55_ZYNQ7020开发板SDK_下使用Free RTOS
一、实现Vivado工程为"freeos_test"
本节开始搭建Free RTOS实时操作系统运行环境,本实验以FreeRTOS Hello World举例,实现两个LED灯以不同的间隔持续闪烁。
本实验基于“双核AMP的使用”工程,硬件环境不需要修改。
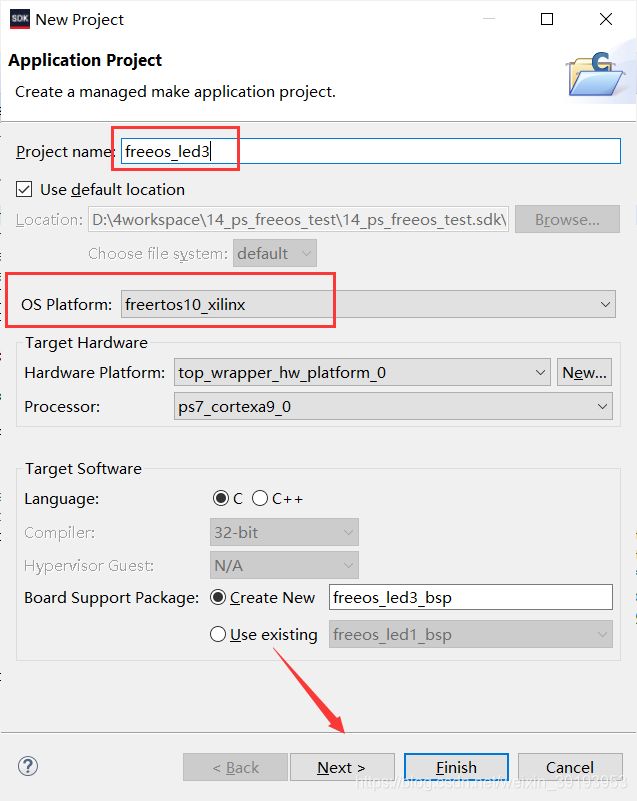
二、新建工程,OS Platform选择freetos901_xilinx
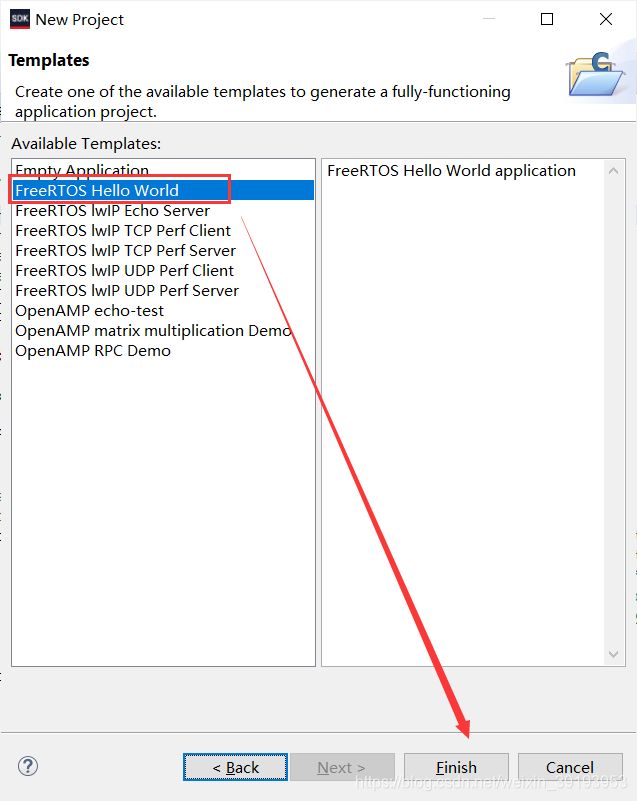
三、选择FreeRTOS Hello world举例
四、生成后如下
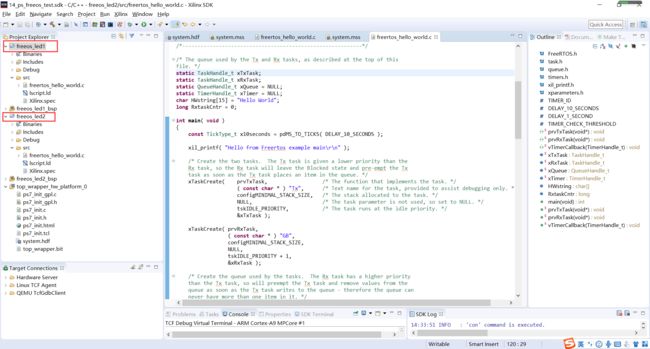
五、查看main.c函数,Hello World例子中建立了两个任务,发送任务和接收任务,接收任务得到优先级高于发送任务。并且创建队列,由发送任务向队列发送数据,接收任务从队列中读取数据并打印。例子中设置了timer,但在本实验中删除了timer,让发送和接收任务一直工作。

生成的代码
freertos_hello_world.c
/*
Copyright (C) 2017 Amazon.com, Inc. or its affiliates. All Rights Reserved.
