【雷达原理】雷达信号级建模与仿真
目录
- 前言
- 一、LFMCW信号概述
-
- 1.1 优点
- 1.2 缺点
- 二、LFMCW信号模型
-
- 2.1 发射信号模型
- 2.2 接收信号模型
- 2.3 信号混频
- 三、MATLAB仿真
-
- 3.1 仿真结果
- 3.2 代码
- 四、参考文献
前言
雷达信号形式多种多样,按照雷达的体制进行分类,有脉冲雷达和连续波雷达。脉冲雷达使用脉冲波形串,收发一体,在发射信号期间关闭接收机,其一般功率较大,作用距离较远,主要应用在军事领域,包括海陆空的监视、导航和武器制导等。
连续波雷达则连续发射电磁能量,收发分置,即信号的发射和接收同时进行,受限于收发天线间隔离等因素,发射功率不能过大,导致作用距离较近,适用于探测近距离目标,当前在民用市场的应用较多,特别是车载雷达领域。
连续波雷达可分为未调制连续波和调制连续波,未调制连续波雷达可以用来测量目标的径向速度和角位置,但无法提取目标的距离信息,因此,为了提取目标的距离信息,通常采用频率调制的方式。
一、LFMCW信号概述
线性调频连续波(Linear Frequency Modulated Continuous Wave,LFMCW)雷达通过对发射信号的频率进行线性调制,进而对目标回波信号进行处理,达到提取目标距离信息的目的。
随着线性调频连续波雷达的不断发展,作用距离较短使其在近距离场景的探测中有着很大的优势。通过总结该体制雷达的特点,可以最大程度的发挥其优点,避免因其缺点造成的影响。
1.1 优点
(1) 无距离盲区
线性调频连续波雷达采用双天线配置,收发天线同时工作,在发射信号的同时对目标反射的回波进行接收,而脉冲雷达则收发一体,具有一定的探测盲区。同时,线性调频连续波雷达信号的调制时间较长(带宽较大),对近距离目标仍会存在差频,在探测近距离目标方面有着无可比拟的优势。
(2) 发射功率低,接收机灵敏度高
脉冲雷达由于发射短脉冲,其所需的峰值功率较高,易被敌方截获,而 LFMCW 雷达在一个调制周期内,其信号的时宽带宽积( B T BT BT)大,雷达在整个调制周期内都处于低功率状态。
(3) 距离分辨率高
LFMCW 雷达将发射信号与接收信号进行混频以实现下变频,得到较小带宽的拍频信号,拍频信号在混频之前是大带宽信号,因此整个系统信号带宽可以做更高, 以便适用于较高距离分辨率的场景中。
(4) 结构简单
由于发射信号的调制时间占空比为100%,通过大时宽来获取能量,因此在近距离测距时不需要较大的电压,且低电压下工作使系统避免了高功率器件的使用,使系统体积变小,容易固态化,降低工程实现的代价。
1.2 缺点
(1) 作用距离短
由于LFMCW雷达的收发天线同时工作,为了避免发射天线的信号功率泄露到接收天线上,发射天线与接收天线需要有一定的隔离度,因而发射天线的功率不能太高,这就使得雷达的探测距离受到了限制。
(2) 距离-速度耦合
当线性调频连续波雷达采用单调频的发射信号时,目标与雷达有相对运动时,由模糊函数理论可知,会产生 距离一速度耦合 现象,该现象会在测距时产生偏差,影响最终参数估计的准确性,因此,距离一速度耦合现象是阻碍LFMCW雷达发展的主要原因之一。
二、LFMCW信号模型
LFMCW 雷达常见的调制方式可分为两种:1) 三角波调制方式; 2) 锯齿波调制方式, 这两种方式基本原理都是利用发射信号和目标回波的差频信号,经过信号处理实现目标距离的探测。本博文主要介绍锯齿波调频。
2.1 发射信号模型
当雷达的发射信号为经过正交调制的线性调频信号时,其数学表达式可表示为:

A ( t ) A(t) A(t) 为复包络,其表达式如(1-2)所示,其中 T T T 为脉冲的宽度, μ = B / T μ=B/T μ=B/T 为调频斜率, B B B 为信号的带宽。
信号的相位为:

信号的瞬时频率为:

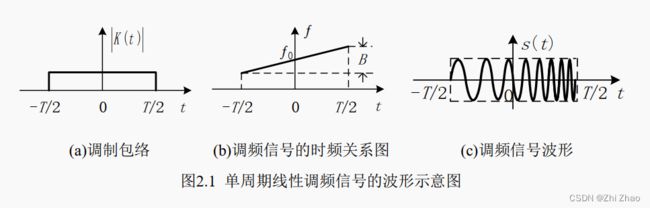
根据公式(1-2)可以画出LFM信号在单个调频周期内的包络如图2.1(a),根据公式(1-4)可以画出LFM信号的频率随时间变化关系如图2.1(b)所示,一个调制周期内LFM信号的波形如图2.1© 所示。
2.2 接收信号模型
雷达产生的发射信号经过天线后,以电磁波的形式向空中辐射,当有目标存在时,电磁波会发生反射、折射等现象,其中一部分电磁波会沿原路返回,并被天线接收,这个信号被称为目标回波,即雷达的接收信号。
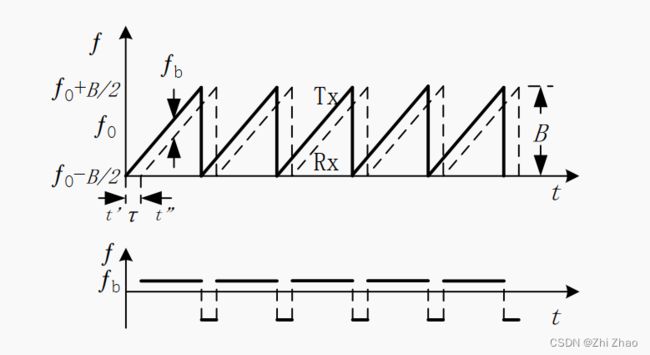
当雷达在 ′ 时刻向外发射调频连续波(电磁波),电磁波在空中飞行一段时间 τ τ τ 后,在"时刻到达接收天线,雷达发射信号与接收信号的关系如下图所示,由于时延 τ τ τ导致信号之间存在频率差为 f b f_{b} fb,即差拍频率。
根据式(1-4)可知,雷达发射端的信号频率与时间变化呈线性关系,对于静止的目标,没有多普勒效应, 如果不考虑接收机内部噪声和外部环境噪声的干扰,接收端的频率和发射端的频率变化关系保持一致,只是延迟了时间 τ τ τ。 因此,一个周期内目标回波信号的表达式可表示为:

2.3 信号混频
为了提取出差频信号,需要将发射信号(本振信号)与接收信号进行混频,混频的本质就是两个信号相乘。根据积化和差公式,两个角频率为 w 1 w_{1} w1和 w 2 w_{2} w2的正弦信号相乘:

可产生角频率为 ( w 1 + w 2 w_{1}+w_{2} w1+w2) 和( w 1 − w 2 w_{1}-w_{2} w1−w2)的正弦波信号,频率相加的分量称为上变频,频率相减的分量称为下变频。发射信号与接收信号混频后,其中下变频部分是对后续信号处理有用的信号,其频率一般在MHz级别。
当雷达采用正交调制方式产生发射信号时,发射信号与接收信号经过混频器处理后,表达式为:

相比于直接调频方式,采用正交调制的调频方式在接收到回波信号进行混频后没有高频项,但正交调频电路的设计也相对复杂。
混频后,信号的频率为:
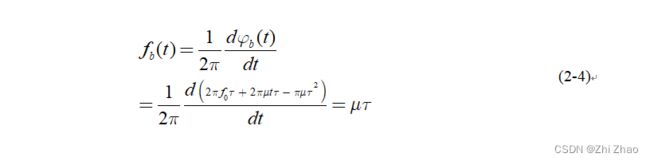
由上式可知,混频后信号的频率只与本振的调频斜率 μ μ μ 和回波信号的延迟时间 τ τ τ 有关,与其余的变量无关。
三、MATLAB仿真
3.1 仿真结果
(1) 利用MATLAB对中心频率为 f 0 = 0 f_{0}=0 f0=0 的线性调频信号进行仿真,依次为信号的实部、虚部、相位和频率。
(2) 利用MATLAB对中心频率为 f 0 = 77 G H z f_{0}=77GHz f0=77GHz 的线性调频信号进行仿真,信号的时长为 T = 100 u s T=100us T=100us。


3.2 代码
clc;
clear;
close all;
%% LFM信号参数
B = 20e6; % 带宽
T = 10e-6; % 脉冲宽度
u = B/T; % 调频斜率
fs = 2*B; % 采样率
N = T*fs; % 采样点数
%% LMF信号的基本特点
t = linspace(-T/2,T/2,N);
St = exp(1j*pi*u*t.^2); % 没有中心频率的LFM信号
phaseT = pi*u*t.^2; % 瞬时相位
Ft = u*t; % 瞬时频率
figure;
subplot(2,2,1);plot(t*1e6,real(St));xlabel('t/us');title('LFM信号实部');
subplot(2,2,2);plot(t*1e6,imag(St));xlabel('t/us');title('LFM信号虚部');
subplot(2,2,3);plot(t*1e6,phaseT);xlabel('t/us');title('LFM信号的相位变化');
subplot(2,2,4);plot(t*1e6,Ft);xlabel('t/us');title('LFM信号的频率变化');
clc;
clear;
close all;
%% LFM信号参数
B = 20e6; % 带宽
T = 100e-6; % 脉冲宽度
u = B/T; % 调频斜率
fs = 2*B; % 采样率
N = T*fs; % 采样点数
c = physconst('LightSpeed'); % 光速
f0 = 77e9; % 载频
Lambda = c/f0; % 波长
%% 模拟信号
t = linspace(0,T,N);
Phase_t = @(f0,u,t) 2*pi*(f0*t+1/2*u*t.^2); % LFM信号的相位表达式
Signal_Tx = rectpuls(t-T/2,T).*exp(1j*Phase_t(f0,u,t)); % 发射信号
figure;
subplot(2,1,1);plot(t,real(Signal_Tx));title('发射信号的实部');
subplot(2,1,2);plot(t,imag(Signal_Tx));title('发射信号的虚部');
R0 = 200; % 静止目标
tao = 2*R0/c; % 目标回波的时延
Signal_Rx = rectpuls(t-T/2,T).*exp(-1j*Phase_t(f0,u,(t-tao))); % 接收信号
figure;
subplot(2,1,1);plot(t,real(Signal_Rx));title('接收信号的实部');
subplot(2,1,2);plot(t,imag(Signal_Rx));title('接收信号的虚部');
Signal_Mix = Signal_Tx.*Signal_Rx;
figure;
subplot(2,1,1);plot(t,real(Signal_Mix));title('混频后信号的实部');
subplot(2,1,2);plot(t,imag(Signal_Mix));title('混频后信号的虚部');
四、参考文献
[1] 刘贺. 线性调频连续波雷达信号处理研究及数据分析[D].西南交通大学,2017.
[2] 许成洋. 相控阵LFMCW雷达信号处理方法及实现[D].西安电子科技大学, 2020.