【Unity】Unity 几何知识、弧度、三角函数、向量运算、点乘、叉乘
文章目录
- 基础几何知识
-
- 角的度量方式
- 角度弧度转换
- 三角函数
- 计算公式
- 常用三角函数值
- 使用方法
- Unity应用
- 向量
-
- 向量加减法
- 向量相减
- 向量相加
- 向量与标量的乘除
- 点乘
- 叉乘
-
- 叉乘获得垂直向量
- 左手规则
- 叉乘计算角度
- 计算360°以内的角(点乘结合叉乘)
- Vector3
基础几何知识
角的度量方式
角的度量方式分为角度(Degree)和弧度(Radian)两种。角度就是将一个圆形切成360份,每一份就是1度角。弧度是当弧长等于圆的半径时即为1弧度。
如图所示:

角度弧度转换
常用换算:
π = 180 度 \ \pi = 180度 π=180度
1 弧 度 = 180 度 / π \ 1弧度 = 180度 / \pi 1弧度=180度/π
1 角 度 = π / 180 度 \ 1角度 = \pi / 180度 1角度=π/180度
角度转弧度:
- 转换公式: 弧 度 = 角 度 数 ∗ π / 180 \ 弧度 = 角度数 * \pi / 180 弧度=角度数∗π/180
- Unity代码:radian = x * Mathf.Deg2Rad;
弧度转角度:
- 转换公式: 角 度 = 弧 度 数 ∗ 180 / π \ 角度 = 弧度数 * 180 / \pi 角度=弧度数∗180/π
- Unity代码:degree = x * Mathf.Rad2Deg;
三角函数
在直角三角形中(下图为例),如果 a 、 b 、 c 、 x \ a、b、c、x a、b、c、x中的两个变量已知则能计算出另外两个变量的值。

计算公式
正弦: s i n ( x ) = a / c \ sin(x) = a / c sin(x)=a/c (对比斜)
余弦: c o s ( x ) = b / c \ cos(x) = b / c cos(x)=b/c (临比斜)
正切: t a n ( x ) = a / b \ tan(x) = a / b tan(x)=a/b (对比临)
余切: c o t ( x ) = b / a \ cot(x) = b / a cot(x)=b/a
正割: s e c ( x ) = c / b \ sec(x) = c / b sec(x)=c/b
余割: c s c ( x ) = c / a \ csc(x) = c / a csc(x)=c/a
反正弦: a r c s i n ( a / c ) = x \ arcsin(a / c) = x arcsin(a/c)=x
反余弦: a r c c o s ( b / c ) = x \ arccos(b / c) = x arccos(b/c)=x
反正切: a r c t a n ( a / b ) = x \ arctan(a / b) = x arctan(a/b)=x
已知一角和一边,求另外两边,用sin、cos、tan。
已知两边,求角,用arcsin、arccos、arctan。
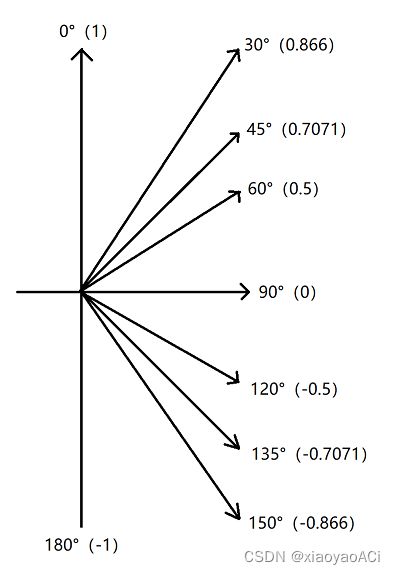
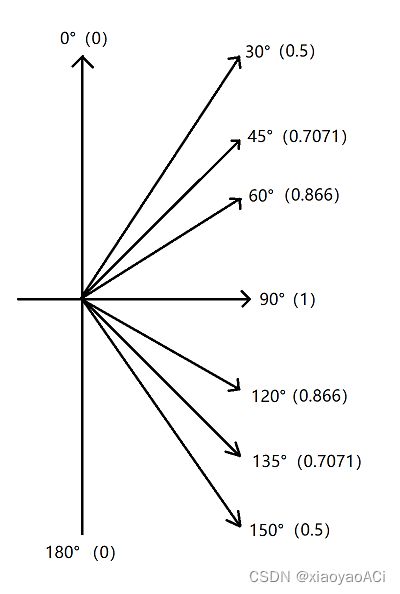
常用三角函数值