Copyright (C) 2012 - 2018 Xilinx, Inc. All Rights Reserved.
Permission is hereby granted, free of charge, to any person obtaining a copy of
this software and associated documentation files (the "Software"), to deal in
the Software without restriction, including without limitation the rights to
use, copy, modify, merge, publish, distribute, sublicense, and/or sell copies of
the Software, and to permit persons to whom the Software is furnished to do so,
subject to the following conditions:
The above copyright notice and this permission notice shall be included in all
copies or substantial portions of the Software. If you wish to use our Amazon
FreeRTOS name, please do so in a fair use way that does not cause confusion.
THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY, FITNESS
FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE AUTHORS OR
COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER LIABILITY, WHETHER
IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM, OUT OF OR IN
CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE SOFTWARE.
http://www.FreeRTOS.org
http://aws.amazon.com/freertos
***************************************************************************
* *
* Having a problem? Start by reading the FAQ "My application does *
* not run, what could be wrong?". Have you defined configASSERT()? *
* *
* http://www.FreeRTOS.org/FAQHelp.html *
* *
***************************************************************************
***************************************************************************
* *
* FreeRTOS provides completely free yet professionally developed, *
* robust, strictly quality controlled, supported, and cross *
* platform software that is more than just the market leader, it *
* is the industry's de facto standard. *
* *
* Help yourself get started quickly while simultaneously helping *
* to support the FreeRTOS project by purchasing a FreeRTOS *
* tutorial book, reference manual, or both: *
* http://www.FreeRTOS.org/Documentation *
* *
***************************************************************************
***************************************************************************
* *
* Investing in training allows your team to be as productive as *
* possible as early as possible, lowering your overall development *
* cost, and enabling you to bring a more robust product to market *
* earlier than would otherwise be possible. Richard Barry is both *
* the architect and key author of FreeRTOS, and so also the world's *
* leading authority on what is the world's most popular real time *
* kernel for deeply embedded MCU designs. Obtaining your training *
* from Richard ensures your team will gain directly from his in-depth *
* product knowledge and years of usage experience. Contact Real Time *
* Engineers Ltd to enquire about the FreeRTOS Masterclass, presented *
* by Richard Barry: http://www.FreeRTOS.org/contact
* *
***************************************************************************
***************************************************************************
* *
* You are receiving this top quality software for free. Please play *
* fair and reciprocate by reporting any suspected issues and *
* participating in the community forum: *
* http://www.FreeRTOS.org/support *
* *
* Thank you! *
* *
***************************************************************************
http://www.FreeRTOS.org - Documentation, books, training, latest versions,
license and Real Time Engineers Ltd. contact details.
http://www.FreeRTOS.org/plus - A selection of FreeRTOS ecosystem products,
including FreeRTOS+Trace - an indispensable productivity tool, a DOS
compatible FAT file system, and our tiny thread aware UDP/IP stack.
http://www.FreeRTOS.org/labs - Where new FreeRTOS products go to incubate.
