自动驾驶算法(一):Dijkstra算法讲解与代码实现
目录
0 本节关键词:栅格地图、算法、路径规划
1 Dijkstra算法详解
2 Dijkstra代码详解
0 本节关键词:栅格地图、算法、路径规划

1 Dijkstra算法详解
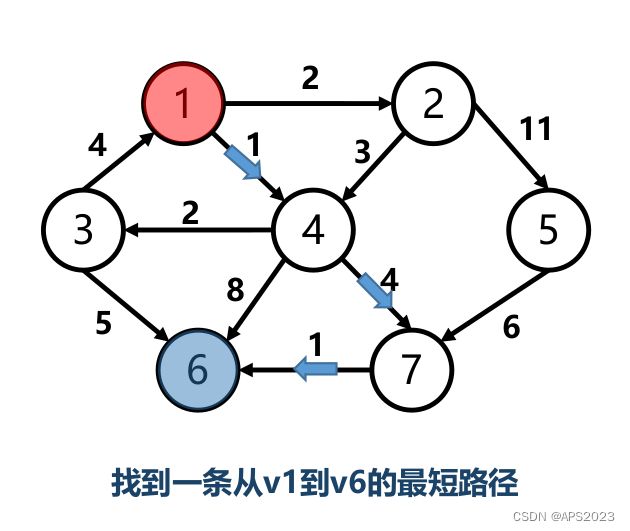
用于图中寻找最短路径。节点是地点,边是权重。
从起点开始逐步扩展,每一步为一个节点找到最短路径:
While True:
1.从未访问的节点选择距离最小的节点收录(贪心思想)
2.收录节点后遍历该节点的邻接节点,更新距离我们举例子说明一下,在机器人路径规划中,通常用open list、closed list表达:
open list 表示从该节点到起点已经有路径的节点
closed list 表示已经找到最短路径的节点
Step1:从起点开始,将起点放入open list中,选择距离最短的节点进行收录。
open list 1(0)(min) closed list | | open list closed list 1(0)Step2:遍历1号节点的邻接节点(4、2号节点)
open list 2(2)(1-->2) 4(1)(1-->4)(min) closed list 1(0) | | open list 2(2)(1-->2) closed list 1(0) 4(1)(1-->4)4号节点收录后我们需要对其邻接节点更新距离。(3、6、7号节点)
Step3:3号节点我们找到1->4->3路径,6号节点我们找到1->4->6路径,7号节点我们找到1->4->7路径。
open list 2(2)(1-->2)(min) 3(3)(1-->4-->3) 6(9)(1-->4-->6) 7(5)(1-->4-->7) closed list 1(0) | | open list 3(3)(1-->4-->3) 6(9)(1-->4-->6) 7(5)(1-->4-->7) closed list 1(0) 4(1)(1-->4) 2(2)(1-->2)Step4:遍历2的邻接节点,我们发现4号节点已经在close list中(不需要被更新),我们更新5号节点。
open list 3(3)(1-->4-->3)(min) 6(9)(1-->4-->6) 7(5)(1-->4-->7) 5(13)(1->2-->5) closed list 1(0) | | open list 6(9)(1-->4-->6) 7(5)(1-->4-->7) 5(13)(1->2-->5) closed list 1(0) 4(1)(1-->4) 2(2)(1-->2) 3(3)(1-->4-->3)Step5:遍历3的邻接节点,(3-->1无需更新,更新3-->6 1436(8) (因为我们有到3的最短距离)),而我们已经为6号节点找到路径6(9)(146),更新6号节点的路径。
open list 6(9)(1-->4-->6)(1->4->3-->6 7) 7(5)(1-->4-->7)(min) 5(13)(1->2-->5) closed list 1(0) 4(1)(1-->4) 2(2)(1-->2) 3(3)(1-->4-->3) | | open list 6(8)(1->4->3-->6) 5(13)(1->2-->5) closed list 1(0) 4(1)(1-->4) 2(2)(1-->2) 3(3)(1-->4-->3) 7(5)(1-->4-->7)Step6:遍历7的邻接节点(6号节点)(1 4 7 6 = 6)比之前的8小,对6号距离再次更新。
open list 6(8)(1->4->3-->6)(1->4->7-->6 6)(min) 5(13)(1->2-->5) closed list 1(0) 4(1)(1-->4) 2(2)(1-->2) 3(3)(1-->4-->3) 7(5)(1-->4-->7) | | open list 5(13)(1->2-->5) closed list 1(0) 4(1)(1-->4) 2(2)(1-->2) 3(3)(1-->4-->3) 7(5)(1-->4-->7) 6(6)(1-->4-->7-->6)Step7:遍历6的邻接节点(6号节点)结束
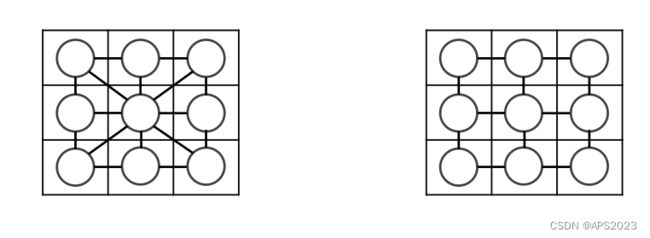
栅格地图初介绍:
假设图中灰色的是障碍物,红色的是机器人。在避障时,我们的常用做法是通过膨胀障碍物,将机器人视为质点来规划路径,然后对地图进行栅格化,将地图弄成一块一块的。最后将栅格地图转化为有权地图。我们可以把栅格地图的每个栅格看作是有权图的节点,机器人的运动范围可以看作是有权图的节点和节点之间的连接。


2 Dijkstra代码详解
这里我们先配置下代码环境,最好是在python3.9下,我们创建conda虚拟环境:
conda create -n nav python=3.9安装所需库:
pip install numpy scipy matplotlib pandas cvxpy pytest -i https://pypi.tuna.tsinghua.edu.cn/simple我们的代码如下:
