STM32学习笔记(3) TIM基本定时器
目录
1.基本定时器
2.基本定时器TIM的工作原理
2.1范例:定时1ms的计算
3.程序流程:
3.1配置时基初始化结构体
3.1.1时钟线的选择
3.1.2开启定时器更新中断
3.1.3TIM_ClearFlag()和函数TIM_ClearITPendingBit()区别
3.1.4允许更新中断函数及其寄存器DIER
3.2配置中断优先级
3.2.1移位
3.3使能定时器
3.4编写中断服务函数
3.5Main函数
4.代码示例
1.基本定时器
功能:定时,无PWM

● 计数器寄存器(TIMx_CNT)
● 预分频寄存器(TIMx_PSC)
● 自动重装载寄存器(TIMx_ARR)
2.基本定时器TIM的工作原理
来自内部时钟源的CK_PSC(频率=72MHz,72*10^6)进入到预分频器,预分频器PSC再对内部时钟CK_PSC分频,得到计数器时钟 CK_CNT = CK_PSC/(PSC+1)

当CNT_EN使能为1后,计数器CNT在CK_CNT时钟信号下,从0开始计数,电压周期性(计数一次的时间 1/CK_CNT) 的变为1/0,电压每变为1就记作是一次,当CNT的值与ARR的值相等时,就自动生成事件,且CNT自动清0,再重新开始计数
2.1范例:定时1ms的计算
PSC=72-1,
72MHz=1/(72*10^6)us
CNT=72MHz/(72-1+1)=1MHz=1us;即每过1us,有一次脉冲
ARR=1000-1,从0计数到999,所以就记了1000次
ARR*CNT=1ms3.程序流程:
先配置中断,再配置TIM
3.1配置时基初始化结构体
TIM_TimeBaseInitTypeDef TIM_BaseInitStructure;
RCC_APB1PeriphClockCmd(TIM_CLK,ENABLE);
TIM_BaseInitStructure.TIM_Prescaler=TIM_PRE-1;
TIM_BaseInitStructure.TIM_Period=TIM_ARR-1;
首先肯定要开启时钟线啦,至于开哪条呢?下面我也展示出来了
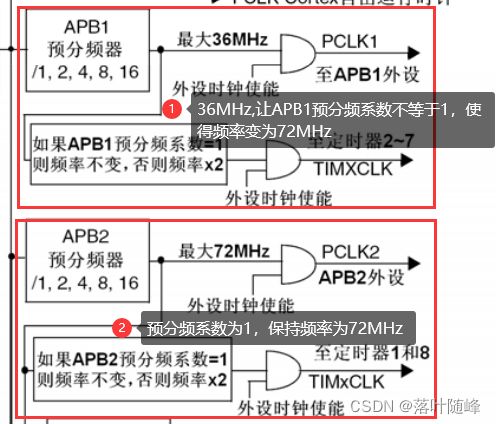
3.1.1时钟线的选择
APB1外设时钟使能寄存器(RCC_APB1ENR)

【28】PWR_EN是电源
APB2 外设时钟使能寄存器(RCC_APB2ENR)