Come and try FreeRTOS+TCP, our new open source TCP/IP stack for FreeRTOS.
http://www.OpenRTOS.com - Real Time Engineers ltd license FreeRTOS to High
Integrity Systems ltd. to sell under the OpenRTOS brand. Low cost OpenRTOS
licenses offer ticketed support, indemnification and commercial middleware.
http://www.SafeRTOS.com - High Integrity Systems also provide a safety
engineered and independently SIL3 certified version for use in safety and
mission critical applications that require provable dependability.
1 tab == 4 spaces!
*/
/* FreeRTOS includes. */
#include "FreeRTOS.h"
#include "task.h"
#include "queue.h"
#include "timers.h"
/* Xilinx includes. */
#include "xil_printf.h"
#include "xparameters.h"
#define TIMER_ID 1
#define DELAY_10_SECONDS 10000UL
#define DELAY_1_SECOND 1000UL
#define TIMER_CHECK_THRESHOLD 9
/*-----------------------------------------------------------*/
/* The Tx and Rx tasks as described at the top of this file. */
static void prvTxTask( void *pvParameters );
static void prvRxTask( void *pvParameters );
static void vTimerCallback( TimerHandle_t pxTimer );
/*-----------------------------------------------------------*/
/* The queue used by the Tx and Rx tasks, as described at the top of this
file. */
static TaskHandle_t xTxTask;
static TaskHandle_t xRxTask;
static QueueHandle_t xQueue = NULL;
static TimerHandle_t xTimer = NULL;
char HWstring[15] = "Hello World";
long RxtaskCntr = 0;
int main( void )
{
const TickType_t x10seconds = pdMS_TO_TICKS( DELAY_10_SECONDS );
xil_printf( "Hello from Freertos example main\r\n" );
/* Create the two tasks. The Tx task is given a lower priority than the
Rx task, so the Rx task will leave the Blocked state and pre-empt the Tx
task as soon as the Tx task places an item in the queue. */
xTaskCreate( prvTxTask, /* The function that implements the task. */
( const char * ) "Tx", /* Text name for the task, provided to assist debugging only. */
configMINIMAL_STACK_SIZE, /* The stack allocated to the task. */
NULL, /* The task parameter is not used, so set to NULL. */
tskIDLE_PRIORITY, /* The task runs at the idle priority. */
&xTxTask );
xTaskCreate( prvRxTask,
( const char * ) "GB",
configMINIMAL_STACK_SIZE,
NULL,
tskIDLE_PRIORITY + 1,
&xRxTask );
/* Create the queue used by the tasks. The Rx task has a higher priority
than the Tx task, so will preempt the Tx task and remove values from the
queue as soon as the Tx task writes to the queue - therefore the queue can
never have more than one item in it. */
xQueue = xQueueCreate( 1, /* There is only one space in the queue. */
sizeof( HWstring ) ); /* Each space in the queue is large enough to hold a uint32_t. */
/* Check the queue was created. */
configASSERT( xQueue );
/* Create a timer with a timer expiry of 10 seconds. The timer would expire
after 10 seconds and the timer call back would get called. In the timer call back
checks are done to ensure that the tasks have been running properly till then.
The tasks are deleted in the timer call back and a message is printed to convey that
the example has run successfully.
