气动人工肌肉的应用概况
A Survey on Applications of Pneumatic Artificial Muscles
Georgios Andrikopoulos, Georgios Nikolakopoulos and Stamatis Manesis
19th Mediterranean Conference on Control and Automation
摘要:
本文综述了气动人工肌肉(PAMs)的应用。PAMs是高度非线性的气动执行器,其伸长率与间隔压力成正比。近十年来,PAMs以其强度高、重量小等优点,在工业和科学利用上有了显著的提高,而在相关科学文献中出现了各种类型、具有不同技术特性的PAMs。本文将总结PAMs的关键实现应用,主要集中在以下领域:a)生物机器人,b)医疗,c)工业和d)航空航天应用。
介绍:
气动肌肉致动器[1],又称McKibben气动人工肌肉(PAM)[2]、[3]、[4]、[5]、流体肌肉[6]或仿生致动器[7],是一种管状致动器,其特点是[11]1、[11]0、[10]、[11]、[12]受压后,致动长度减小。这个家族最著名的成员是McKibben肌肉,由医生发明于1950年代,约瑟夫·l·麦克基本和作为矫正的设备用于脊髓灰质炎患者[2],虽然做了PAMs的第一个商业化的普利司通橡胶公司1980年代的日本。PAMs是非常轻的致动器,具有平滑、准确和快速响应的特点,并且能够在完全拉伸时产生显著的力。
PAMs的典型制造可以发现是一个长的合成或天然橡胶管,包裹在人造网,如kevlar,在预定的角度。保护橡胶涂层围绕着纤维包装和适当的金属配件在两端连接。PAM将气动动力转换为拉力,与传统的气动气缸相比,它有许多优点,如高的力重量比,可变的安装可能性,无机械部件,低压缩空气消耗和低成本。当压缩空气被应用到橡胶管内部,它的长度收缩和径向膨胀。当空气出管,内网作为一个弹簧,恢复管在其原来的形式。这个驱动提醒操作一个单作用的气动气缸弹簧返回,而这种可逆的物理变形期间收缩和扩张的肌肉导致线性运动。
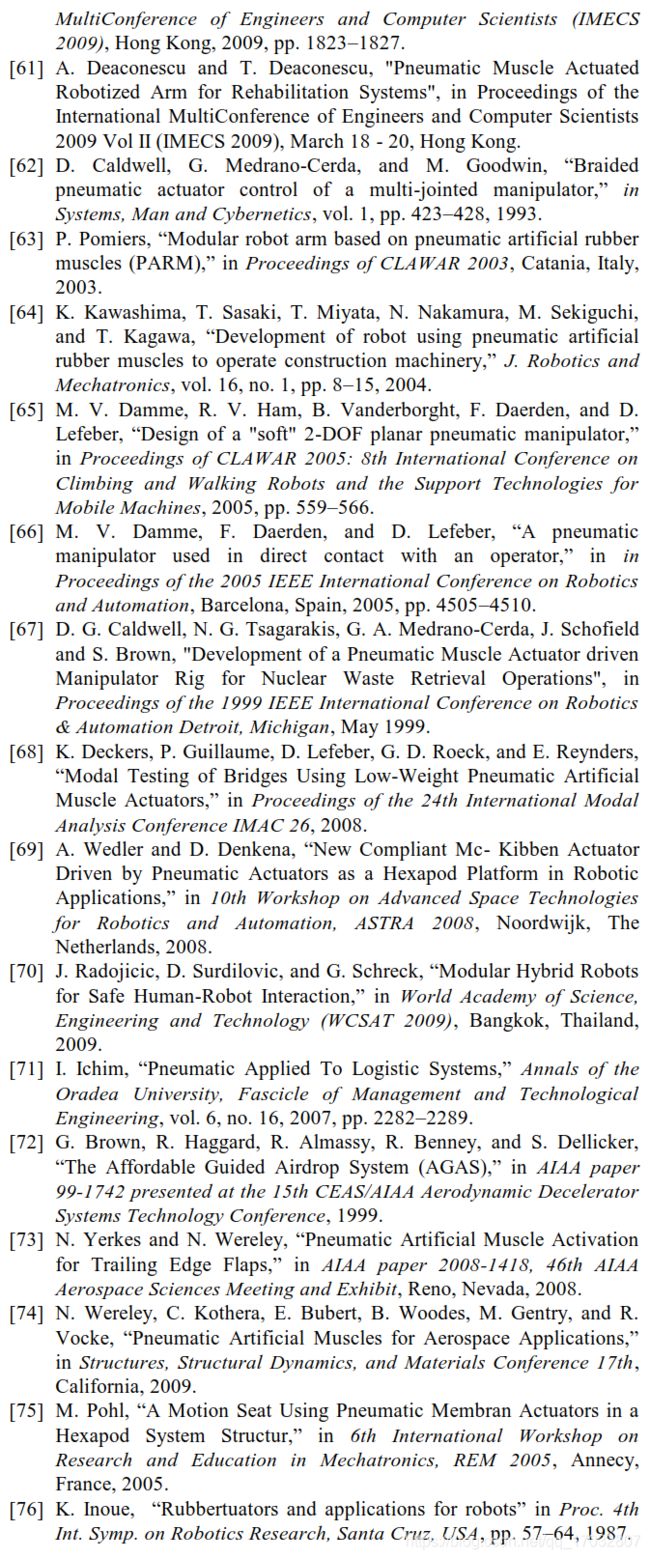
应该指出的是,在控制应用程序中使用PAM的最大优势是,对于位置控制,只需要控制一个模拟变量,而对于气动气缸的相同操作,需要控制两个模拟变量(每个腔室一个)。因此,在气动气缸的情况下,比在PAMs的情况下更难以在气缸腔内找到两个表压之间的平衡。典型的PAMs类型和相应的命名如图1所示。
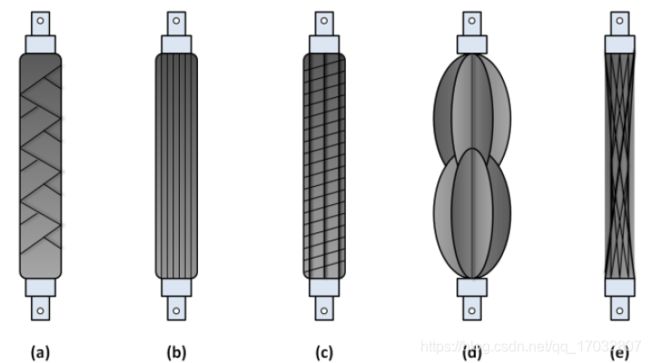 图1所示:PAMs的不同类型:(a)麦基本肌/编织肌(b)褶皱肌(c)亚洛特网肌(d)罗麦克肌(e) Paynter双曲面肌。
图1所示:PAMs的不同类型:(a)麦基本肌/编织肌(b)褶皱肌(c)亚洛特网肌(d)罗麦克肌(e) Paynter双曲面肌。
这篇文章的目的是提供一个详细的调查PAMs的应用,可以作为一个基本的参考设计。这些应用将突出PAMs在以下领域的最成功应用:a)仿生机器人,b)医疗,c)工业和d)航空航天应用。由于这一最有前途的技术的应用有限,这样的调查将推动该领域的所有未来发展,并将在该领域最重要的出版物中提供参考。
