]
)
self.step_embeddings = nn.ModuleList(
[
nn.Embedding(n_steps,num_units),
nn.Embedding(n_steps,num_units),
nn.Embedding(n_steps,num_units),
]
)
def forward(self,x,t):
# x = x_0
for idx,embedding_layer in enumerate(self.step_embeddings):
t_embedding = embedding_layer(t)
x = self.linears[2*idx](x)
x += t_embedding
x = self.linears[2*idx+1](x)
x = self.linears[-1](x)
return x
loss_fn 就是Lsimple得表达式。通过传入参数,生成一个随机噪声,并且送入model里面,那么上面也讲了,model的作用是根据X0,和t预测出我们应该减去的噪声,所以损失函数就是用生成的噪声减去预测的噪声。
# 6 编写训练的误差函数
def diffusion_loss_fn(model,x_0,alphas_bar_sqrt,one_minus_alphas_bar_sqrt,n_steps):
"""对任意时刻t进行采样计算loss"""
batch_size = x_0.shape[0]
#对一个batchsize样本生成随机的时刻t
t = torch.randint(0,n_steps,size=(batch_size//2,))
t = torch.cat([t,n_steps-1-t],dim=0)
t = t.unsqueeze(-1)
#x0的系数
a = alphas_bar_sqrt[t]
#eps的系数
aml = one_minus_alphas_bar_sqrt[t]
#生成随机噪音eps
e = torch.randn_like(x_0)
#构造模型的输入
x = x_0*a+e*aml
#送入模型,得到t时刻的随机噪声预测值
output = model(x,t.squeeze(-1))
#与真实噪声一起计算误差,求平均值
return torch.pow((e - output),2).mean()
# 7、编写逆扩散采样函数(inference)
def p_sample_loop(model,shape,n_steps,betas,one_minus_alphas_bar_sqrt):
"""从x[T]恢复x[T-1]、x[T-2]|...x[0]"""
cur_x = torch.randn(shape)
x_seq = [cur_x]
for i in reversed(range(n_steps)):
cur_x = p_sample(model,cur_x,i,betas,one_minus_alphas_bar_sqrt)
x_seq.append(cur_x)
return x_seq
def p_sample(model,x,t,betas,one_minus_alphas_bar_sqrt):
"""从x[T]采样t时刻的重构值"""
t = torch.tensor([t])
coeff = betas[t] / one_minus_alphas_bar_sqrt[t]
eps_theta = model(x,t)
mean = (1/(1-betas[t]).sqrt())*(x-(coeff*eps_theta))
z = torch.randn_like(x)
sigma_t = betas[t].sqrt()
sample = mean + sigma_t * z
return (sample)
# 8、开始训练模型,打印loss及中间重构效果
seed = 1234
class EMA():
"""构建一个参数平滑器"""
def __init__(self,mu=0.01):
self.mu = mu
self.shadow = {}
def register(self,name,val):
self.shadow[name] = val.clone()
def __call__(self,name,x):
assert name in self.shadow
new_average = self.mu * x + (1.0-self.mu)*self.shadow[name]
self.shadow[name] = new_average.clone()
return new_average
print('Training model...')
batch_size = 128
dataloader = torch.utils.data.DataLoader(dataset,batch_size=batch_size,shuffle=True)
num_epoch = 4000
plt.rc('text',color='blue')
model = MLPDiffusion(num_steps)#输出维度是2,输入是x和step
optimizer = torch.optim.Adam(model.parameters(),lr=1e-3)
for t in range(num_epoch):
for idx,batch_x in enumerate(dataloader):
loss = diffusion_loss_fn(model,batch_x,alphas_bar_sqrt,one_minus_alphas_bar_sqrt,num_steps)
optimizer.zero_grad()
loss.backward()
torch.nn.utils.clip_grad_norm_(model.parameters(),1.)
optimizer.step()
if(t%100==0):
print(loss)
x_seq = p_sample_loop(model,dataset.shape,num_steps,betas,one_minus_alphas_bar_sqrt)
fig,axs = plt.subplots(1,10,figsize=(28,3))
for i in range(1,11):
cur_x = x_seq[i*10].detach()
axs[i-1].scatter(cur_x[:,0],cur_x[:,1],color='red',edgecolor='white');
axs[i-1].set_axis_off();
axs[i-1].set_title('$q(\mathbf{x}_{'+str(i*10)+'})$')
最后的演示
动画演示扩散过程和逆扩散过程
import io
from PIL import Image
imgs = []
for i in range(100):
plt.clf()
q_i = q_x(dataset,torch.tensor([i]))
plt.scatter(q_i[:,0],q_i[:,1],color='red',edgecolor='white',s=5);
plt.axis('off');
img_buf = io.BytesIO()
plt.savefig(img_buf,format='png')
img = Image.open(img_buf)
imgs.append(img)
mg = Image.open(img_buf)
reverse.append(img)
reverse = []
for i in range(100):
plt.clf()
cur_x = x_seq[i].detach()
plt.scatter(cur_x[:,0],cur_x[:,1],color='red',edgecolor='white',s=5);
plt.axis('off')
img_buf = io.BytesIO()
plt.savefig(img_buf,format='png')
img = Image.open(img_buf)
reverse.append(img)
imgs = imgs +reverse
imgs[0].save("diffusion.gif",format='GIF',append_images=imgs,save_all=True,duration=100,loop=0)