The timer expiry is set to 10 seconds and the timer set to not auto reload. */
xTimer = xTimerCreate( (const char *) "Timer",
x10seconds,
pdFALSE,
(void *) TIMER_ID,
vTimerCallback);
/* Check the timer was created. */
configASSERT( xTimer );
/* start the timer with a block time of 0 ticks. This means as soon
as the schedule starts the timer will start running and will expire after
10 seconds */
xTimerStart( xTimer, 0 );
/* Start the tasks and timer running. */
vTaskStartScheduler();
/* If all is well, the scheduler will now be running, and the following line
will never be reached. If the following line does execute, then there was
insufficient FreeRTOS heap memory available for the idle and/or timer tasks
to be created. See the memory management section on the FreeRTOS web site
for more details. */
for( ;; );
}
/*-----------------------------------------------------------*/
static void prvTxTask( void *pvParameters )
{
const TickType_t x1second = pdMS_TO_TICKS( DELAY_1_SECOND );
for( ;; )
{
/* Delay for 1 second. */
vTaskDelay( x1second );
/* Send the next value on the queue. The queue should always be
empty at this point so a block time of 0 is used. */
xQueueSend( xQueue, /* The queue being written to. */
HWstring, /* The address of the data being sent. */
0UL ); /* The block time. */
}
}
/*-----------------------------------------------------------*/
static void prvRxTask( void *pvParameters )
{
char Recdstring[15] = "";
for( ;; )
{
