VX-3R APRS发射试验
VX-3R本身是不带APRS功能的,不过可能通过外加TNC实现APRS功能。
有大佬已经用Arduino实现了相应的发射功能:
https://github.com/handiko/Arduino-APRS
我要做的,就是简单修改一下代码,做一个转接板。
YEASU官方没有给出VX-3R的音频接口四节定义,估计是为了推销自家的CT-44,手册上只有这么一个图

在网上查了一圈,pinguide上有这么个图,然后提了一句“Pinouts for speaker and mic are reversed on the vx-3r”。但是经我实际验证,VX-3R的定义跟网站上是一样的,并没有reversed。
转接板原理图如下:
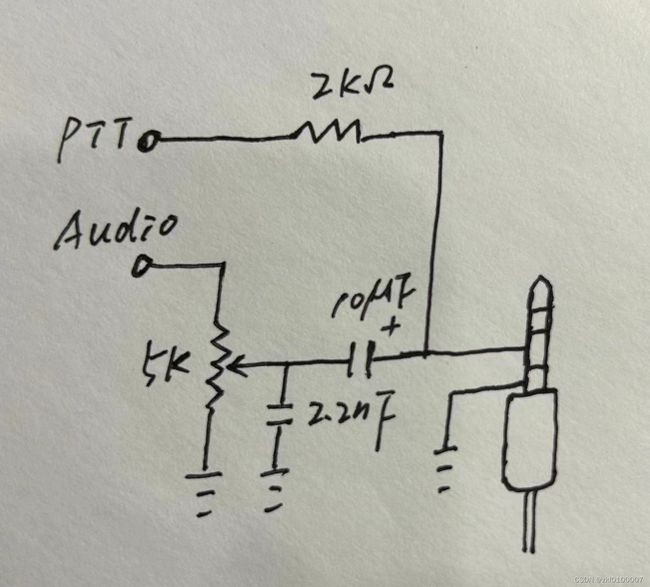
实物图如下:

值得注意的是,VX-3R的PTT是低电平发射。
完整的代码如下:
/*
* Copyright (C) 2018 - Handiko Gesang - www.github.com/handiko
*
* This program is free software: you can redistribute it and/or modify
* it under the terms of the GNU General Public License as published by
* the Free Software Foundation, either version 3 of the License, or
* (at your option) any later version.
*
* This program is distributed in the hope that it will be useful,
* but WITHOUT ANY WARRANTY; without even the implied warranty of
* MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
* GNU General Public License for more details.
*
* You should have received a copy of the GNU General Public License
* along with this program. If not, see
*/
/****** MYCALL ********/
Serial.print(mycall);
Serial.print('-');
Serial.print(myssid, DEC);
Serial.print('>');
/******** DEST ********/
if(dest_type == _NORMAL)
{
Serial.print(dest);
}
else if(dest_type == _BEACON)
{
Serial.print(dest_beacon);
}
Serial.print(',');
/******** DIGI ********/
Serial.print(digi);
Serial.print('-');
Serial.print(digissid, DEC);
Serial.print(':');
/******* PAYLOAD ******/
if(type == _FIXPOS)
{
Serial.print(_DT_POS);
Serial.print(lat);
Serial.print(sym_ovl);
Serial.print(lon);
Serial.print(sym_tab);
}
else if(type == _STATUS)
{
Serial.print(_DT_STATUS);
Serial.print(mystatus);
}
else if(type == _FIXPOS_STATUS)
{
Serial.print(_DT_POS);
Serial.print(lat);
Serial.print(sym_ovl);
Serial.print(lon);
Serial.print(sym_tab);
Serial.print(' ');
Serial.print(mystatus);
}
Serial.println(' ');
}
/*
*
*/
void setup()
{
set_io();
print_code_version();
}
void loop()
{
send_packet(random(1,4), random(1,3));
delay(tx_delay);
randomize(tx_delay, 10, 5000);
randomize(str_len, 10, 420);
}