""" Grid based Dijkstra planning author: Atsushi Sakai(@Atsushi_twi) """ import matplotlib.pyplot as plt import math show_animation = True class Dijkstra: def __init__(self, ox, oy, resolution, robot_radius): """ Initialize map for planning ox: x position list of Obstacles [m] oy: y position list of Obstacles [m] resolution: grid resolution [m] rr: robot radius[m] """ self.min_x = None self.min_y = None self.max_x = None self.max_y = None self.x_width = None self.y_width = None self.obstacle_map = None self.resolution = resolution self.robot_radius = robot_radius self.calc_obstacle_map(ox, oy) self.motion = self.get_motion_model() class Node: def __init__(self, x, y, cost, parent_index): self.x = x # index of grid self.y = y # index of grid self.cost = cost # g(n) self.parent_index = parent_index # index of previous Node def __str__(self): return str(self.x) + "," + str(self.y) + "," + str( self.cost) + "," + str(self.parent_index) def planning(self, sx, sy, gx, gy): """ dijkstra path search input: s_x: start x position [m] s_y: start y position [m] gx: goal x position [m] gx: goal x position [m] output: rx: x position list of the final path ry: y position list of the final path """ start_node = self.Node(self.calc_xy_index(sx, self.min_x), self.calc_xy_index(sy, self.min_y), 0.0, -1) # round((position - minp) / self.resolution) goal_node = self.Node(self.calc_xy_index(gx, self.min_x), self.calc_xy_index(gy, self.min_y), 0.0, -1) open_set, closed_set = dict(), dict() # key - value: hash表 open_set[self.calc_index(start_node)] = start_node while 1: c_id = min(open_set, key=lambda o: open_set[o].cost) # 取cost最小的节点 current = open_set[c_id] # show graph if show_animation: # pragma: no cover plt.plot(self.calc_position(current.x, self.min_x), self.calc_position(current.y, self.min_y), "xc") # for stopping simulation with the esc key. plt.gcf().canvas.mpl_connect( 'key_release_event', lambda event: [exit(0) if event.key == 'escape' else None]) if len(closed_set.keys()) % 10 == 0: plt.pause(0.001) # 判断是否是终点 if current.x == goal_node.x and current.y == goal_node.y: print("Find goal") goal_node.parent_index = current.parent_index goal_node.cost = current.cost break # Remove the item from the open set del open_set[c_id] # Add it to the closed set closed_set[c_id] = current # expand search grid based on motion model for move_x, move_y, move_cost in self.motion: node = self.Node(current.x + move_x, current.y + move_y, current.cost + move_cost, c_id) n_id = self.calc_index(node) if n_id in closed_set: continue if not self.verify_node(node): continue if n_id not in open_set: open_set[n_id] = node # Discover a new node else: if open_set[n_id].cost >= node.cost: # This path is the best until now. record