从零开始搭二维激光SLAM --- 使用PCL进行雷达的消息类型转换
接下来的几篇文章,我将带大家使用PCL的ICP算法搭建出一个最简单的激光里程计,将涉及到PCL,TF,TF2等函数库,不会用不要紧,我将带着大家一步一步地学习。
由于我想搭的第一个激光里程计是通过ICP算法来实现,而ICP算法已经在PCL中实现好了,所以我们首先来看如何在ROS中引入PCL,并进行使用。
1 PCL
PCL(Point Cloud Library)作为我们接触的第一个外部库,可见其重要性。
PCL里实现了大量的处理点云相关的功能,实现了大量点云相关的通用算法和高效数据结构,涉及到点云获取、滤波、分割、配准、检索、特征提取、识别、追踪、曲面重建、可视化等。
我在这里不对PCL进行过多的介绍,希望读者朋友可以自己去PCL的官网,查看其能够实现的功能。
接下来,我将介绍如何在ROS中使用PCL。
2 在ros中使用PCL
首先,我将带大家从头新建一下lesson2这个包,以展示使用PCL需要的依赖以及需要更改哪些文件。
读者可以跟着我的步骤自己生成一下这个包,也可以直接更新到最新的提交,代码已经提交在github上了。
如果不知道github的地址的朋友, 请在我的公众号: 从零开始搭激光SLAM 中回复 开源地址 获得。
推荐使用 git clone 的方式进行下载, 因为代码是正处于更新状态的, git clone 下载的代码可以使用 git pull 很方便地进行更新.
2.1 新生成包
通过如下命令生成一个新的包,起名为lesson2。可见,需要的依赖有roscpp 、sensor_msgs 、pcl_ros 以及 pcl_conversions 。
cd ~/catkin_ws/src/Creating-2D-laser-slam-from-scratch
catkin_create_pkg lesson2 pcl_conversions pcl_ros roscpp sensor_msgs
roscpp以及sensor_msgs在之前的文章说过了,roscpp是c++的依赖,sensor_msgs是雷达数据的消息类型的依赖。
pcl_conversions 以及 pcl_ros 是ROS官方为了在ROS中方便的使用PCL而写的包。
pcl_conversions 包含了一些方法,实现了 ROS的消息类型 与 PCL的消息类型 的转换。
pcl_ros 定义了一些其他的功能,如在ROS中使用标准的Publisher直接发布PCL的数据格式、将PCL的点云根据tf进行坐标变换、实现了一些常用的功能接口,使得可以直接在ROS中调用PCL的函数,例如进行体素滤波等等。
这两个依赖包的具体讲解请看我为了学习pcl_ros而写的另一篇博客。
https://blog.csdn.net/tiancailx/article/details/110816649
2.2 修改CMakeLists.txt
需要在CMakeLists.txt额外添加下面语句,代表我们需要依赖PCL。
find_package(PCL REQUIRED QUIET)
include_directories(
include
${catkin_INCLUDE_DIRS}
${PCL_INCLUDE_DIRS}
)
2.3 修改Package.xml
需要额外添加如下两句话,代表依赖PCL。
<build_depend>libpcl-all-devbuild_depend>
<exec_depend>libpcl-allexec_depend>
3 工程代码
上面部分讲了在ROS中使用PCL需要的依赖项,以及如何更改CMakeLists.txt与Package.xml。
这部分讲实际的代码。
3.1 头文件
在 lesson2/include/lesson2/ 文件夹下 生成头文件, 并取名为 scan_to_pointclod2_converter.h.