本文其余部分的结构如下。在第二节中,将介绍PAM的基本建模方法。第三节将介绍PAMs最重要的应用,并将其分类于特定的科学领域,而第四节将得出结论。
2.PAM的建模
在建模PAMs的科学领域中,已经出现了各种建模方法。这些建模方法虽然包含了对PAMs的基本和更详细的分析,但在PAM应用领域中,大多数模型都基于PAM的几何形状,这主要是由于模型的简单性和与实验行为的高度相关性。在这些模型中,Chou和Hannaford模型[1]和Tondu和Lopez模型[15]已经被广泛应用于第三节中将要介绍的大部分应用中。
Chou和Hannaford模型是PAM静态性能的最简单的几何模型。该模型是有效的在以下假设:a)致动器圆柱体形,b)鞘中线程不能伸展的,总是在接触乳胶膀胱的外径,c)之间的摩擦力之间的油管和鞘,鞘的纤维可以忽略不计,和d)乳胶管部队可以忽略不计。
通过这种方法,PAM执行器可以被建模为一个圆柱体,如图2所示,圆柱体长度为L,螺纹长度为b,直径为D,螺纹匝数为n。角度绕角为螺纹与纵轴[16]的夹角。
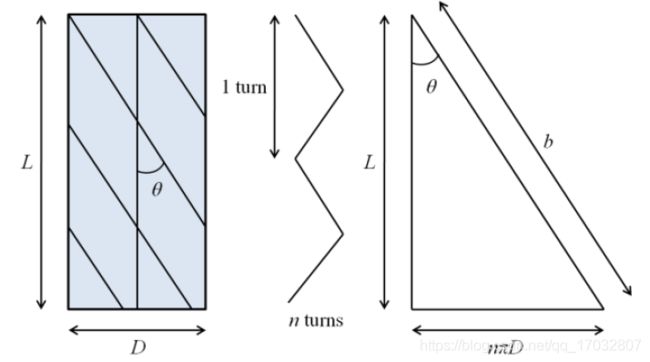 图2所示:PAM的简化几何模型。
图2所示:PAM的简化几何模型。
当PAM执行器膨胀时,D和L变化,n和b保持不变,PAM s的长度和直径表达式可以表示为:
![]()
螺纹长度可以计算为
![]()
式(2)在文献中为PAM的几何关系,其体积由:
![]()
利用能量守恒原理,PAM简单的几何力Fg可以计算为仪表相对压力P'乘以体积对长度的变化(这个模型也可以在[17]中找到)
![]()
另一种简单且应用广泛的PAM几何模型是Tondu和Lopez[15]的模型。基于这种方法,通过:1)利用类似肌肉的几何描述[14],b)假设无伸展性的网状材料,和c)角变化长度变更PAM的年代,以下可以派生的数学建模方法,基于虚功定理[13]
![]()
其中:

在式(5)和(6)中,r0为名义内半径,l为肌肉长度,l0为初始名义长度,P为压力,最后的θ0为膜纤维与肌肉轴的初始夹角,[18]中也可以找到该模型。
该模型的一个缺点是,它的设计是基于一个连续的圆柱形肌肉的假设,而当它收缩时,它的两端是圆锥形状。因此,肌肉收缩得越多,其活跃部分就减少得越多。这一现象导致实际最大收缩理论上小于预期(5)[18]。为了改进式(5),在bb0中加入了经验因子k来解释PAM的端部变形:
![]()
其中![]() 和
和![]() 是由下式提供:
是由下式提供:

在考虑的静态模型中以这种方式插入,参数k的插入不修改在零收缩时给出的最大力的值。这与所进行的实验是一致的,因为PAM只有在其收缩比为零时才呈圆柱形。
3.PAMs的应用
A.生物学应用
迄今为止,PAMs主要应用于仿生机器人或仿生机器人领域。由于这些驱动器与实际的骨骼肌的特征相似,研究人员试图通过PAMs来模拟软组织、骨骼、肌腱和皮肤的柔顺结构。这种方法导致了仿生机器人的发展,它们模仿人类和动物的形态和生理。图3展示了PAMs的几种生物机器人应用。