/* Block to wait for data arriving on the queue. */
xQueueReceive( xQueue, /* The queue being read. */
Recdstring, /* Data is read into this address. */
portMAX_DELAY ); /* Wait without a timeout for data. */
/* Print the received data. */
xil_printf( "Rx task received string from Tx task: %s\r\n", Recdstring );
RxtaskCntr++;
}
}
/*-----------------------------------------------------------*/
static void vTimerCallback( TimerHandle_t pxTimer )
{
long lTimerId;
configASSERT( pxTimer );
lTimerId = ( long ) pvTimerGetTimerID( pxTimer );
if (lTimerId != TIMER_ID) {
xil_printf("FreeRTOS Hello World Example FAILED");
}
/* If the RxtaskCntr is updated every time the Rx task is called. The
Rx task is called every time the Tx task sends a message. The Tx task
sends a message every 1 second.
The timer expires after 10 seconds. We expect the RxtaskCntr to at least
have a value of 9 (TIMER_CHECK_THRESHOLD) when the timer expires. */
if (RxtaskCntr >= TIMER_CHECK_THRESHOLD) {
xil_printf("FreeRTOS Hello World Example PASSED");
} else {
xil_printf("FreeRTOS Hello World Example FAILED");
}
vTaskDelete( xRxTask );
vTaskDelete( xTxTask );
}
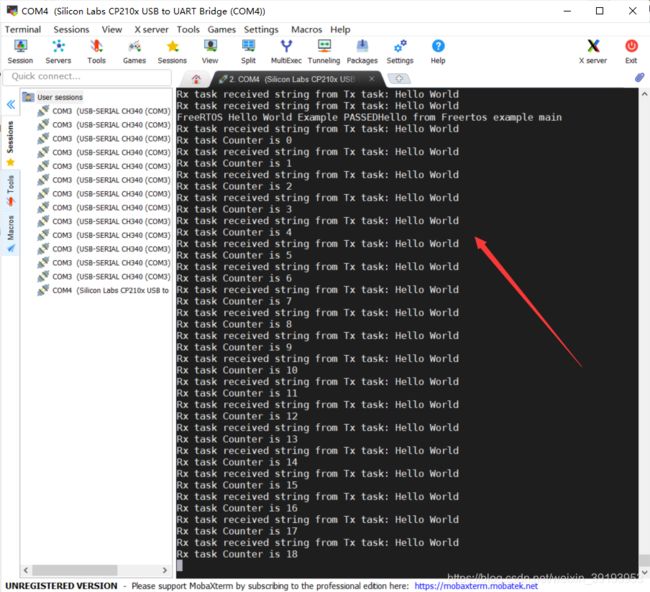
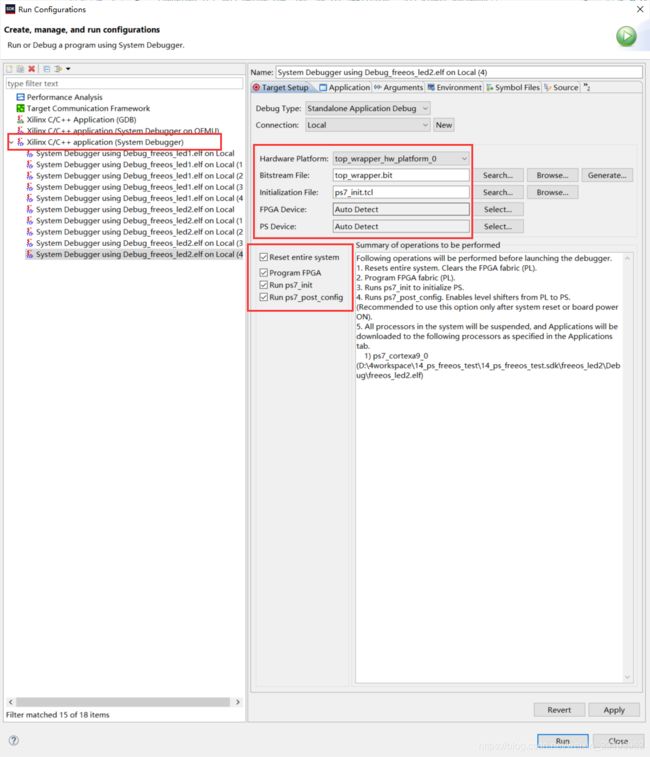
六、板上测试
选择如下,点击run
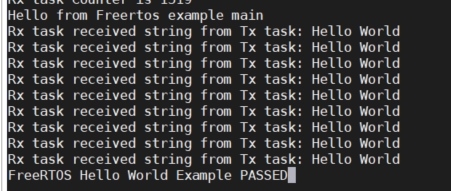
串口:com4,波特率115200,打印结果如下
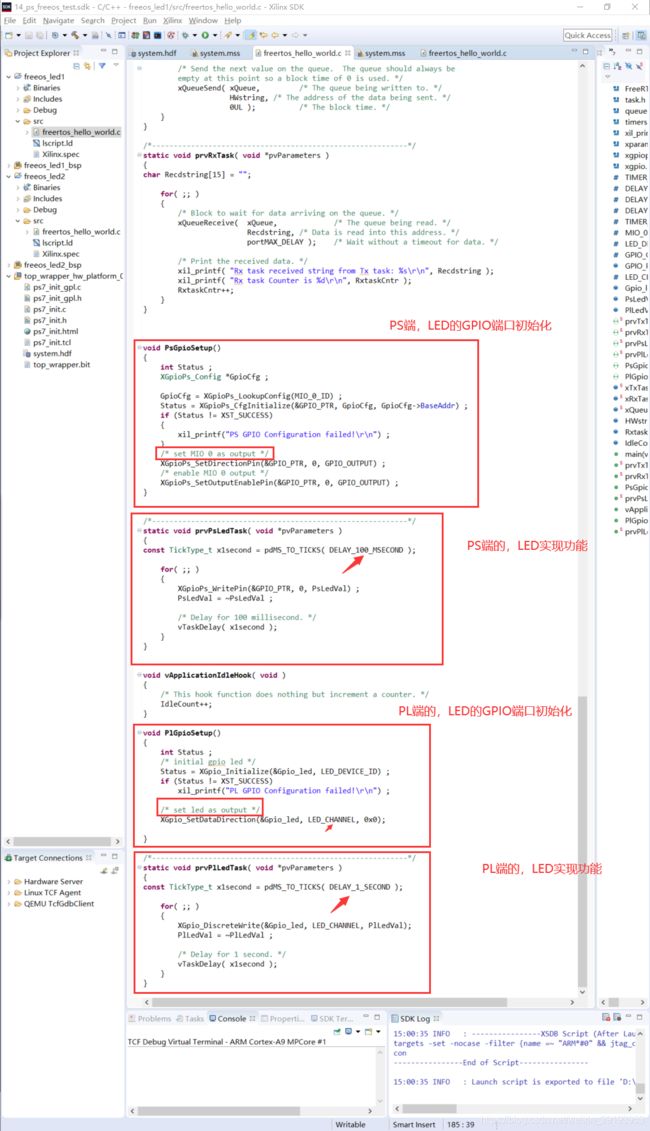
七、添加PS端与PL端的LED灯,新建工程freeos_led1,如下

八、添加函数,man.c函数中添加、功能函数实现

main函数中实现功能

freertos_hello_world.c
/*
FreeRTOS V8.2.1 - Copyright (C) 2015 Real Time Engineers Ltd.