将如下内容复制进去
#ifndef LESSON2_SCAN_TO_POINTCLOUD2_CONVERTER_H
#define LESSON2_SCAN_TO_POINTCLOUD2_CONVERTER_H
// ros
#include 代码的内容很简单,简单说明一下
首先,引入了3种头文件,分别是ros的,pcl_ros的(ros与PCL数据类型转换函数),以及PCL的基础数据类型。
其中我用了PCL的2个数据结构,分别为
- 数据点: pcl::PointXYZ
- 点云的数据结构: pcl::PointCloud< pcl::PointXYZ>
并将他们重命名,以减少代码量。
3.2 源文件
在 lesson2/src 文件夹下 生成源文件, 并取名为 scan_to_pointclod2_converter.cc
将如下内容复制进去
#include "lesson2/scan_to_pointclod2_converter.h"
#include 到 sensor_msgs/PointCloud2 的数据类型的转换
pointcloud2_publisher_ = node_handle_.advertise<PointCloudT>(
"pointcloud2_converted", 1, this);
// 无效点的值设置为nan
invalid_point_.x = std::numeric_limits<float>::quiet_NaN();
invalid_point_.y = std::numeric_limits<float>::quiet_NaN();
invalid_point_.z = std::numeric_limits<float>::quiet_NaN();
}
ScanToPointCloud2Converter::~ScanToPointCloud2Converter()
{
ROS_INFO("Destroying ScanToPointCloud2Converter");
}
void ScanToPointCloud2Converter::ScanCallback(const sensor_msgs::LaserScan::ConstPtr &scan_msg)
{
// 声明一个 pcl::PointCloud 类型的指针
PointCloudT::Ptr cloud_msg = boost::shared_ptr<PointCloudT>(new PointCloudT());
// 对容器进行初始化
cloud_msg->points.resize(scan_msg->ranges.size());
for (unsigned int i = 0; i < scan_msg->ranges.size(); ++i)
{
// 首先声明一个 cloud_msg第i个点的 引用
PointT & point_tmp = cloud_msg->points[i];
// 获取scan的第i个点的距离值
float range = scan_msg->ranges[i];
// 将 inf 与 nan 点 设置为无效点
if (!std::isfinite(range))
{
// std::cout << " " << i << " " << scan_msg->ranges[i];
point_tmp = invalid_point_;
continue;
}
// 有些雷达驱动会将无效点设置成 range_max+1
// 所以要根据雷达的range_min与range_max进行有效值的判断
if (range > scan_msg->range_min && range < scan_msg->range_max)
{
// 获取第i个点对应的角度
float angle = scan_msg->angle_min + i * scan_msg->angle_increment;
// 获取第i个点在笛卡尔坐标系下的坐标
point_tmp.x = range * cos(angle);
point_tmp.y = range * sin(angle);
point_tmp.z = 0.0;
}
else
// 无效点
point_tmp = invalid_point_;
}
cloud_msg->width = scan_msg->ranges.size();
cloud_msg->height = 1;
cloud_msg->is_dense = false; // contains nans
// 将scan_msg的消息头 赋值到 PointCloudT的消息头
pcl_conversions::toPCL(scan_msg->header, cloud_msg->header);
// 由于ros中自动做了 pcl::PointCloud 到 sensor_msgs/PointCloud2 的数据类型的转换
// 所以这里直接发布 pcl::PointCloud 即可
pointcloud2_publisher_.publish(cloud_msg);
}
int main(int argc, char **argv)
{
ros::init(argc, argv, "lesson2_scan_to_cloud_converter_node"); // 节点的名字
ScanToPointCloud2Converter scan_to_cloud_converter;
ros::spin(); // 程序执行到此处时开始进行等待,每次订阅的消息到来都会执行一次ScanCallback()
return 0;
}
接下来我将对重点语句进行说明
3.2.1
pointcloud2_publisher_ = node_handle_.advertise<PointCloudT>(
"pointcloud2_converted", 1, this);
构造函数中,我们将pointcloud2_publisher_初始化成了一个发布PointCloudT,也就是pcl::PointCloud,数据类型的的发布器。
有没有对这个很奇怪,在ros的发布器还可以发布非ros消息类型的消息?
答案:是因为ros官方在pcl_ros中做了Publisher的多态(和函数重载差不多,只不过多态形容的是类)。
使得ros的标准Publisher可以接收pcl::PointCloud< T>类型的消息,并自动转换成sensor_msgs::PointCloud2的消息类型,再发布出去。
也就是说,我们想要发布sensor_msgs::PointCloud2类型的数据,在我们只有pcl::PointCloud格式的数据时,不需要做转换,可以直接发布pcl::PointCloud格式,ros会自动帮我们转换,并发布sensor_msgs::PointCloud2类型的数据。
这块具体的实现代码请参看我的另一篇博客
perception_pcl理解 — pcl_conversions 与 pcl_ros
3.2.2
// 无效点的值设置为nan
invalid_point_.x = std::numeric_limits<float>::quiet_NaN();
invalid_point_.y = std::numeric_limits<float>::quiet_NaN();
invalid_point_.z = std::numeric_limits<float>::quiet_NaN();
将点赋值成nan的方法,需要引入 limits 头文件。
3.2.3
PointCloudT::Ptr cloud_msg = boost::shared_ptr<PointCloudT>(new PointCloudT());
声明了一个PointCloudT::Ptr的指针cloud_msg并进行初始化,PointCloudT::Ptr的数据类型为boost::shared_ptr。
3.2.4
// 将 inf 与 nan 点 设置为无效点
if (!std::isfinite(range))
{
// std::cout << " " << i << " " << scan_msg->ranges[i];
point_tmp = invalid_point_;
continue;
}
将这段去掉也不会报错。貌似inf与nan直接进行数学运算不好报错。。。有待确认???