首创的PAM驱动机器人是Shadow robot Co.的Shadow两足行走机器人(图3.1),这是一种自1988年以来一直在开发的真人大小的类人机器人。28个PAMs(每条腿上14个)在机器人的8个关节上活动,使得总共有12个自由度(DOF)。在[20]中,仿人机器人智能软臂控制(ISAC)(图3.2)由两个六自由度的手臂和多个拮抗驱动手臂各关节的PAMs组成。在[21]中介绍了一个六足昆虫机器人,称为Airbug(图3.3),以流体肌肉作为执行器和拮抗执行器的控制概念。
在[22]中,我们搭建了一个跳跃机器人(图3.4),它由上下腿、臀部和身体组成,通过褶皱PAMs进行膝关节运动,沿着导向轴滑动。在[23]中,作者开发了气动驱动动态稳定四足机器人(PANTER)的四足原型(图3.5)。PANTER的每条腿都有四个活动自由度,并由PAM驱动。在[24]中引入了Ajax“机器人”(图3.6)。阿贾克斯是一个受蟑螂启发的机器人,它的腿是通过几个PAMs控制的。在[25]中构建了两足机器人Lucy”(图3.7),[25]是一个两腿铰接的二维步行机器人,身体使用12个PAMs, 6个DOFs。在[26]中出现了PAM自主驱动的两足机器人Stumpy”(图3.8)。在[27]中,作者设计了一个由气动肌肉驱动的机械手(图3.9),包含了基本的人类手指、拇指、前臂和肘部运动。在[28]中,我们构建了一个气动肌肉自行车实验装置(图3.10),该装置由PAMs驱动的人体下肢的一自由度比例模型,安装在一个固定的自行车上。在[29]中开发了一种具有拮抗对PAMs的三足机器人(图3.11),该机器人由非线性振荡器网络控制。在[30]中,一个气动驱动的两足跳跃和着陆机器人称为Mowgli”(图3.12)已经被提出。Mowgli的人工肌肉骨骼系统由6个pam组成。
在[31]中,一个双自由度的手臂(图3.13)验证了混合驱动的概念,该手臂使用了固有的安全PAMs,并增加了小型电动执行器,受人骨骼启发的机器人连杆,以及新设计的分布式紧凑压力调节器。在[32]中,我们设计了一个基于PAMs的人工肌肉骨骼系统的两足机器人(图3.14)。在[33]中,作者构建并控制了一个四足机器人(图3.15),使用拮抗配对的PAMs驱动骨骼肌肉系统。[34]开发了一款名为Zwei Arm Roboter的全PAM驱动的仿人肌肉机器人躯干(图3.16),具有类人的比例和功能。在[35]中,我们设计了一款气动运动员机器人(图3.17),其肌肉骨骼系统由PAMs驱动,并应用人体肌肉激活模式进行动态双足行走。
通过四个PAMs驱动的垂直爬坡机器人(图3.18)的开发和控制已经在[36]中描述。费斯托公司,公司制造了Airic s“机械手臂(图3.19),用人工骨骼和肌肉描绘。在这个机器人中,使用基于压电技术的非常小的瓣膜,通过30 PAMs移动骨骼结构。
此外,Festo AG & Co.推出了-Aqua ray“机器人(图3.20),这是一种远程控制鱼,使用三对对抗的六个PAMs,借助人工肌腱移动两翼和尾巴。Shadow Robot Co.展示了Shadow Robot - leg(图3.21),这是一款人形尺寸的pam驱动机器人腿,为研究动力假肢的肌电控制而开发。目前,布里斯托尔机器人实验室正在开发一种带有PAMs驱动的人工眼动系统的原型机器人眼(图3.22)。在[37]中,采用4个人工气动肌肉驱动器驱动2个自由度的机器人。