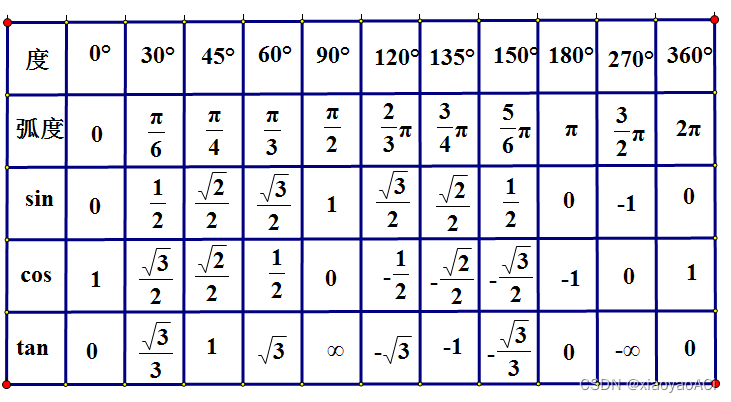
使用方法
已知一个角和一条边,用 s i n 、 c o s 、 t a n \ sin、cos、tan sin、cos、tan 。
已知两条边求角度,用 A r c S i n 、 A r c C o s 、 A r c T a n \ ArcSin、ArcCos、ArcTan ArcSin、ArcCos、ArcTan 。
Unity应用
在代码中调用Mathf.Sin等三角函数方法时传入的参数并不是角度,而是弧度。
比如如果我们想要获取sin30度的值不能这样写:Mathf.Sin(30)。这样是错的。
正确的写法应该是Mathf.Sin(30 * Mathf.Deg2Rad),将角度转为弧度再传参,得到的结果就是0.5了。
下图为官方API的描述。

要求输入的角度是以弧度为单位的,所以要用这些方法时经常要用到角度和弧度的转换。
向量
向量是一个数字列表,表示各个维度上的有向位移。它是一个有大小有方向的物理量。大小就是方向的模长,方向描述了空间中向量的指向。向量可以用来表示物体的位置和方向。
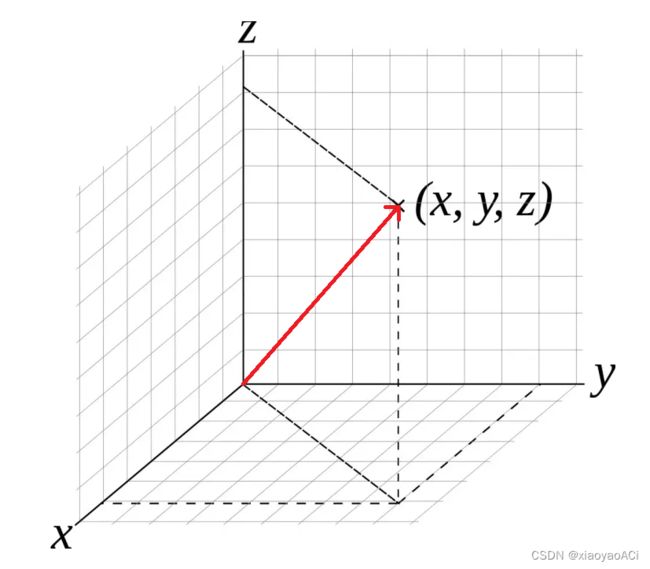
向量的大小:也就是向量的长度(一般称作为 模),向量a的模记为 ∣ a ⃗ ∣ \ | \vec a | ∣a∣ ,若 a ⃗ = ( x , y , z ) \ \vec a = (x, y, z) a=(x,y,z) 则 ∣ a ⃗ ∣ = x 2 + y 2 + z 2 \ | \vec a | = \sqrt {x^2 + y^2 + z^2} ∣a∣=x2+y2+z2 。代码中使用myVector.magnitude来获取向量的大小。
单位向量:即模为1的向量,在Unity中单位向量也就代表了向量的方向。可以记作 a ^ \widehat{a} a 。一个向量的单位向量,可以通过除以它模得到,即 a ^ = a ⃗ ∣ a ⃗ ∣ \widehat{a} = \frac {\vec a} {| \vec a |} a =∣a∣a 。代码中使用myVector.normalized来获取向量的单位向量,也就是向量的方向。
零向量:即模为0的向量,零向量的方向是任意的。
相反向量:长度相等方向相反的向量, a ⃗ \ \vec a a 的相反向量为 − a ⃗ \ -\vec a −a。
平行(共线)向量:方向相同或相反的非零向量,记作 a ⃗ / / b ⃗ \ \vec a // \vec b a//b。
向量加减法
向量的加减就是向量对应分量的加减,类似于物理学中力的正交分解。
向量相减
向量相减等于各分量相减。
[ x 1 , y 1 , z 1 ] − [ x 2 , y 2 , z 2 ] = [ x 1 − x 2 , y 1 − y 2 , z 1 − z 2 ] \ [x1,y1,z1] - [x2,y2,z2] = [x1-x2 , y1-y2 , z1-z2] [x1,y1,z1]−[x2,y2,z2]=[x1−x2,y1−y2,z1−z2]
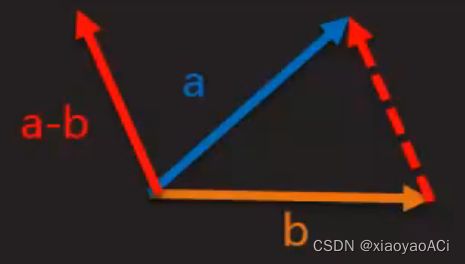
几何意义:向量a与向量b相减,结果理解为以b的终点为起点,以a的终点为终点的向量。方向由b指向a。
注意:我们可以把向量相减理解为a、b终点的连接,但实际上该向量准确起始位置应该是坐标原点。