3.2.5
cloud_msg->width = scan_msg->ranges.size();
cloud_msg->height = 1;
cloud_msg->is_dense = false; // contains nans
// 将scan_msg的消息头 赋值到 PointCloudT的消息头
pcl_conversions::toPCL(scan_msg->header, cloud_msg->header);
// 由于ros中自动做了 pcl::PointCloud 到 sensor_msgs/PointCloud2 的数据类型的转换
// 所以这里直接发布 pcl::PointCloud 即可
pointcloud2_publisher_.publish(cloud_msg);
这段就是对点云数据的其他数据进行赋值
- width为scan的个数
- is_dense表示数据中是否全是有限值,当然不是,因为我们放入了nan
- pcl_conversions::toPCL()函数将scan_msg->header赋值到cloud_msg->header中
这样操作完之后,cloud_msg的数据就填充完整了,我们可以直接将其发布出去了。
3.3 CMakeLists.txt添加可执行
在文件末尾处添加如下语句
add_executable(${PROJECT_NAME}_scan_to_pointclod2_converter_node
src/scan_to_pointclod2_converter.cc)
add_dependencies(${PROJECT_NAME}_scan_to_pointclod2_converter_node
${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})
target_link_libraries(${PROJECT_NAME}_scan_to_pointclod2_converter_node
${catkin_LIBRARIES}
)
3.4 launch文件
本篇文章对应的数据包, 请在我的公众号中回复 lesson1 获得,并将launch中的bag_filename更改成您实际的目录名。
<launch>
<!-- bag的地址与名称 -->
<arg name="bag_filename" default="/home/lx/bagfiles/lesson1.bag"/>
<!-- 使用bag的时间戳 -->
<param name="use_sim_time" value="true" />
<!-- 启动节点 -->
<node name="lesson2_scan_to_pointclod2_converter_node"
pkg="lesson2" type="lesson2_scan_to_pointclod2_converter_node" output="screen" />
<!-- launch rviz -->
<node name="rviz" pkg="rviz" type="rviz" required="false"
args="-d $(find lesson2)/launch/scan2pointcloud.rviz" />
<!-- play bagfile -->
<node name="playbag" pkg="rosbag" type="play"
args="--clock $(arg bag_filename)" />
</launch>
3.5 运行
rospack profile
roslaunch lesson2 scan_to_pointcloud2_converter.launch
3.6 运行结果
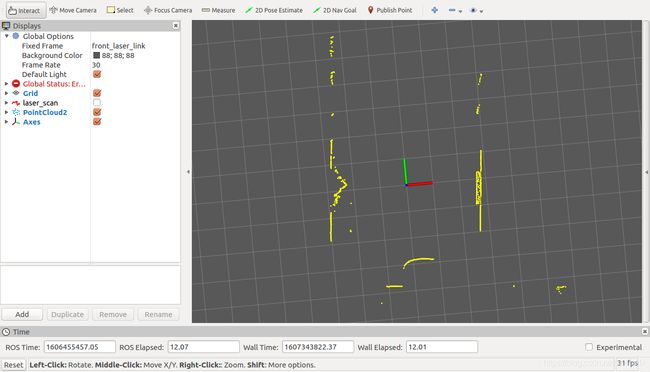
由于已经配置好了rviz,所以将直接出现下边的图片。
这张图片展示的将sensor_msgs/LaserScan转换成的sensor_msgs/PointCloud2的数据。
 接下来,将rviz左边的PointCloud2的对号点掉,在将laser_scan的对号点出来,将得到下边的图片。这就是sensor_msgs/LaserScan格式的数据,点云的形状肯定是一样的,因为我们没有做其他的操作。
接下来,将rviz左边的PointCloud2的对号点掉,在将laser_scan的对号点出来,将得到下边的图片。这就是sensor_msgs/LaserScan格式的数据,点云的形状肯定是一样的,因为我们没有做其他的操作。
 接下来,新开一个终端,输入如下命令,将得到下图所示:
接下来,新开一个终端,输入如下命令,将得到下图所示:
可以看到,我们发布的 /pointcloud2_converted ,这个topic的数据类型为sensor_msgs/PointCloud2。

4 总结
本篇文章首先我介绍了如何在ros中使用pcl,带着大家一步一步地进行配置。
之后,通过一小段程序,展示了如何将LaserScan转成成pcl::PointCloud,并发布sensor_msgs/PointCloud2消息的topic。
本节的代码不再和之前一样,只有一个.cc文件,本节的代码将类的定义放在头文件里。之后代码会越来越复杂,希望小白同学可以跟的上。
虽然代码已经写好了,但还是希望小白能够自己编写一遍代码,代码不自己写是不会理解的。
5 Next
本篇文章我们将数据类型转换好了,下一篇文章将使用PCL的ICP算法进行scan-to-scan的匹配,计算2帧scan间的位姿。
文章将在 公众号: 从零开始搭SLAM 进行同步更新,欢迎大家关注,以在文章更新的第一时间通知您。
同时,也希望您将这个公众号推荐给您身边做激光SLAM的人们,大家共同进步。
如果您对我写的文章有什么建议,或者想要看哪方面功能如何实现的,请直接在公众号中回复,我可以收到,并将认真考虑您的建议。