B.医疗应用
PAM执行器的几个优点之一是能够提供高功率输出,重量相对较轻,并具有固有的遵从性,从而满足人机交互所需的安全性、简单性和轻便性。这些特征,结合这一事实PAM具有类似的特性与人类的肌肉,使它成为一个有前途的致动器选择治疗设备,这是专为患有退行性肌肉疾病的康复治疗,肢体障碍或神经损伤,影响他们的运动能力。在本小节中,将重点介绍在医疗应用中的PAMS。图4描述了这些应用程序中的大多数。
在[38]中,一个PAM在一个轮椅安装机器人手臂的原型中使用的性能已经被报道。在[39]中描述了人体肌肉增强器(HME)系统的设计和控制。该系统增强了需要部分下肢负重步态支持的受试者的肌肉能力。
双足运动系统设计使用PAMs来提供所需的气动动力,以操作运动支持机器人矫形。在[40]中,作者研究了顺应性调节和控制拮抗PAMs对构建灵巧假肢手和构建力量辅助装置的使用,该装置可用于增强那些患有退行性肌肉萎缩疾病的人的力量。在[41]、[42]中展示了一个由PAM驱动的前臂假体(图4.1),包括屈肌和伸肌组。
[43]报道了为瘫痪患者提供肌肉支撑的装甲式肌肉套装(图4.2)的发展。肌肉服是一种没有金属框架的服装,使用压缩空气驱动的PAMs。在[44]中,已经构建了一个用于腿部康复的动力踝足矫形器(图4.3)。在步态的不同阶段,使用PAMs为足底屈曲提供单一关节支持。一种称为RUPERT”的治疗设备(图4.4),有五个dof,通过四个PAMs供电,已在[45]、[46]中描述。该装置能够为上肢损伤患者提供临床治疗之外的补充治疗。
在[47]中开发了外骨骼(图4.5),包括配备PAMs的髋关节矫形器,在安装了身体缺陷时帮助下肢运动。在[48]、[49]、[50]中,作者开发了一种动力踝足矫形器(图4.6),该矫形器利用PAMs帮助患者在受伤后进行步态康复。[51]给出了用于虚拟环境中训练和康复的五自由度PAM驱动的触觉臂外骨骼(图4.7)的设计。在[52]、[53]、[54]中,作者开发了柔顺的PAM驱动外骨骼系统,允许执行上肢(图4.8- 4.9)和下肢(图4.10)理疗。
在[55]中,描述了一种由橡胶PAMs驱动的可穿戴动力辅助手套(图4.11)。该装置通过安装弯曲橡胶帕姆来辅助弯曲运动,增加手指的抓握力。在[56]中开发了一套由pam驱动的膝关节康复装置(图4.12)。在[57]中,作者介绍了PAMs在一种新型机动矫形器中的应用(图4.13),用于神经障碍患者的强化居家步态训练。在[58]中已经出现了一个动力辅助机器人手臂,它使用覆盖着外骨骼的橡胶球来模拟双关节肌肉的运动。在[59]中研制了一种由PAM驱动的生物反馈康复机器人系统。在[60]中,开发了一种PAM驱动的等速设备(图4.14),设计用于髋关节和膝关节的康复训练,而在[61]中,作者提出了一种气动肌肉驱动的机器人手臂,用于机车残疾人士。
C.工业应用
在过去的几年里,PAMs在工业机器人制造中的应用受到了很大的关注。PAMs能够在低速和中速下产生高扭矩,无需传动装置即可轻松安装,由于其重量轻,可以作为便携式机械的执行机构。此外,PAMs具有自然的顺应性和抗冲击性能,是驱动工业机械和工业机器人的一个合适的解决方案,特别是安全的人机交互的工业机器人。图5展示了PAMs的几种工业应用。