我们可以观察到,APB1往往跟四大通讯方式,基本定时器,通用定时器(TIM2~TIM7)有关
而APB2往往与GPIO,EXTI(AFIO),高级定时器(TIM1,TIM8),注意还有一个USART1
总而言之呢,APB2在我们项目中比较常用的一些模块
3.1.2开启定时器更新中断
TIM_ClearFlag(BASICTIM,TIM_FLAG_Update);//清除更新中断标志位
TIM_ITConfig(BASICTIM,TIM_IT_Update,ENABLE);//TIM_IT_Update,开启更新中断
3.1.3TIM_ClearFlag()和函数TIM_ClearITPendingBit()区别
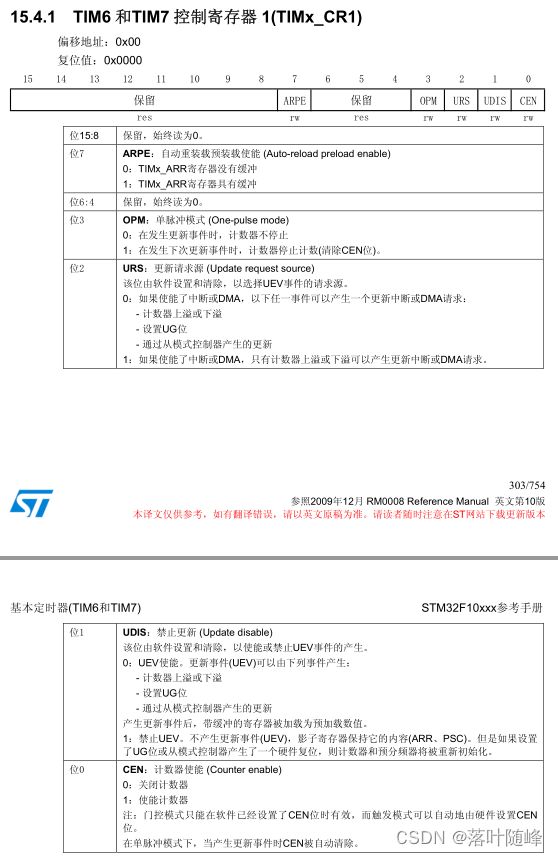
代码中有这样一条,有人会问函数TIM_ClearFlag()和函数TIM_ClearITPendingBit()有什么区别?其实重点在Flag和IT,前者是外设的状态标志,而后者是外设的中断标志。状态标志就是一个外设它有自身的一些标志位(Flag),来表明它处于什么状态,下图就是定时器的状态标记。中断标志就是使能外设的中断后,每次发生一次中断,它会表明发生了什么样的中断,同样中断也有相应的标记。两者分别靠函数TIM_GetFlagStatus()和函数TIM_GetITStatus()来获取
void TIM_ClearFlag(TIM_TypeDef* TIMx, uint16_t TIM_FLAG)
{
/* Check the parameters */
assert_param(IS_TIM_ALL_PERIPH(TIMx));
assert_param(IS_TIM_CLEAR_FLAG(TIM_FLAG));
/* Clear the flags */
TIMx->SR = (uint16_t)~TIM_FLAG;
}
void TIM_ClearITPendingBit(TIM_TypeDef* TIMx, uint16_t TIM_IT)
{
/* Check the parameters */
assert_param(IS_TIM_ALL_PERIPH(TIMx));
assert_param(IS_TIM_IT(TIM_IT));
/* Clear the IT pending Bit */
TIMx->SR = (uint16_t)~TIM_IT;
}
可以看到,两个函数基本一样,只是对TIM_FLAG或TIM_IT操作不同
3.1.4允许更新中断函数及其寄存器DIER
对于允许更新中断函数
void TIM_ITConfig(TIM_TypeDef* TIMx, uint16_t TIM_IT, FunctionalState NewState)
{
/* Check the parameters */
assert_param(IS_TIM_ALL_PERIPH(TIMx));
assert_param(IS_TIM_IT(TIM_IT));
assert_param(IS_FUNCTIONAL_STATE(NewState));
if (NewState != DISABLE)
{
/* Enable the Interrupt sources */
TIMx->DIER |= TIM_IT;
}
else
{
/* Disable the Interrupt sources */
TIMx->DIER &= (uint16_t)~TIM_IT;
}
}

可以简单看到,这个函数就是对中断使能寄存器【DIER】至0或至1操作
3.2配置中断优先级
NVIC_InitStructure.NVIC_IRQChannel=TIM_IRQN;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=NVIC_HIGHT_PRIORITY;
NVIC_InitStructure.NVIC_IRQChannelSubPriority=NVIC_LOW_PRIORITY;
NVIC_InitStructure.NVIC_IRQChannelCmd=ENABLE;
我们可以看一下 NVIC_InitTypeDef 这个结构体里面都有什么
NVIC_IRQChannel
这一个是定义你的中断源,中断源可以在启动文件中找到