it! open_set[n_id] = node rx, ry = self.calc_final_path(goal_node, closed_set) return rx, ry def calc_final_path(self, goal_node, closed_set): # generate final course rx, ry = [self.calc_position(goal_node.x, self.min_x)], [ self.calc_position(goal_node.y, self.min_y)] parent_index = goal_node.parent_index while parent_index != -1: n = closed_set[parent_index] rx.append(self.calc_position(n.x, self.min_x)) ry.append(self.calc_position(n.y, self.min_y)) parent_index = n.parent_index return rx, ry def calc_position(self, index, minp): pos = index * self.resolution + minp return pos def calc_xy_index(self, position, minp): return round((position - minp) / self.resolution) def calc_index(self, node): return node.y * self.x_width + node.x def verify_node(self, node): px = self.calc_position(node.x, self.min_x) py = self.calc_position(node.y, self.min_y) if px < self.min_x: return False if py < self.min_y: return False if px >= self.max_x: return False if py >= self.max_y: return False if self.obstacle_map[node.x][node.y]: return False return True def calc_obstacle_map(self, ox, oy): ''' 第1步:构建栅格地图 ''' self.min_x = round(min(ox)) self.min_y = round(min(oy)) self.max_x = round(max(ox)) self.max_y = round(max(oy)) print("min_x:", self.min_x) print("min_y:", self.min_y) print("max_x:", self.max_x) print("max_y:", self.max_y) self.x_width = round((self.max_x - self.min_x) / self.resolution) self.y_width = round((self.max_y - self.min_y) / self.resolution) print("x_width:", self.x_width) print("y_width:", self.y_width) # obstacle map generation # 初始化地图 self.obstacle_map = [[False for _ in range(self.y_width)] for _ in range(self.x_width)] # 设置障碍物 for ix in range(self.x_width): x = self.calc_position(ix, self.min_x) for iy in range(self.y_width): y = self.calc_position(iy, self.min_y) for iox, ioy in zip(ox, oy): d = math.hypot(iox - x, ioy - y) if d <= self.robot_radius: self.obstacle_map[ix][iy] = True break @staticmethod def get_motion_model(): # dx, dy, cost motion = [[1, 0, 1], [0, 1, 1], [-1, 0, 1], [0, -1, 1], [-1, -1, math.sqrt(2)], [-1, 1, math.sqrt(2)], [1, -1, math.sqrt(2)], [1, 1, math.sqrt(2)]] return motion def main(): # start and goal position sx = -5.0 # [m] sy = -5.0 # [m] gx = 50.0 # [m] gy = 50.0 # [m] grid_size = 2.0 # [m] robot_radius = 1.0 # [m] # set obstacle positions ox, oy = [], [] for i in range(-10, 60): ox.append(i) oy.append(-10.0) for i in range(-10, 60): ox.append(60.0) oy.append(i) for i in range(-10, 61): ox.append(i) oy.append(60.0) for