All rights reserved
VISIT http://www.FreeRTOS.org TO ENSURE YOU ARE USING THE LATEST VERSION.
This file is part of the FreeRTOS distribution.
FreeRTOS is free software; you can redistribute it and/or modify it under
the terms of the GNU General Public License (version 2) as published by the
Free Software Foundation >>!AND MODIFIED BY!<< the FreeRTOS exception.
>>! NOTE: The modification to the GPL is included to allow you to !<<
>>! distribute a combined work that includes FreeRTOS without being !<<
>>! obliged to provide the source code for proprietary components !<<
>>! outside of the FreeRTOS kernel. !<<
FreeRTOS is distributed in the hope that it will be useful, but WITHOUT ANY
WARRANTY; without even the implied warranty of MERCHANTABILITY or FITNESS
FOR A PARTICULAR PURPOSE. Full license text is available on the following
link: http://www.freertos.org/a00114.html
1 tab == 4 spaces!
***************************************************************************
* *
* Having a problem? Start by reading the FAQ "My application does *
* not run, what could be wrong?". Have you defined configASSERT()? *
* *
* http://www.FreeRTOS.org/FAQHelp.html *
* *
***************************************************************************
***************************************************************************
* *
* FreeRTOS provides completely free yet professionally developed, *
* robust, strictly quality controlled, supported, and cross *
* platform software that is more than just the market leader, it *
* is the industry's de facto standard. *
* *
* Help yourself get started quickly while simultaneously helping *
* to support the FreeRTOS project by purchasing a FreeRTOS *
* tutorial book, reference manual, or both: *
* http://www.FreeRTOS.org/Documentation *
* *
***************************************************************************
***************************************************************************
* *
* Investing in training allows your team to be as productive as *
* possible as early as possible, lowering your overall development *
* cost, and enabling you to bring a more robust product to market *
* earlier than would otherwise be possible. Richard Barry is both *
* the architect and key author of FreeRTOS, and so also the world's *
* leading authority on what is the world's most popular real time *
* kernel for deeply embedded MCU designs. Obtaining your training *
* from Richard ensures your team will gain directly from his in-depth *
* product knowledge and years of usage experience. Contact Real Time *
* Engineers Ltd to enquire about the FreeRTOS Masterclass, presented *
* by Richard Barry: http://www.FreeRTOS.org/contact
* *
***************************************************************************
***************************************************************************
* *
* You are receiving this top quality software for free. Please play *
* fair and reciprocate by reporting any suspected issues and *
* participating in the community forum: *
* http://www.FreeRTOS.org/support *
* *
* Thank you! *
* *
***************************************************************************
http://www.FreeRTOS.org - Documentation, books, training, latest versions,
license and Real Time Engineers Ltd. contact details.
http://www.FreeRTOS.org/plus - A selection of FreeRTOS ecosystem products,
including FreeRTOS+Trace - an indispensable productivity tool, a DOS
compatible FAT file system, and our tiny thread aware UDP/IP stack.
http://www.FreeRTOS.org/labs - Where new FreeRTOS products go to incubate.
Come and try FreeRTOS+TCP, our new open source TCP/IP stack for FreeRTOS.
http://www.OpenRTOS.com - Real Time Engineers ltd license FreeRTOS to High
Integrity Systems ltd. to sell under the OpenRTOS brand. Low cost OpenRTOS
licenses offer ticketed support, indemnification and commercial middleware.
http://www.SafeRTOS.com - High Integrity Systems also provide a safety
engineered and independently SIL3 certified version for use in safety and
mission critical applications that require provable dependability.
1 tab == 4 spaces!