NVIC_IRQChannelPreemptionPriority
这一个是设置主优先级的结构体,由于我们是
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
所以范围只能选(0~3)
NVIC_IRQChannelSubPriority
设置从优先级,同理
那下面这句话有什么用呢
NVIC_InitStructure.NVIC_IRQChannelCmd=ENABLE;
我们不妨先来看看这段NVIC_Init的函数
void NVIC_Init(NVIC_InitTypeDef* NVIC_InitStruct)
{
uint32_t tmppriority = 0x00, tmppre = 0x00, tmpsub = 0x0F;
/* Check the parameters */
assert_param(IS_FUNCTIONAL_STATE(NVIC_InitStruct->NVIC_IRQChannelCmd));
assert_param(IS_NVIC_PREEMPTION_PRIORITY(NVIC_InitStruct->NVIC_IRQChannelPreemptionPriority));
assert_param(IS_NVIC_SUB_PRIORITY(NVIC_InitStruct->NVIC_IRQChannelSubPriority));
if (NVIC_InitStruct->NVIC_IRQChannelCmd != DISABLE)
{
/* Compute the Corresponding IRQ Priority --------------------------------*/
tmppriority = (0x700 - ((SCB->AIRCR) & (uint32_t)0x700))>> 0x08;
tmppre = (0x4 - tmppriority);
tmpsub = tmpsub >> tmppriority;
tmppriority = (uint32_t)NVIC_InitStruct->NVIC_IRQChannelPreemptionPriority << tmppre;
tmppriority |= NVIC_InitStruct->NVIC_IRQChannelSubPriority & tmpsub;
tmppriority = tmppriority << 0x04;
NVIC->IP[NVIC_InitStruct->NVIC_IRQChannel] = tmppriority;
/* Enable the Selected IRQ Channels --------------------------------------*/
NVIC->ISER[NVIC_InitStruct->NVIC_IRQChannel >> 0x05] =
(uint32_t)0x01 << (NVIC_InitStruct->NVIC_IRQChannel & (uint8_t)0x1F);
}
else
{
/* Disable the Selected IRQ Channels -------------------------------------*/
NVIC->ICER[NVIC_InitStruct->NVIC_IRQChannel >> 0x05] =
(uint32_t)0x01 << (NVIC_InitStruct->NVIC_IRQChannel & (uint8_t)0x1F);
}
}
NVIC_InitStruct->NVIC_IRQChannelCmd会读取你是否是ENABLE,然后把配置好的主从优先级,中断源写进相关寄存器中
tmppriority = (0x700 - ((SCB->AIRCR) & (uint32_t)0x700))>> 0x08;
tmppre = (0x4 - tmppriority);
tmpsub = tmpsub >> tmppriority;
tmppriority = (uint32_t)NVIC_InitStruct->NVIC_IRQChannelPreemptionPriority << tmppre;
tmppriority |= NVIC_InitStruct->NVIC_IRQChannelSubPriority & tmpsub;
tmppriority = tmppriority << 0x04;
这一段代码,主要是先判断选择了哪一组的中断分组,然后把主从优先级依次写进AIRCR寄存器中,因为AIRCR只有10-8位才是控制优先级的,所以我们需要移位

3.2.1移位
关于移位,我用C写了一小段代码,当作是复习

3.3使能定时器
TIM_Cmd(BASICTIM,ENABLE);//打开定时器void TIM_Cmd(TIM_TypeDef* TIMx, FunctionalState NewState)
{
/* Check the parameters */
assert_param(IS_TIM_ALL_PERIPH(TIMx));
assert_param(IS_FUNCTIONAL_STATE(NewState));
if (NewState != DISABLE)
{
/* Enable the TIM Counter */
TIMx->CR1 |= TIM_CR1_CEN;
}
else
{
/* Disable the TIM Counter */
TIMx->CR1 &= (uint16_t)(~((uint16_t)TIM_CR1_CEN));
}
}
3.4编写中断服务函数
void TIM6_IRQHandler()
{
if(TIM_GetFlagStatus(TIM6,TIM_FLAG_Update)!=RESET)
{
N++;
}
TIM_ClearITPendingBit(TIM6,TIM_IT_Update);
}
3.5Main函数
//对基本定时器初始化
BasicTIM_Init();4.代码示例
基本定时器示例
代码的移植性很高,里面也已经有大量的注释