i in range(-10, 61): ox.append(-10.0) oy.append(i) for i in range(-10, 40): ox.append(20.0) oy.append(i) for i in range(0, 40): ox.append(40.0) oy.append(60.0 - i) if show_animation: # pragma: no cover plt.plot(ox, oy, ".k") plt.plot(sx, sy, "og") plt.plot(gx, gy, "xb") plt.grid(True) plt.axis("equal") dijkstra = Dijkstra(ox, oy, grid_size, robot_radius) rx, ry = dijkstra.planning(sx, sy, gx, gy) if show_animation: # pragma: no cover plt.plot(rx, ry, "-r") plt.pause(0.01) plt.show() if __name__ == '__main__': main()先执行一下看看效果:
我们现在来详解一下:
我们从main函数开始:
# 1. 设置起点和终点 sx = -5.0 # [m] sy = -5.0 # [m] gx = 50.0 # [m] gy = 50.0 # [m] # 2. 设置珊格的大小和机器人的半径 grid_size = 2.0 # [m] robot_radius = 1.0 # [m] # 3. 设置障碍物的位置(图中的黑点就是) ox, oy = [], [] # 3.1 设置外围的四堵墙 (-10,-10) --> (60,-10) 最下面的一条线 for i in range(-10, 60): ox.append(i) oy.append(-10.0) # 3.1 设置外围的四堵墙 (60,-10) --> (60,60) 最右面的一条线 for i in range(-10, 60): ox.append(60.0) oy.append(i) # 3.1 设置外围的四堵墙 (-10,60) --> (61,60) 最上面的一条线 for i in range(-10, 61): ox.append(i) oy.append(60.0) # 3.1 设置外围的四堵墙 (-10,-10) --> (-10,61) 最左面的一条线 for i in range(-10, 61): ox.append(-10.0) oy.append(i) # 3.2 障碍物 for i in range(-10, 40): ox.append(20.0) oy.append(i) for i in range(0, 40): ox.append(40.0) oy.append(60.0 - i) # 4 画图 起点、终点、障碍物都画出来 if show_animation: # pragma: no cover plt.plot(ox, oy, ".k") plt.plot(sx, sy, "og") plt.plot(gx, gy, "xb") plt.grid(True) plt.axis("equal")这段代码就设置了边框和障碍物区域并把他们可视化了:
就是我图中画的区域。
#生成了Dijkstra的对象 调用其中的方法(障碍物信息、珊格大小、机器人半径) dijkstra = Dijkstra(ox, oy, grid_size, robot_radius)生成了Dijkstra的对象。我们来看这个类的构造函数,进入一个类首先执行构造函数:
def __init__(self, ox, oy, resolution, robot_radius): """ Initialize map for planning ox: x position list of Obstacles [m] oy: y position list of Obstacles [m] resolution: grid resolution [m] rr: robot radius[m] """ self.min_x = None self.min_y = None self.max_x = None self.max_y = None self.x_width = None self.y_width = None self.obstacle_map = None # 珊格大小 self.resolution = resolution # 机器人半径 self.robot_radius = robot_radius # 构建珊格地图 self.calc_obstacle_map(ox, oy) self.motion = self.get_motion_model()我们先来看是怎么创建珊格地图的:
def calc_obstacle_map(self, ox, oy): ''' 第1步:构建栅格地图 ''' # 1. 获得地图的边界值 self.min_x = round(min(ox)) self.min_y = round(min(oy)) self.max_x = round(max(ox)) self.max_y = round(max(oy)) print("min_x:", self.min_x) print("min_y:", self.min_y) print("max_x:", self.max_x) print("max_y:", self.max_y) # 2.计算x、y方向珊格个数 self.x_width = round((self.max_x - self.min_x) / self.resolution) self.y_width = round((self.max_y - self.min_y) / self.resolution) print("x_width:", self.x_width) print("y_width:", self.y_width) # obstacle map generation # 3.初始化地图 都设置为false 表示还没有设置障碍物 self.obstacle_map = [[False for _ in range(self.y_width)] for _ in range(self.x_width)] # 4.设置障碍物 遍历每一个栅格 for ix in range(self.x_width): # 通过下标计算珊格位置 x = self.calc_position(ix, self.min_x) for iy in range(self.y_width): y = self.calc_position(iy, self.min_y) # 遍历障碍物 for iox, ioy in zip(ox, oy): # 计算障碍物到珊格的距离 d = math.hypot(iox - x, ioy - y) # 膨胀障碍物 如果距离比机器人半径小 机器人不能通行 if d <= self.robot_radius: # 设置为true self.obstacle_map[ix][iy] = True break首先我们获得了地图的边界值,算出了每一个方向上有多少珊格数量。
比如我们的长是100m(self.max_x - self.min_x = 100),珊格大小为3,那么我们每一行不就是有33个珊格啦~。
我们初始化obstacle_map,这个大小为珊格长 * 珊格宽的大小,我们将他们初始化为false表示这个地方没有障碍物。
然后我们遍历每一个珊格for ix in range(self.x_width)、for iy in range(self.y_width)。我们来看看calc_position这个方法做了什么。
def calc_position(self, index, minp): pos = index * self.resolution + minp return pos其实就计算了珊格所在位置的真实(x,y)坐标,比如我们的self.minx = 10,ix = 0,那么他的pos = 0 * 2 + 10 = 10,比如我们的self.minx = 10,ix = 1,那么他的pos = 1 * 2 + 10 = 12。我们遍历所有障碍物体的坐标,计算障碍物体(真实坐标)与这个机器人的距离,如果这个距离比机器人自身的大小小的话,我们将这个地方的珊格标志置为false表示有东西。
那么,在完成这个函数calc_obstacle_map时候,我们有了一张珊格地图,里面充斥着false和true,如果为true的话,那么机器人是过不去的,这块也就是设置成了障碍物区域。
我们接着往下看构造函数:
self.calc_obstacle_map(ox, oy) self.motion = self.get_motion_model()self.motion = self.get_motion_model()这段代码建立了机器人的运动模型和运动代价:
def get_motion_model(): # dx, dy, cost motion = [[1, 0, 1], #x增加1,y不变 代价为1 [0, 1, 1], [-1, 0, 1], [0, -1, 1], [-1, -1, math.sqrt(2)], [-1, 1, math.sqrt(2)], [1, -1, math.sqrt(2)], [1, 1, math.sqrt(2)]] return motion这里也就是机器人向左走(x+1,y+0)代价为1,斜着走代价为根号2。到此为止,我们构造函数讲解完了。我们返回主函数。
open_set这里开始正式进入路径规划了。传入的参数为起点坐标和终点坐标:
自动驾驶算法(一):Dijkstra算法讲解与代码实现我们先看下node类。
class Node: def __init__(self, x, y, cost, parent_index): self.x = x # index of grid self.y = y # index of grid self.cost = cost # g(n) self.parent_index = parent_index # index of previous Node def __str__(self): return str(self.x) + "," + str(self.y) + "," + str( self.cost) + "," + str(self.parent_index)首先执行构造函数,我们发现就是把珊格的(x,y)坐标(并非真实坐标是珊格的)还有cost(后文说)以及父节点的ID赋值了。(so easy)
我们在看一下calc_xy_index函数:
def calc_xy_index(self, position, minp): return round((position - minp) / self.resolution)它就是计算出真实世界的点点属于哪一个珊格的某一维度的坐标,我们举个例子:
self.calc_xy_index(sx, self.min_x) sx = 30 minx = 20这就代表我们的地图边界的 x 坐标为20,这个点的坐标x=30,我们用(30-20)/2 = 5,那么这个珊格坐标的x方向的坐标就是5。