*/
/* FreeRTOS includes. */
#include "FreeRTOS.h"
#include "task.h"
#include "queue.h"
#include "timers.h"
/* Xilinx includes. */
#include "xil_printf.h"
#include "xparameters.h"
#include "xgpiops.h"
#include "xgpio.h"
#define TIMER_ID 1
#define DELAY_10_SECONDS 10000UL
#define DELAY_1_SECOND 1000UL
#define DELAY_100_MSECOND 100UL
#define TIMER_CHECK_THRESHOLD 9
#define MIO_0_ID XPAR_PS7_GPIO_0_DEVICE_ID
#define LED_DEVICE_ID XPAR_AXI_GPIO_0_DEVICE_ID
#define GPIO_OUTPUT 1
XGpioPs GPIO_PTR ;
#define LED_CHANNEL 1
XGpio Gpio_led ;
unsigned int PsLedVal = 0 ;
unsigned int PlLedVal = 0x0 ;
/*-----------------------------------------------------------*/
/* The Tx and Rx tasks as described at the top of this file. */
static void prvTxTask( void *pvParameters );
static void prvRxTask( void *pvParameters );
static void prvPsLedTask( void *pvParameters );
static void prvPlLedTask( void *pvParameters ) ;
/*-----------------------------------------------------------*/
void PsGpioSetup() ;
void PlGpioSetup() ;
/* The queue used by the Tx and Rx tasks, as described at the top of this
file. */
static TaskHandle_t xTxTask;
static TaskHandle_t xRxTask;
static QueueHandle_t xQueue = NULL;
char HWstring[15] = "Hello World";
long RxtaskCntr = 0;
unsigned long IdleCount = 0UL ;
int main( void )
{
xil_printf( "Hello from Freertos example main\r\n" );
PsGpioSetup() ;
PlGpioSetup() ;
xTaskCreate( prvTxTask, /* The function that implements the task. */
( const char * ) "Tx", /* Text name for the task, provided to assist debugging only. */
configMINIMAL_STACK_SIZE, /* The stack allocated to the task. */
NULL, /* The task parameter is not used, so set to NULL. */
tskIDLE_PRIORITY, /* The task runs at the idle priority. */
&xTxTask );
xTaskCreate( prvRxTask,
( const char * ) "GB",
configMINIMAL_STACK_SIZE,
NULL,
tskIDLE_PRIORITY + 1,
&xRxTask );
xTaskCreate( prvPsLedTask,
( const char * ) "Ps Led",
configMINIMAL_STACK_SIZE,
NULL,
tskIDLE_PRIORITY + 1,
NULL);
xTaskCreate( prvPlLedTask,
( const char * ) "PL Led",
configMINIMAL_STACK_SIZE,
NULL,
tskIDLE_PRIORITY + 1,
NULL);
/* Create the queue used by the tasks. The Rx task has a higher priority
than the Tx task, so will preempt the Tx task and remove values from the
queue as soon as the Tx task writes to the queue - therefore the queue can
never have more than one item in it. */
xQueue = xQueueCreate( 1, /* There is only one space in the queue. */
sizeof( HWstring ) ); /* Each space in the queue is large enough to hold a uint32_t. */
/* Check the queue was created. */
configASSERT( xQueue );
/* Start the tasks and timer running. */
vTaskStartScheduler();
/* If all is well, the scheduler will now be running, and the following line
