VEX —— Matrix
目录
一,矩阵相关概念
3*3 矩阵
单位矩阵保持不变
使用矩阵位移点
使用矩阵旋转点
矩阵含义
设置矩阵值 setcomp
常用矩阵相关函数
二,案例
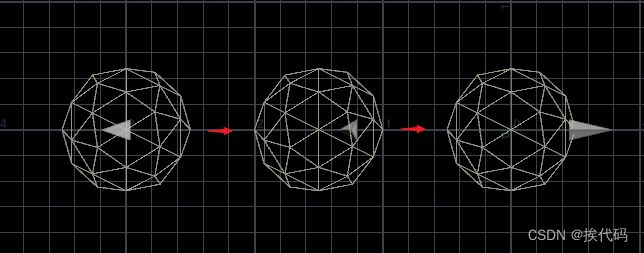
案例:源位置过渡到目标位置
参考 https://www.cnblogs.com/vfxJerry/p/12108565.html
一,矩阵相关概念
vex内基于row行vector,vector*matrix==matrix*vector;
向量{x, y, z, w},w=1表示位置,w=0表示方向;
vector3 * matrix4*4, vector3自动转化为vector4(w=1);
注,3*3矩阵和4*4矩阵之间转换需注意;
3*3 矩阵

Houdini内主要矩阵类型
- Identity Matrix
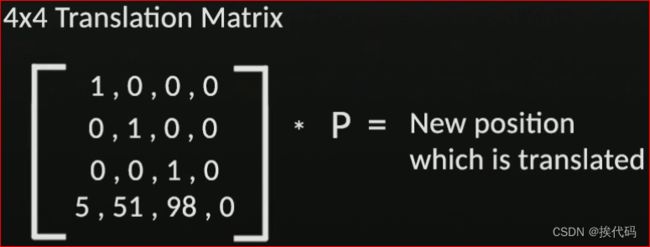
- Translation Matrix
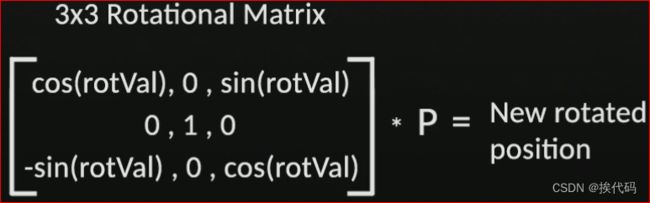
- Rotation Matrix
单位矩阵保持不变

使用矩阵位移点
- vex函数 translate ;
使用矩阵旋转点
- vex函数 rotate ;
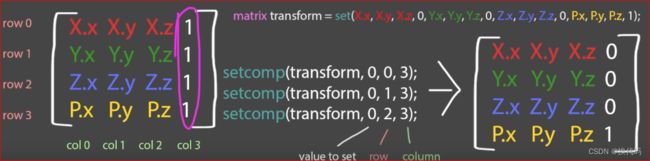
矩阵含义

设置矩阵值 setcomp
常用矩阵相关函数
ident()
translate()
rotate()
scale()
invert()
transpose()
maketransform()
cracktransform()
slerp()
instance()
lookat()
//变换
4@m=ident();
translate(@m, chv('trans'));
rotate(@m, ch('ang'),4);
scale(@m, chv('scale'));
@P *= @m;二,案例
案例:源位置过渡到目标位置
vector P = point(1, 'P', chi('num'));
vector N = point(1, 'N', chi('num'));
matrix m1 = instance(P, N, chv('scale'));
//方法一,直接插值过渡
@P *= slerp(ident(), m1, ch('bias'));
//方法二,提取各个变换分量,分别插值过渡,最后在合并
vector t,r,s;
cracktransform(0,0,set(0,0,0),m1,t,r,s);
t = lerp(set(0,0,0),t,ch('bias'));
s = lerp(set(1,1,1),s,ch('bias'));
//旋转过渡类似 r = -lerp(set(0,0,0),r,ch('bias'));
vector4 q = eulertoquaternion(radians(r), 0);
vector4 ql = slerp(quaternion(set(0,0,0)),q,ch('bias'));
r = degrees(quaterniontoeuler(ql,0));
@P *= maketransform(0,0,t,r,s);