实际应用:计算两点之间的距离和相对方向。
向量相加
向量相加等于各分量相加。
[ x 1 , y 1 , z 1 ] + [ x 2 , y 2 , z 2 ] = [ x 1 + x 2 , y 1 + y 2 , z 1 + z 2 ] \ [x1,y1,z1] + [x2,y2,z2] = [x1+x2 , y1+y2 , z1+z2] [x1,y1,z1]+[x2,y2,z2]=[x1+x2,y1+y2,z1+z2]
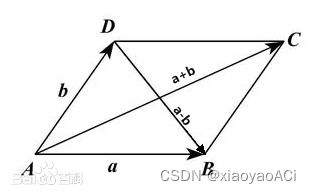
几何意义:如下图,假设空间中有两个向量a和b,a与a’平行且长度相等,b与b’平行且长度相等。a+b就相当于a,b,a’,b’所围成的平行四边形的对角线。
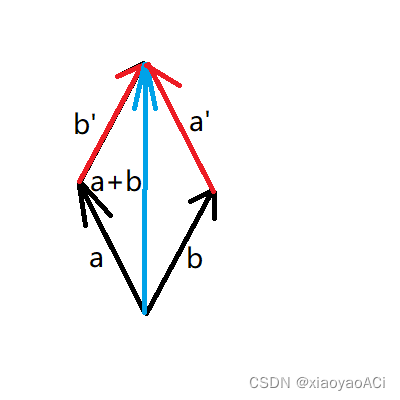
也可以这么说,由向量a的起点出发,沿着a的方向走a的长度,然后沿着b的方向走b的长度,达到的点相当于从a的起点沿着a+b的方向走a+b的长度。
实际应用:物体的移动。
向量与标量的乘除
乘法:该向量的各分量与标量相乘 k [ x , y , z ] = [ x k , y k , z k ] \ k[x, y, z] = [xk, yk, zk] k[x,y,z]=[xk,yk,zk] 。
除法:该向量的各分量与标量相除 [ x , y , z ] / k = [ x / k , y / k , z / k ] \ [x, y, z]/k = [x/k , y/k , z/k] [x,y,z]/k=[x/k,y/k,z/k] 。
几何意义:缩放向量长度。
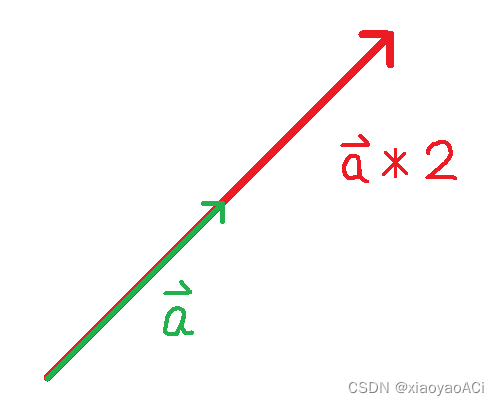
实际应用:加速、减速、放大、缩小。
点乘
点乘又称点积或内积。表示为各分量的乘积和。
[ x 1 , y 1 , z 1 ] ⋅ [ x 2 , y 2 , z 2 ] = x 1 x 2 + y 1 y 2 + z 1 z 2 \ [x1,y1,z1] \cdot [x2,y2,z2] = x1x2+y1y2+z1z2 [x1,y1,z1]⋅[x2,y2,z2]=x1x2+y1y2+z1z2
注意结果不是一个向量,而是一个标量(Scalar),可以是负数。
几何意义: a ⋅ b = ∣ a ∣ ∣ b ∣ cos ( a , b ) \ a \cdot b = |a||b|\cos(a, b) a⋅b=∣a∣∣b∣cos(a,b) 当a、b的模为1时,ab的点乘值为∠ab的cos值,再通过反余弦就可以获得角度。
// 计算点乘值
float dot = Vector3.Dot(a.position.normalized, b.position.normalized);
// 计算夹角
float angle = Mathf.Acos(dot) * Mathf.Rad2Deg;
第一步计算点乘值,第二步计算夹角。
实际应用:计算两向量的夹角。
点乘常用结果:对于标准化后的向量,方向相同,则点乘为1;方向相反,则点乘为-1;互相垂直,则点乘为0。
总结:点乘可以用于计算向量夹角,但只能用于计算内夹角,也就是小于180°的夹角。若想超过180°,则需要与叉乘结合。点乘的结果为单个数值。
叉乘
叉乘又称 “叉积” 或 “外积” ,与点乘结果不同,叉乘结果是一个向量,一个垂直于两个向量所组成平面的向量。模长为两向量模长乘积再乘夹角的正弦值。