在[62]中,作者开发了一个具有三个手指和一个对生拇指的多关节机械手,由18个编织的PAMs提供动力。基于橡胶PAMs的模块化单自由度气动元件和三自由度机械臂(图5.1)的开发已在[63]中描述。
在[64]中开发了六自由度橡胶PAM驱动的机器人手臂系统(图5.2),在[65]、[66]中出现了一种由褶皱气动人工肌肉驱动的协助处理重负荷的两自由度平面机器人机械手(图5.3)。在[67]中,作者提出了一种用于检索放射性材料的远程操作装置的原型设计,该装置使用了传统的人工操纵杆与PAMs相结合的组合。
使用PAMs识别桥梁的模态参数(图5.4)已经在[68]中引入。在[69]中,一种由PAMs驱动的并行六足工具(图5.5)。该机器人由六个离散线性致动器组成,每个致动器都装配成PAMs的对抗装置,并带有压力和位置传感器。在[70]中,作者开发了一种混合机器人原型(图5.6),其中包括两个风箱和一个PAM驱动模块,用于安全的人机交互。
在[71]中,PAM执行器的其他工业应用也有报道。其中一项是夹持过程(图5.7),在夹持过程中,充气人造肌肉距离手指旋转中心足够近,而这一小块肌肉足以完成夹持动作。PAMs也可以用于简单的定位系统(图5.8)。在这种情况下,可以通过手动杠杆阀对肌肉加压或排气,根据需要提高或降低工件。
D.航空航天应用
在n[72]时,作者开发了AGAS"系统,这是一个自主控制可展开的空投系统,由一个圆形降落伞组成,由四个PAMs控制,而PAM激活的后缘襟翼用于飞行控制(图6.1)在[73]中描述。在[74]中,PAM应用于机翼截面的变形单元和机翼或旋翼桨叶的后缘襟翼的驱动方案。
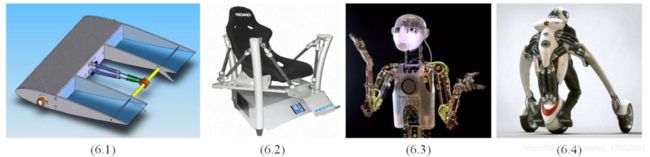 图6所示。PAMs在航空和其他方面的应用:(6.1)PAM激活后缘襟翼,(6.2)FM运动座椅,(6.3)RoboThespian, (6.4) Deus Ex Machina
图6所示。PAMs在航空和其他方面的应用:(6.1)PAM激活后缘襟翼,(6.2)FM运动座椅,(6.3)RoboThespian, (6.4) Deus Ex Machina
E.其它应用
在[75]中,开发了“FM运动座椅”(图6.2),这是一种基于六足结构的驾驶和飞行模拟器,6个面向空间的PAMs在所有6个轴上移动座椅,也作为被动悬架。工程艺术有限公司(Penryn,康沃尔,英国2010),开发了RoboThespian”(图6.3)。这个机器人是一个真人大小的由PAM驱动的类人机器人,它被创造用来教育、交流、互动和娱乐。
Jake Loniak(加州帕萨迪纳艺术中心,2008年)设计了Deus Ex Machina”项目(图6.4),这是一辆电动、单乘客、垂直停车、可穿戴的摩托车。头盔后面有7块人工椎骨支撑着骑车人的头部,通过36块气动肌肉和2个线性驱动器结合在骑车人的身体上,实现了对“机械之神”的控制。
4.结论
本文对气动人工肌肉的应用进行了综述。本文对广泛使用的PAM几何模型进行了简要建模,同时重点关注了以下领域中最重要的应用:A)仿生、b)医学、c)工业和d)航空航天应用。这些应用程序都附带了大量的参考资料,使本文成为使用PAMs开发应用程序的基本入门指南。