start_node = self.Node(self.calc_xy_index(sx, self.min_x), self.calc_xy_index(sy, self.min_y), 0.0, -1) # round((position - minp) / self.resolution) goal_node = self.Node(self.calc_xy_index(gx, self.min_x), self.calc_xy_index(gy, self.min_y), 0.0, -1)因此,这段代码的含义就是我们计算出了起始和终止点的珊格坐标,并且将代价置为0,且他们的父节点为-1(没有父亲节点)。封装成了node。
下面进入算法部分,我们看流程图:
代码部分和流程图是一样的:
1.首先我们把起点放入openlist中:
# 设置openlist closelist 基于哈希表 open_set, closed_set = dict(), dict() # key - value: hash表 # 将startnode放进openset里面 索引为一维数组 open_set[self.calc_index(start_node)] = start_node看一下calc_index函数:这里将珊格地图映射成了一个一维数组,返回数组的ID,类似C++中的二维数组降维。这里openset是一个字典,里面的key是珊格地图点的ID,value是这个珊格节点。
def calc_index(self, node): return node.y * self.x_width + node.x2.while True进入循环
while 1:2.1 取openlist cost最小的节点作为当前节点
c_id = min(open_set, key=lambda o: open_set[o].cost) current = open_set[c_id]2.2.1 判断当前是否为终点,如果是终点,如果是终点的话把终点的cost修改为当前点的cost值,且终点的父亲节点为当前点的父亲节点。
# 判断是否是终点 if current.x == goal_node.x and current.y == goal_node.y: print("Find goal") # 当前节点的信息赋值给终点 goal_node.parent_index = current.parent_index goal_node.cost = current.cost break2.2.2 不是最终节点的话从openlist删除加入到closelist
# 把当前节点从openset里面删掉 del open_set[c_id] # 加入到closed set closed_set[c_id] = current2.3 遍历其9个邻接运动节点
for move_x, move_y, move_cost in self.motion:2.3.1 封装邻接节点
node = self.Node(current.x + move_x, current.y + move_y, current.cost + move_cost, c_id)这个点到邻接节点的移动就是 x +-( 1或-1或+根号2或-根号2),然后移动上下的话它的代价值需要+1,斜着移动需要 + 根号2,这样递归的进行我们就求出来所有点的代价值了,同样这个新走的点是通过我们这个点走过来的,因此新点的父节点就是我们这个点。
2.3.2 求当前节点的一维索引判断是否收录到closelist并判断是否可行,如果收录了,那么已经有最小路径了不需要我们再去处理了,还需要判断这个节点是否在珊格地图标记为false点上(珊格地图就是这么用的....)如果这个地方有障碍物那么我们也走不了。
# 求当前节点的key n_id = self.calc_index(node) # 是否已经收录到close set里面 if n_id in closed_set: continue # 邻接节点是否可行 if not self.verify_node(node): continue2.3.3 如果不在openset里面我们就将她作为一个新节点加入,如果在openset比较值是否是最优更新,是否和之前的最优路径有重叠。
if n_id not in open_set: open_set[n_id] = node # Discover a new node else: if open_set[n_id].cost >= node.cost: # This path is the best until now. record it! open_set[n_id] = node到这里我们的算法就结束了。我们迭代找到最终点后算法就break掉了~。
最后我们计算路径:
def calc_final_path(self, goal_node, closed_set): # generate final course rx, ry = [self.calc_position(goal_node.x, self.min_x)], [ self.calc_position(goal_node.y, self.min_y)] parent_index = goal_node.parent_index while parent_index != -1: n = closed_set[parent_index] rx.append(self.calc_position(n.x, self.min_x)) ry.append(self.calc_position(n.y, self.min_y)) parent_index = n.parent_index return rx, ry我们将最终节点的珊格坐标还原成真实的三维坐标,并向前找他们的父亲节点直到起始节点(parent_index= -1),我们就出来这个路径了。