will never be reached. If the following line does execute, then there was
insufficient FreeRTOS heap memory available for the idle and/or timer tasks
to be created. See the memory management section on the FreeRTOS web site
for more details. */
for( ;; );
}
/*-----------------------------------------------------------*/
static void prvTxTask( void *pvParameters )
{
const TickType_t x1second = pdMS_TO_TICKS( DELAY_1_SECOND );
for( ;; )
{
/* Delay for 1 second. */
vTaskDelay( x1second );
/* Send the next value on the queue. The queue should always be
empty at this point so a block time of 0 is used. */
xQueueSend( xQueue, /* The queue being written to. */
HWstring, /* The address of the data being sent. */
0UL ); /* The block time. */
}
}
/*-----------------------------------------------------------*/
static void prvRxTask( void *pvParameters )
{
char Recdstring[15] = "";
for( ;; )
{
/* Block to wait for data arriving on the queue. */
xQueueReceive( xQueue, /* The queue being read. */
Recdstring, /* Data is read into this address. */
portMAX_DELAY ); /* Wait without a timeout for data. */
/* Print the received data. */
xil_printf( "Rx task received string from Tx task: %s\r\n", Recdstring );
xil_printf( "Rx task Counter is %d\r\n", RxtaskCntr );
RxtaskCntr++;
}
}
void PsGpioSetup()
{
int Status ;
XGpioPs_Config *GpioCfg ;
GpioCfg = XGpioPs_LookupConfig(MIO_0_ID) ;
Status = XGpioPs_CfgInitialize(&GPIO_PTR, GpioCfg, GpioCfg->BaseAddr) ;
if (Status != XST_SUCCESS)
{
xil_printf("PS GPIO Configuration failed!\r\n") ;
}
/* set MIO 0 as output */
XGpioPs_SetDirectionPin(&GPIO_PTR, 0, GPIO_OUTPUT) ;
/* enable MIO 0 output */
XGpioPs_SetOutputEnablePin(&GPIO_PTR, 0, GPIO_OUTPUT) ;
}
/*-----------------------------------------------------------*/
static void prvPsLedTask( void *pvParameters )
{
const TickType_t x1second = pdMS_TO_TICKS( DELAY_100_MSECOND );
for( ;; )
{
XGpioPs_WritePin(&GPIO_PTR, 0, PsLedVal) ;
PsLedVal = ~PsLedVal ;
/* Delay for 100 millisecond. */
vTaskDelay( x1second );
}
}
void vApplicationIdleHook( void )
{
/* This hook function does nothing but increment a counter. */
IdleCount++;
}
void PlGpioSetup()
{
int Status ;
/* initial gpio led */
Status = XGpio_Initialize(&Gpio_led, LED_DEVICE_ID) ;
if (Status != XST_SUCCESS)
xil_printf("PL GPIO Configuration failed!\r\n") ;
/* set led as output */
XGpio_SetDataDirection(&Gpio_led, LED_CHANNEL, 0x0);
}
/*-----------------------------------------------------------*/
static void prvPlLedTask( void *pvParameters )
{
const TickType_t x1second = pdMS_TO_TICKS( DELAY_1_SECOND );
for( ;; )
{
XGpio_DiscreteWrite(&Gpio_led, LED_CHANNEL, PlLedVal);
PlLedVal = ~PlLedVal ;
/* Delay for 1 second. */
vTaskDelay( x1second );
}
}
九、实现功能
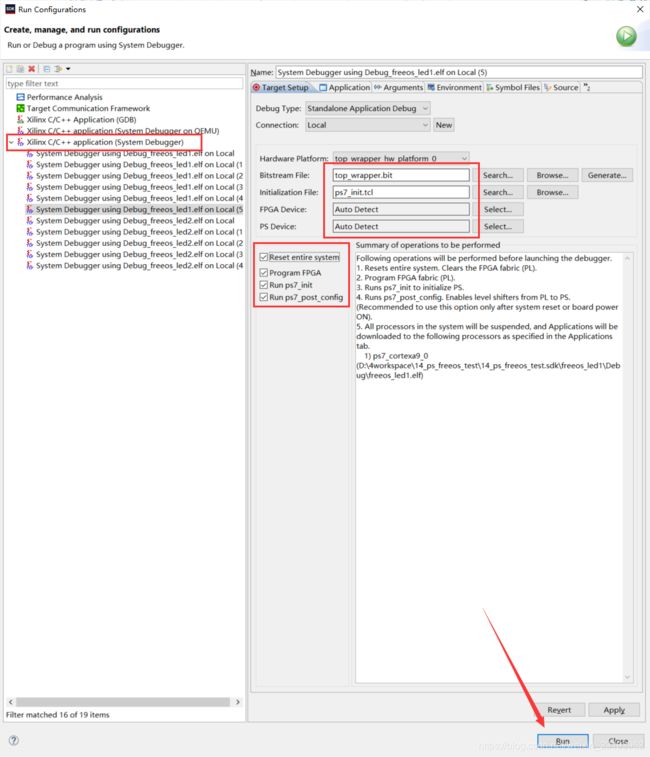
十、现象