公式: [ x 1 , y 1 , z 1 ] × [ x 2 , y 2 , z 2 ] = [ y 1 ∗ z 1 − z 1 ∗ y 2 , z 1 ∗ x 2 − x 1 ∗ z 2 , x 1 ∗ y 2 − y 1 ∗ x 2 ] \ [x1,y1,z1] \times [x2,y2,z2] = [y1*z1 - z1*y2 , z1*x2 - x1*z2 , x1*y2 - y1*x2] [x1,y1,z1]×[x2,y2,z2]=[y1∗z1−z1∗y2,z1∗x2−x1∗z2,x1∗y2−y1∗x2]
代码:Vector3 cross = Vector3.Cross(a.position, b.position);
注意:叉乘不需要加normalized,加不加都不会影响结果。
应用:
- 创建垂直于平面的向量;
- 判断两条向量的相对位置。
叉乘获得垂直向量
-
当 a 到 b 顺时针,则 a x b 朝上。
-
当 a 到 b 逆时针,则 a x b 朝下。
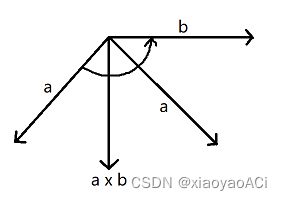
也可以这样理解:当a、b顺时针夹角小于180时, a x b 朝上;当a、b顺时针夹角大于180时, a x b 朝下。
代码判断:叉乘结果 y > 0 ,则朝上,则小于180°;叉乘结果 y < 0 ,则朝下,则大于180°;
左手规则
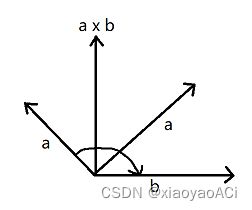
a、b向量叉乘获得的垂直向量遵循左手规则,以下图为例:
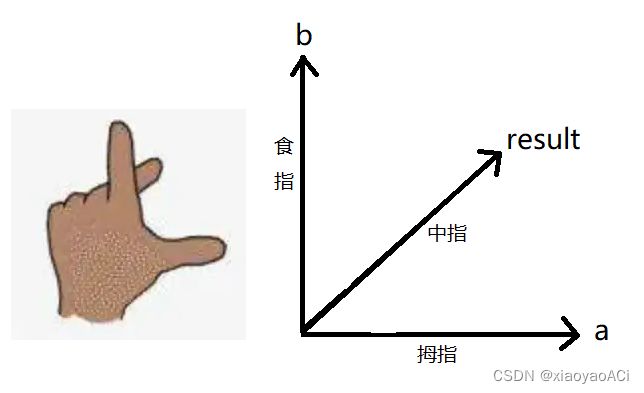
以上图手势为标准,垂直于拇指a和食指b形成的平面的向量result就是a、b叉乘的结果。
叉乘计算角度
叉乘也可以用来计算角度,但只能计算0° ~ 90°。
// 计算叉乘结果,叉乘不需要加normalized,但加了也不会有影响
Vector3 cross = Vector3.Cross(a.position, b.position);
// 用叉乘结果换算角度
float angle = Mathf.Asin(cross.magnitude) * Mathf.Rad2Deg;
叉乘常用结果:
计算360°以内的角(点乘结合叉乘)
点乘结合叉乘,可以计算出360°以内的角。

// 先用点乘计算角度(180°以内)
float dot = Vector3.Dot(a.position.normalized, b.position.normalized);
float angleX = Mathf.Acos(dot) * Mathf.Rad2Deg;
// 再用叉乘后的y值确定方向
Vector3 cross = Vector3.Cross(a.position, b.position);
if (cross.y < 0)
{
angleX = 360 - angleX;
}
先用点乘计算角度(180°以内),再用叉乘后的 y 值确定方向,得数 angleX 为 a 顺时针到 b 的角度。
Vector3
Unity中通常用Vector3类来表示向量,该类的使用方法可以参考我的另外一篇文章:【Unity】Unity常用类:向量Vector3、四元数Quaternion
更多内容请查看总目录【Unity】Unity学习笔记目录整理